Кинематический анализ механизма
 Скачать 1.87 Mb. Скачать 1.87 Mb.
|

2. Силовой расчет рычажного механизма2.1. Определение движущей силы Р (силы сопротивления, приложенной к ползуну 5) Строим механизм во всех положениях согласно данным индикаторную диаграмму. Определяем масштаб диаграммы: Определяем силу Р сопротивления:
2.2. Определение сил инерции звеньев Определяем силы инерции и момент от пары сил, действующие на звенья механизма по формулам. Положение №1 Положение №2 Положение №3 Положение №4 Положение №5 Положение №6 Значения этих величин сведем в таблицу 5. Таблица 5
Прикладываем внешние силы G2, G3, Pи2, Ри3, Р3, момент МИ2 и неизвестные реакции R12, R03 к звеньям 2, 3. Силы Ри2 и G2 в центре масс S2 звена 2, силы Риз и G3 — в центре масс S3 звена 3. Причем силы Ри2 и Ри3 направляем в стороны, противоположные соответственно ускорениям as2 и аs3 (точка S3 совпадает сточкой С). Момент МИ2 прикладываем к звену 2 в сторону, противоположную угловому ускорению. 2.3. Определение реакций в кинематических парах групп Ассура Звенья 2 и 3. Реакция R12 неизвестна ни по величине, ни по направлению. Разбиваем ее на две составляющие нормальну и тангециальную Величина реакции Для положения №1: 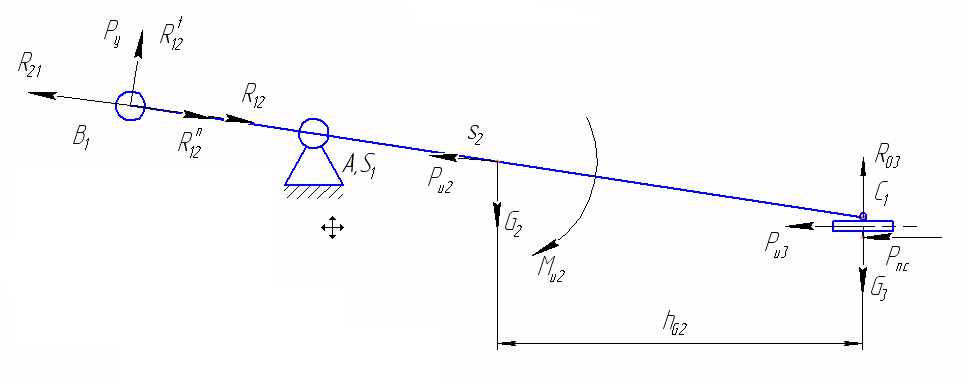 Для положения №2: 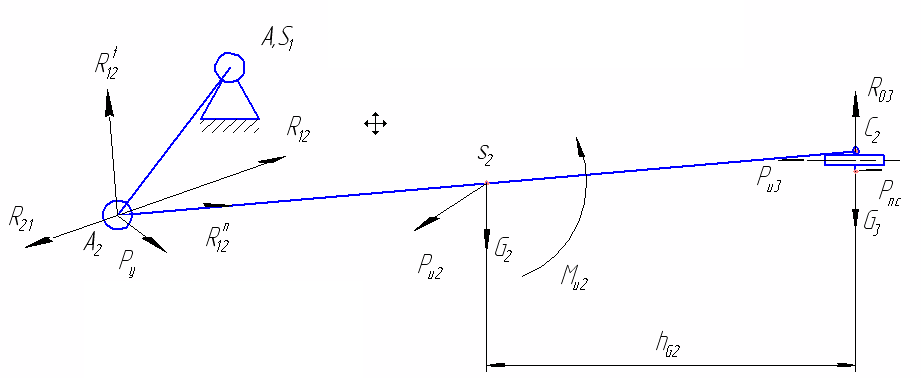 Для положения №3: 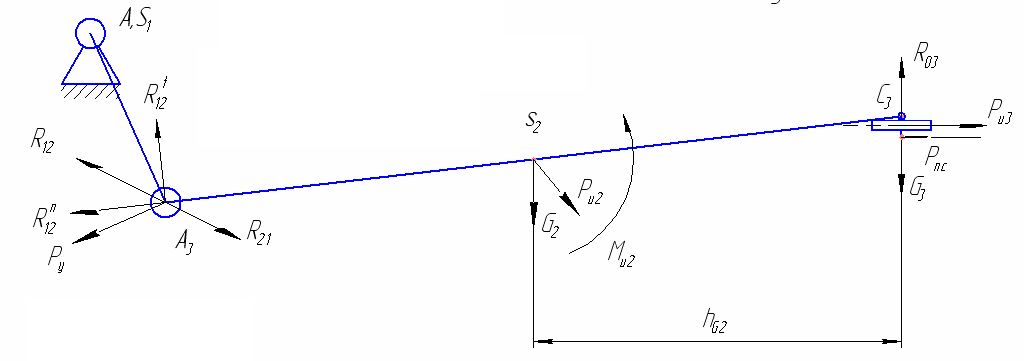 Для положения №4: 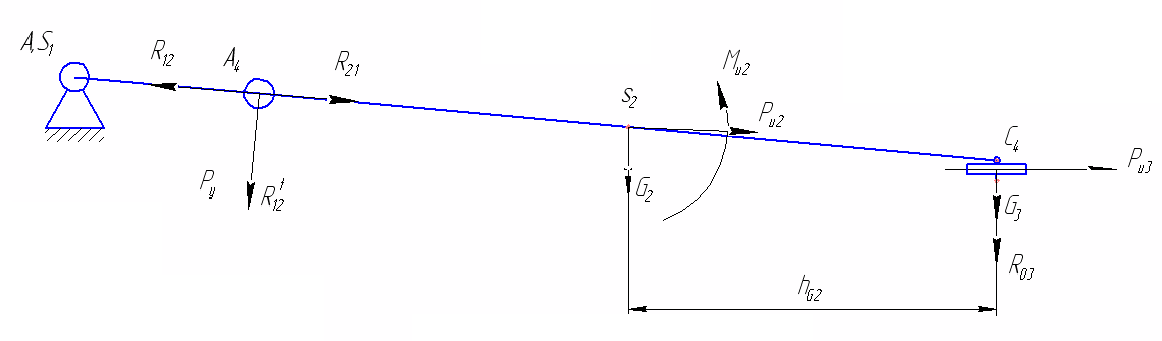 Для положения №5: 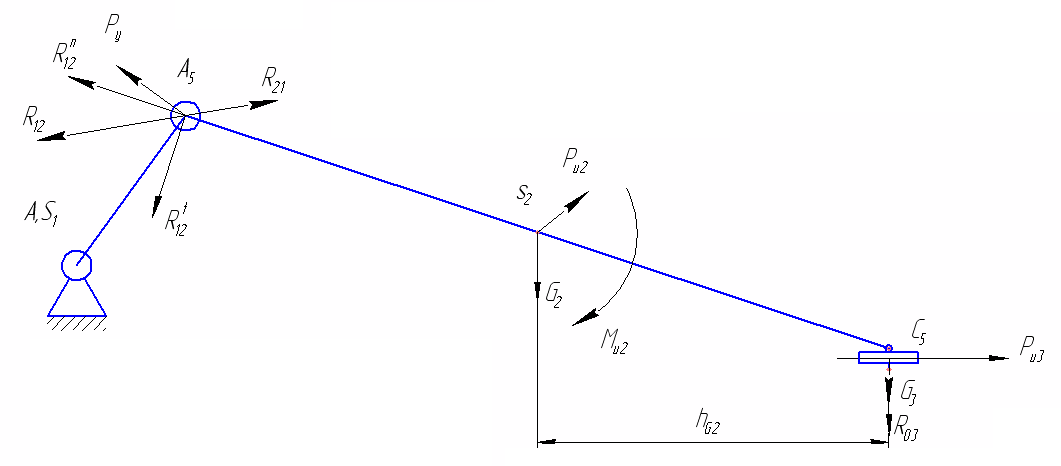 Для положения №6: 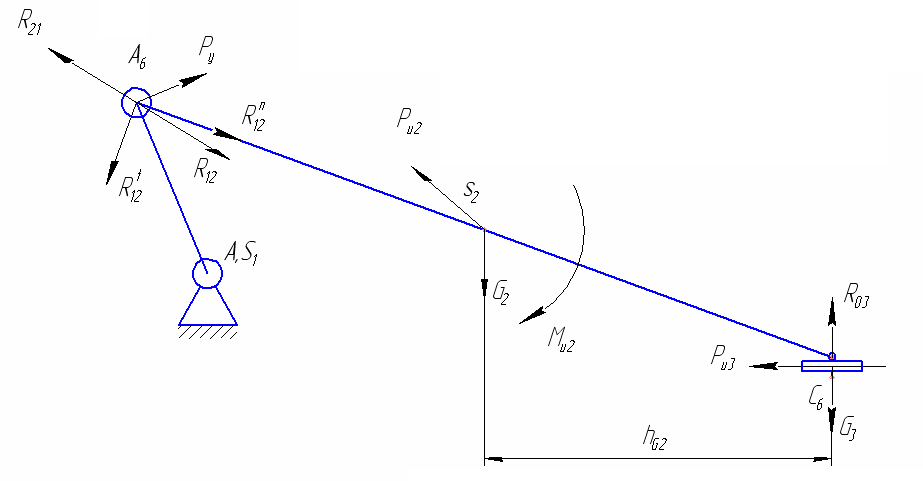 Реакция R03 — это сила действия со стороны стойки на ползун 3. Направлена перпендикулярно оси движения ползуна. Построение плана сил. Из произвольной точки 12 в масштабе Планы сил. №1 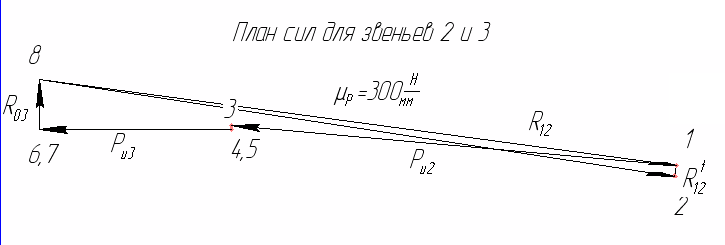 №2 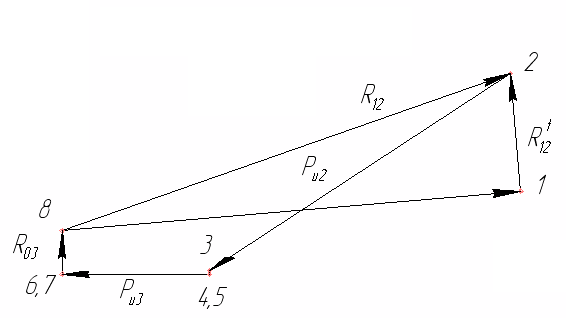 №3 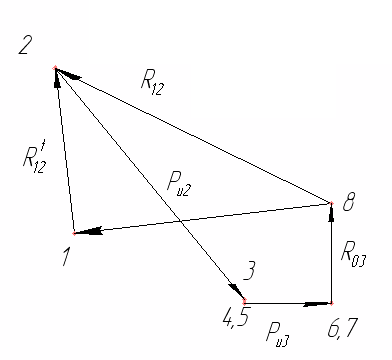 №4 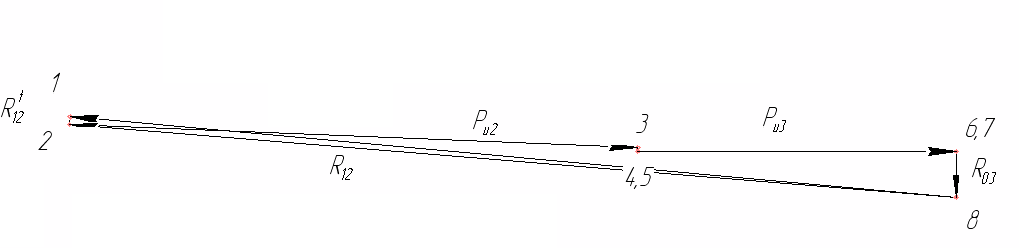 №5 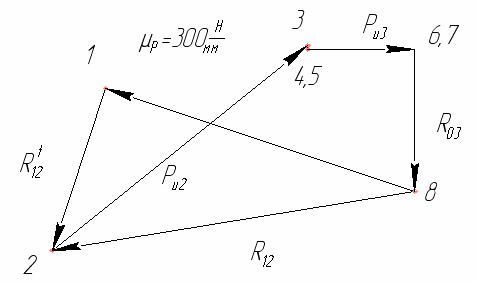 №6 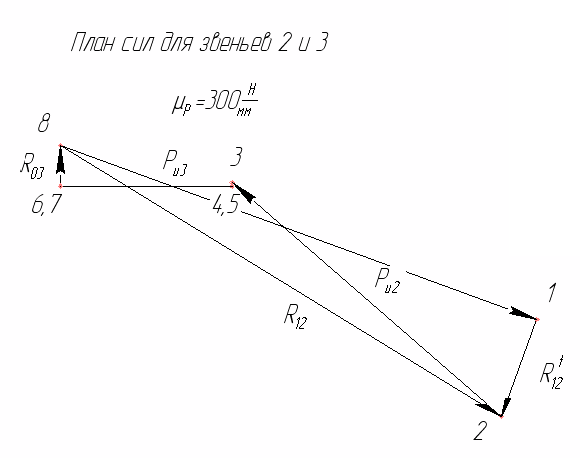 Численные данные всех сил для звеньев 2 и 3 сведем в таблицу 6. Таблица 6
2.4. Силовой расчет ведущего звена механизма Изображаем ведущее звено ОА со стойкой с действующими на него силами. Ведущее звено имеет степень подвижности W = 1, поэтому под действием приложенных к нему сил, в том числе и сил инерции, его нельзя считать находящимся в равновесии. Чтобы имело место равновесие, необходимо дополнительно ввести силу или пару, уравновешивающие все силы, приложенные к ведущему звену. Эта сила и момент носят название уравновешивающей силы Ру и уравновешивающего момента Му. Изображаем ведущее звено ОА и стойку с приложенными к нему силами. В точке В на ведущее звено действуют силы №1 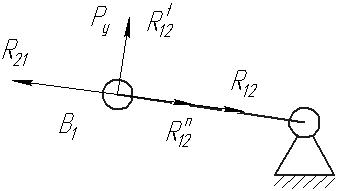 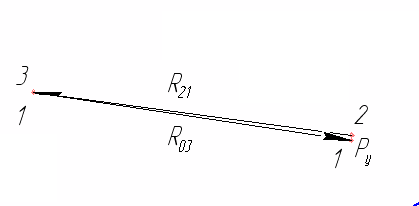 №2 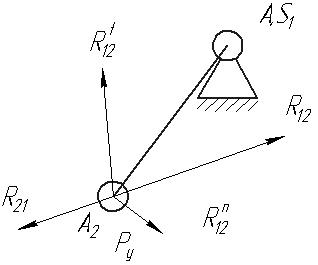 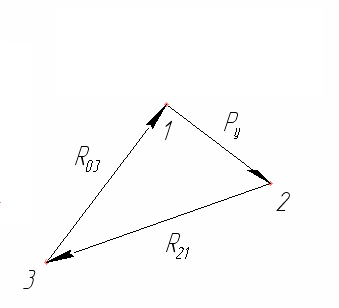 №3 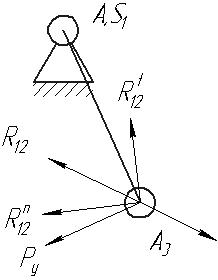 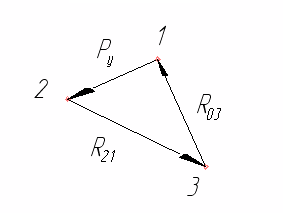 №4 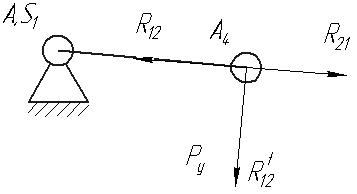 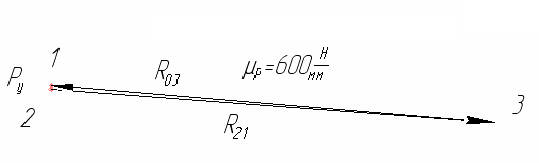 №5 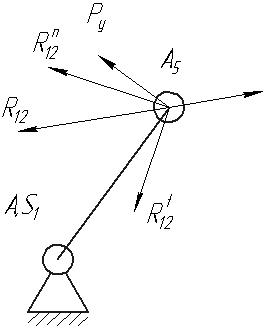 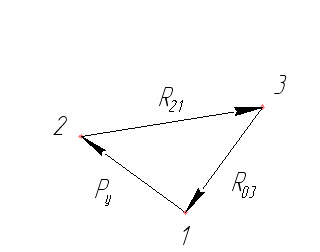 №6 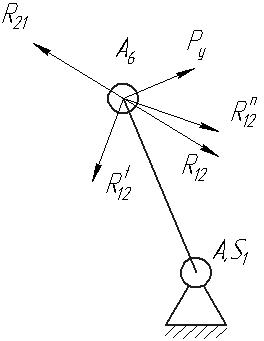 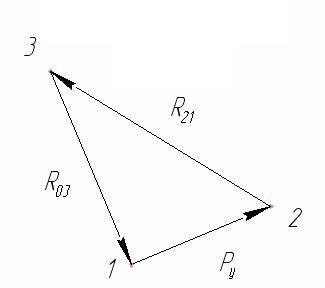 Численные значения сведем в таблицу 7. Таблица 7
Для определения реакции Rо со стороны стойки на ведущее звено строим план сил в масштабе Откладываем последовательно известные силы Ру и Точку 3 соединяем прямой с точкой 1 (замыкаем многоугольник). Отрезок 3-1 определяет величину реакции R01. 2.5. Рычаг Н.Е. Жуковского. Расчет производим для положения №6, так как в нем уравновешивающая сила максимальна. Строим повернутый на 90 градусов план скоростей. Прикладываем в соответствующие точки все силы. Заменим момент Ми2 парой сил. Тогда имеем  Сравниваем результаты вычислений уравновешивающей силы Ру, найденной методами планов сил и рычага Н. Е. Жуковского. Расхождение результатов составляет: 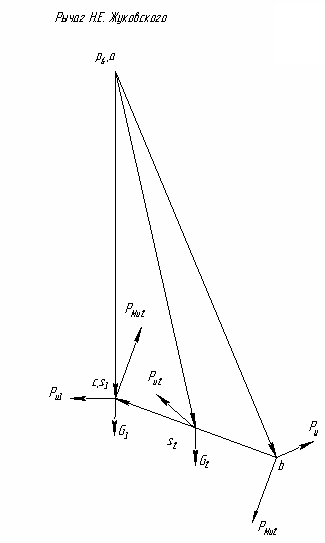 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||