курсовая ТСС 6 курс. ТСС 6 ВАРИАНТ заочка МК Ростов. Исследование работы и эксплуатационных характеристик дистанционных магнитных компасов
 Скачать 0.93 Mb. Скачать 0.93 Mb.
|

|
График зависимости девиации магнитного компаса от курса судна  Значение девиации, ° Курс судна, ° Таблица расчета коэффициентов девиации
Как видно из таблицы, значение коэффициентов девиации равно: A = 1,16; B = 4,6; C = 2,79; D = -3,95; E = -2,28. Сравнивая параметры девиации, видно, что в данном примере будет преобладать полукруговая девиация, порождаемая судовыми магнитными силами BlH = cZ + Pи CH = fZ + Q. Меньшие значения коэффициентов D и E свидетельствуют о том, что силы DH и EH обуславливающие четвертную девиацию меньше, но четвертная девиация присутствует.Практическое уничтожение четвертной девиации осуществляется совместно с уничтожением девиации от индукции, которая возникает от намагничивания компенсаторов четвертной девиации. Это осуществляется после уничтожения полукруговой девиации. Исходя из вышесказанного, необходимо принять меры для устранения полукруговой девиации. Для этого на судах применяют 2 способа: Способ Эри и Колонга. Уничтожение полукруговой девиации способом Эри Преимущественное влияние на величины девиации оказывают составляющие Р и Q, обусловленные наличием на борту судна магнитотвердых материалов. Это дает основание уничтожать полукруговую девиацию с помощью постоянных магнитов. Составляющие cZfZ., порождаемые магнитомягкими материалами, проявляют себя, в основном, в относительно высоких широтах и при необходимости их влияние может быть устранено дополнительно. 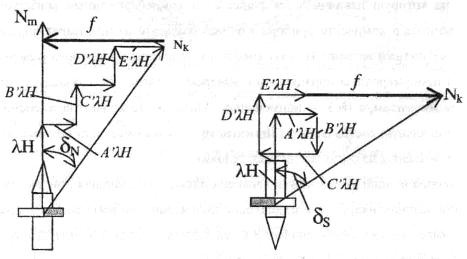 Уничтожение полукруговой девиации производится на четырех главных магнитных курсах судна. Порядок приведет судна на заданные курсы не имеет значения. Девиационные работы можно начинать с любого курса и в дальнейшем выбирать их и ходя из имеющейся навигационной обстановки и удобства маневрирования. Рассмотрим взаимную ориентацию CMC на указанных курсах. Если судно вдет на север, схема судовых магнитных сил примет вид, показанный на рисунке слева. Как следует из этого рисунка, девиация Nобусловлена наличием сил АH, СH, ЕH. Наша задача заключается в компенсации судовой магнитной силы СH. Но мы не знаем какую часть наблюдаемой девиации N она порождает. А поэтому с помощью постоянных поперечных магнитов, размещаемых в девиационном устройстве, приводим отсчет картушки на 0°, т.е. полностью устраняем наблюдаемую девиацию. Сила, создаваемая корректирующими магнитами в данном случае будет равна f. Для того, чтобы окончательно определить положение магнитов, при котором устраняется только сила СH необходимо перевести судно на магнитный курс 180°. Схема судовых магнитных сил, соответствующая указанному курсу, показана на рисунке справа. Результирующая сила, создающая девиацию, будет определяться следующим выражением: АH - СH + f = AH - СH + ЕH + АH + СH + ЕH = 2(АH + ЕH) Поскольку на курсе 0° была допущена перекомпенсация на величину АH + ЕH, a CMC, порождающая девиацию, равна удвоенному значению этой перекомпенсации, для ее устранения следует уменьшить наблюдаемую девиацию наполовину. Это достигается путем изменения степени влияния тех же поперечных магнитов. Следует иметь в виду, что при относительно больших значениях девиации МК уменьшение наблюдаемой девиации в два раза не вполне соответствует уменьшению наполовину судовых магнитных сил, ее порождающих. Однако, в большинстве практических случаев указанный прием вполне допустим. Для уничтожения полукруговой девиации, порождаемой судовой магнитной силой ВH, следует на курсе 90° (или 270°) с помощью продольных магнитов полностью устранить наблюдаемую девиацию, а на курсе 270° (или 90°) уменьшить ее вдвое. Способ Эри достаточно простой в реализации и позволяет качественно выполнить планируемые работы Уничтожение полукруговой девиации способом Колонга. В отличие от способа Эри в рассматриваемом случае уничтожение полукруговой девиации осуществляется на четырех главных компасных курсах. При этом принимается, как правило, имеющее место на практике допущение об относительной малости СМС АH и ЕH. При выполнении работ устраняется или уменьшается не наблюдаемая девиация, а непосредственно CMC ее вызывающие. С этой целью на указанные выше компасных курсах судна производится измерение горизонтальной составляющей Н судового магнитного поля. При принятых допущениях эта составляющая на курсах 0° и 180° будет определяться судовыми магнитными силами H, ВH и DH. Как следует из рисунка: 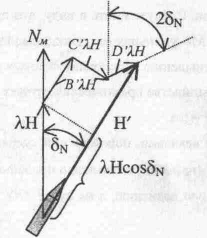 HN = HcosN + DHcosN + BH HS = H cosS + DHcosS - BH Совместное использование указанных равенств позволяет отделить силы, порождающие интересующую нас полукруговую девиацию, от сил ее не порождающих. Действительно, если вычислить среднее значение 0,5(HN + HS) напряженностей магнитного поля, измеренных на противоположных курсах судна, то это значение не будет зависеть от CMC BH: Нср = 0,5(HN + HS) = (H + DH)cos Следовательно, значение силы BH будет определяться разностью между HNили HS и Нср. Напряженность судового магнитного поля измеряется с помощью дефлектора, путем компенсации измеряемого поля полем его магнитов. Принимая во внимание сказанное, становится очевидной методика устранения полукруговой девиации. Действительно, зная величину Нср и выставив ее значение на дефлекторе, установленном на пеленгаторе компаса, мы с его помощью компенсируем указанную составляющую судового магнитного поля на одном из рассматриваемых курсов (N или S). В этих условиях на картушку будет действовать только сила BH, которая осталась нескомпенсированной. Названная сила устраняется с помощью продольных постоянных магнитов, расположенных в нактоузе МК. Уничтожение CMC СH производится аналогично рассмотренному на курсах 90° и 270°. 2.3 Анализ работы следящей системы
Девиация находится по следующей формуле. = МК – КК, погрешность работы дистанционной следящей системы находится как разница между КК и К Вычисления приведем в таблице:
На основе данных таблиц, построим график зависимости Девиации и Погрешности работы дистанционной следящей системы от МК.  Магнитный курс, ° Из графика видно, что наибольшее значение погрешность работы следящей сферы достигает своего максимального значения на курсах60°, 120°, 270° и 330°. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||