кинематические схемы. Практическая работа по теме _Изучение кинематических схем переда. Изучение кинематических схем передач в металлорежущих станках
 Скачать 126.48 Kb. Скачать 126.48 Kb.
|

|
Практическая работа № 1 Тема: «Изучение кинематических схем передач в металлорежущих станках» Цель: Ознакомиться с кинематическими схемами передач в металлорежущих станках. Изучить отдельные элементы, составить общее уравнение и рассчитать основные параметры кинематической цепи станка. Вопросы: Для ознакомления с кинематическими схемами передач в металлорежущих станках, необходимо ответить на следующие вопросы: 1 Что называется кинематической схемой? 2 Что называется кинематической цепью, звеном, передачей? 3 Выполнить таблицу условных обозначений схем кинематических (согласно ГОСТ 2.770–68). 4 Какие передачи наиболее часто встречаются в металлорежущих станках? 5 Что является основным параметром передачи? 6 Охарактеризовать каждую передачу, выполнив условные графические обозначения перечисленных передач. Порядок выполнения работы: Ответить на вопросы. Заэскизировать кинематическую схему станка. Расшифровать индекс данного станка. Составить уравнение кинематической цепи станка Рассчитать кинематическую цепь всех частот вращения шпинделя (nш). Вывод: Практическая работа № 1 Тема: «Изучение кинематических схем передач в металлорежущих станках» Для анализа движений различных органов станков применяются упрощённые, условные графические схемы механизмов, дающие наглядное представление о кинематике станков и в некоторой степени представление об их конструкции. Такие схемы называются кинематическими, и для их вычерчивания применяют условные обозначения (согласно ГОСТ 2.770–68). Кинематическая схема станка состоит из отдельных кинематических цепей. Кинематические схемы вычерчивают в произвольном масштабе. Однако следует стремиться вписывать кинематическую схему в контуры основной проекции станка или важнейших его узлов, добиваясь сохранения их относительного расположения. Для станков, у которых наряду с механическими передачами имеются гидравлические, пневматические и электрические устройства, составляются также гидравлическая, пневматическая, электрическая и другие схемы Под кинематической цепью станка понимают совокупность ряда передач, обеспечивающих передачу движений от начального звена к конечному, например, от электродвигателя к шпинделю. Кинематические цепи состоят из отдельных элементов, называемых звеньями. Два взаимодействующих между собой звена составляют кинематическую пару или передачу. Передачи передают движение от одного звена к другому или преобразуют одно движение в другое, например, вращательное в поступательное. В передаче элемент, передающий движение, называется ведущим, а получающий движение – ведомым. В условные обозначения параметров шестерни входит индекс 1, а в условные обозначения параметров колеса - индекс 2. Основным параметром передачи является передаточное отношение ( i ), которое показывает во сколько раз частота вращения ведомого элемента ( n2 ) больше или меньше частоты вращения ведущего элемента ( n1 ): i = n2/n1 (1) Передаточное отношение кинематической цепи равно произведению передаточных отношений всех последовательно соединённых передач, составляющих данную цепь: iц = i1 . i2 . i3 . … . in. (2) Наиболее часто применяются шесть типов передач, комбинации которых позволяют создать самые разнообразные машины и механизмы – ремённые, цепные, зубчатые с цилиндрическими (оси параллельны) и коническими (оси перпендикулярны) колесами, червячные, реечные и винтовые (рисунок 1). 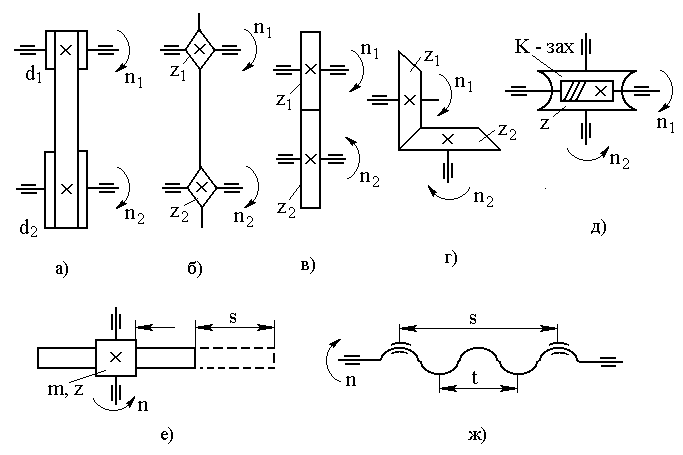 Рисунок 1 - Основные типы передач металлорежущих станков: а – ременная; б – цепная; в, г – зубчатые; д – червячная; е – реечная; ж – винтовая Ременная передача (рисунок 1, а)  Рисунок 1, а - Ременная передача Ременная передача (рис. 1, а) осуществляется клиновидными, плоскими или круглыми ремнями. Ременная передача применяется чаще всего для передачи движения от электродвигателя к шпиндельной бабке станка. Передаточное отношение ременной передачи определяется: i = d1 . k / d2= n2 . k / n1, (3) где k = 0,98 – коэффициент, учитывающий проскальзывание ремня; d1 – диаметр ведущего шкива; d2 – диаметр ведомого шкива; n1 и n2 – частоты вращения ведущего и ведомого валов. Направления вращения ведущего и ведомого валов совпадают при открытой передаче. Наиболее распространенными являются клиновые ремни ввиду некоторых преимуществ перед плоскими: повышенная тяговая способность, лучшая эксплуатация, меньшие простои при замене ремня. Цепная передача  Рисунок 1, б - Цепная передача Она применяется для передачи движения от одного вала к другому, находящемуся сравнительно на большем расстоянии, чем при зубчатой передаче, осуществляется двумя звёздочками и соединяющей их роликовой цепью. Передаточное отношение цепной передачи равно: i = z1 / z2 = n2 / n1, (4) где z1, z2 – количество зубьев ведущей и ведомой звёздочек; n1, n2 – частоты вращения ведущего и ведомого валов. Отношение z1 / z2 называется передаточным отношением цепной передачи, где z1 и z2 — числа зубьев ведущей и ведомой звездочек. Направление вращения валов всегда одинаково где z1, z2 – количество зубьев ведущей и ведомой звёздочек; n1, n2 – частоты вращения ведущего и ведомого валов.  Зубчатая передача Рисунок 1, в, г - Зубчатая передача Рисунок 1, в, г состоит из пары цилиндрических или конических зубчатых колёс. Предаточное отношение зубчатой передачи равно: i = z1 / z2 = n2 / n1, (5) где z1, z2 – количество зубьев ведущего и ведомого зубчатых колёс; n1, n2 – частоты вращения ведущего и ведомого валов. Передача компактна, может передавать большие крутящие моменты. Применяется для изменения чисел оборотов и величин подач в коробках скоростей и подач, а также в качестве привода от электродвигателя к станку и к другим механизмам. Характеризуется постоянством передаточного отношения. В зубчатой передаче из двух зубчатых колес направления вращения ведущего и ведомого валов различные. При необходимости изменения направления вращения устанавливают промежуточное (паразитное) колесо. 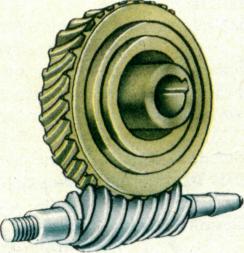 Червячная передача Червячная передача (Рисунок 1, д) состоит из червячного колеса и червяка и применяется для резкого снижения числа оборотов ведомого вала одной передачей, а также для плавности и равномерности движения и в делительных цепях станков. Червяк всегда является ведущим, а червячное колесо ведомым элементом. Если число заходов червяка равно К, а червячное колесо имеет z зубьев, то передаточное отношение равно: i = К / z, (6) где К - число заходов червяка; z - число зубьев. червячного колеса. Реечная передача 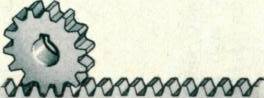 Рисунок 1, е - Реечная передача В станках реечная передача применяется для перемещения кареток суппортов, столов и других частей. Реечная передача состоит из рейки и зубчатого колеса и служит для преобразования вращательного движения зубчатого колеса в поступательное движение рейки. Если число зубьев на колесе равно z, а модуль (величина зуба) и шаг (расстояние между вершинами соседних зубьев) рейки соответственно m и t, то при n оборотах шестерни рейка пройдёт путь S (в мм): S = t·z·n = ·m·z·n, (7) где t – шаг (расстояние между вершинами соседних зубьев) рейки; z - число зубьев на колесе равно z; m - модуль; n - число оборотов шестерни. Винтовая передача Рисунок 1, ж - Винтовая передача Винтовая передача применяется для перемещения столов, суппортов, салазок и других частей станков. Винтовая передача состоит из винта и гайки. Она преобразует вращательное движение винта в поступательное движение гайки. Если шаг винта (расстояние между вершинами соседних витков) t, то путь гайки S (в мм) за n оборотов винта равен: S = t·n, (8) где t – расстояние между вершинами соседних витков; n – число оборотов винта. Для обеспечения регулирования частоты вращения шпинделя в кинематических цепях металлорежущих станков используются следующие механизмы (рисунок 2): 1. Паросменные колёса (рисунок 2, а), устанавливающиеся с помощью шпоночных или шлицевых соединений на ведущем 1 и ведомом 2 валах. Для изменения частоты вращения ведомого вала колёса снимают с валов и меняют местами или устанавливают другую пару колёс.  Рисунок 2 - Механизмы металлорежущих станков : а – паросменные колёса; б – блок подвижных колёс; в – механизм перебора; г, д – реверсивные механизмы 2. Блоки подвижных зубчатых колёс (рисунок 2, б) обеспечивают быстрое переключение скоростей. Колёса z1, z3, z5 жёстко насажены на вал 1. Блок, объединяющий колёса z2 , z4 , z6 , перемещаясь по валу 2, обеспечивает три передаточных отношения: i1 = z1 / z2 ; i2 = z3 / z4 ; i3 = z5 / z6. Используются подвижные блоки с двумя, тремя и, реже, с четырьмя колёсами. 3. Механизм перебора (рисунок 2, в) обеспечивает передачу вращения от ведущего шкива прямо на шпиндель 1 (муфта М включена i1 = 1) либо через шестерни перебора и вал 2 на шпиндель (муфта М выключена): i2 = (z1 / z2) . (z4 / z3). Перебор позволяет резко снизить частоту вращения шпинделя, например, при нарезании резьбы. 4. Реверсивный механизм из цилиндрических зубчатых колёс (рисунок 2, г) обеспечивает вращение ведомого вала 2 в прямом и обратном направлении. С помощью кулачковой муфты М вращение от вала 1 к валу 2 передаётся либо через колёса z1, zn, z2, тогда направление вращения вала 2 совпадает с направлением вращения вала 1, либо через колёса z3, z4, тогда направление вращения вала 2 не совпадает с направлением вращения вала 1. 5. Реверсивный механизм с коническими зубчатыми колёсами (рисунок 2, д) применяется в тех случаях, когда ведомый и ведущий валы перпендикулярны друг другу. Вращение от ведущего вала 1, через коническое колесо z1, передаётся на ведомые колёса z3 и z2, которые свободно вращаются на ведомом валу 2 навстречу друг другу. Муфта М, входя в зацепление с коническими колёсами z2 или z3, обеспечивает вращение вала 2 в прямом или обратном направлении. В металлорежущих станках (со ступенчатым регулированием) частоты вращения шпинделя назначаются по закону геометрического ряда, т. е. nmin = n1; n2 = n1 . ; n3 = n2 . = n1 . 2. . . . . ni = n1 . i-1, где – знаменатель геометрической прогрессии. Отношение наибольшей частоты вращения шпинделя станка к наименьшей называется диапазоном регулирования станка R: R = nmax/ nmin. Величина R показывает универсальность станка. Если число частот вращения шпинделя равно z, то nmax = nmin . z-1, а величина знаменателя геометрического ряда определяется:  . .Относительное изменение частоты вращения n между двумя соседними частотами вращения n1 и n2, выраженное в %, представляет собой перепад скоростей А: А = (n2 – n1) / n2 ·100% = ( – 1) / ·100% = const. Значения знаменателей геометрического ряда частот вращения и перепады скоростей металлорежущих станков стандартизированы и приведены в таблице 1. Таблица 1 - Стандартные значения знаменателей геометрического ряда и перепадов скоростей металлорежущих станков
В современных металлорежущих станках частота вращения шпинделя регулируется при помощи КОРОБОК СКОРОСТЕЙ. Их конструируют встроенными в станину или переднюю бабку станка. На рисунке 3 представлена схема двенадцатиступенчатой коробки скоростей. Для передачи вращения от электродвигателя валу 1 служит клиноременная передача; от вала 1 валу 2 – механизм с тройным блоком, обеспечивающий передаточное отношение 27/55, 21/61 или 34/48; от вала 2 валу 3 – механизм с двойным блоком, обеспечивающий передаточное отношение 20/60 или 41/41;  Рисунок 3 - Двенадцатиступенчатая коробка скоростей от вала 3 валу 4 – цилиндрическая зубчатая передача (52/38), а далее либо прямо на шпиндель (i = 1), если муфта включена, либо через механизм перебора (i = 20/56 . 20/56), если муфта выключена. Для расчёта всех частот вращения шпинделя (nш) составляется уравнение кинематической цепи, представляющее собой произведение частоты вращения приводного электродвигателя (nэ.д.) на передаточные отношения всех последовательных передач от электродвигателя к шпинделю:  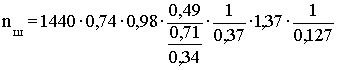 Таким образом, данная кинематическая цепь, благодаря одному механизму с тройным блоком, одному механизму с двойным блоком и механизму перебора, обеспечивает (3 . 2 . 2 =12) частот вращения шпинделя. n1 = 1440 . 0,74 . 0,98 . 0,49 . 1 . 1,37 . 1 = 701 n2 = 1440 . 0,74 . 0,98 . 0,71 . 1 . 1,37 . 1 = 1015 n3 = 1440 . 0,74 . 0,98 . 0,34 . 1 . 1,37 . 1 = 486 n4 = 1440 . 0,74 . 0,98 . 0,49 . 0,37 . 1,37 . 1 = 259 n5 = 1440 . 0,74 . 0,98 . 0,71 . 0,37 . 1,37 . 1 = 376 n6 = 1440 . 0,74 . 0,98 . 0,34 . 0,37 . 1,37 . 1 = 180 n7 = 1440 . 0,74 . 0,98 . 0,49 . 1 . 1,37 . 0,127 = 89 n8 = 1440 . 0,74 . 0,98 . 0,71 . 1 . 1,37 . 0,127 = 129 n9 = 1440 . 0,74 . 0,98 . 0,34 . 1 . 1,37 . 0,127 = 62 n10 = 1440 . 0,74 . 0,98 . 0,49 . 0,37 . 1,37 . 0,127 = 33 n11 = 1440 . 0,74 . 0,98 . 0,71 . 0,37 . 1,37 . 0,127 = 48 n12 = 1440 . 0,74 . 0,98 . 0,34 . 0,37 . 1,37 . 0,127 = 23 Полученные частоты вращения шпинделя переписываем в порядке возрастания: nmin = n1 = 23; n2 = 33; n3 = 48; n4 = 62; n5 = 89; n6 = 129; n7 = 180; n8 = 259; n9 = 376; n10 = 486; n11 = 701; n12 =1015 После этого определяются: диапазон регулирования R, величина знаменателя геометрического ряда и перепад скоростей А: R = nmax / nmin = 1015 / 23 = 44,1; n2 / n1 = n5 / n4 = n12 / n11 или  A = ( – 1·100% = (1,41 – 1)·100% / 1,41 = 29%. Контрольные вопросы 1. Как классифицируются металлорежущие станки? 2. Что определяет индекс металлорежущего станка? 3. Что называется кинематической схемой станка? 4. Какие передачи наиболее часто встречаются в металлорежущих станках? 5. Что называется передаточным отношением? 6. Чему равно передаточное отношение кинематической цепи? 7. Какие механизмы используются для регулирования частоты вращения? 8. Какие механизмы применяются для изменения направления вращения валов? 9. Как составляется уравнение кинематической цепи? 10. Какие параметры характеризуют кинематическую схему металлорежущего станка? 11. Для чего служит механизм перебора? |