Кинематический анализ механизма
 Скачать 1.87 Mb. Скачать 1.87 Mb.
|

ОглавлениеОглавление 2 Задание 3 Введение 4 1. Кинематический анализ механизма 5 1.1. Проектирование кривошипно-ползунного механизма 5 1.2. Структурное исследование механизма 5 1.3. Построение схемы механизма 5 1.4. Построение планов скоростей механизма 6 1.5. Построение планов ускорений механизма 12 1.6. Кинематические диаграммы точки D ползуна 3 18 1.7. Расчет скоростей и ускорений ползуна методом Зиновьева. 21 Метод Зиновьева. Положение 1. 22 Метод Зиновьева. Положение 4. 25 Метод Зиновьева. Положение 5. 26 Метод Зиновьева. Положение 6. 27 2. Силовой расчет рычажного механизма 28 2.1. Определение движущей силы Р (силы сопротивления, приложенной к ползуну 5) 28 2.2. Определение сил инерции звеньев 28 2.3. Определение реакций в кинематических парах групп Ассура 29 2.4. Силовой расчет ведущего звена механизма 36 2.5. Рычаг Н.Е. Жуковского. 40 3. Расчет маховика. 42 4. Синтез кулачкового механизма. 52 4.1. Определение минимального радиуса кулачка Rmin 52 4.2. Построение профиля кулачка 52 Список литературы 54 Заданиепо схеме №1 вариант 5. 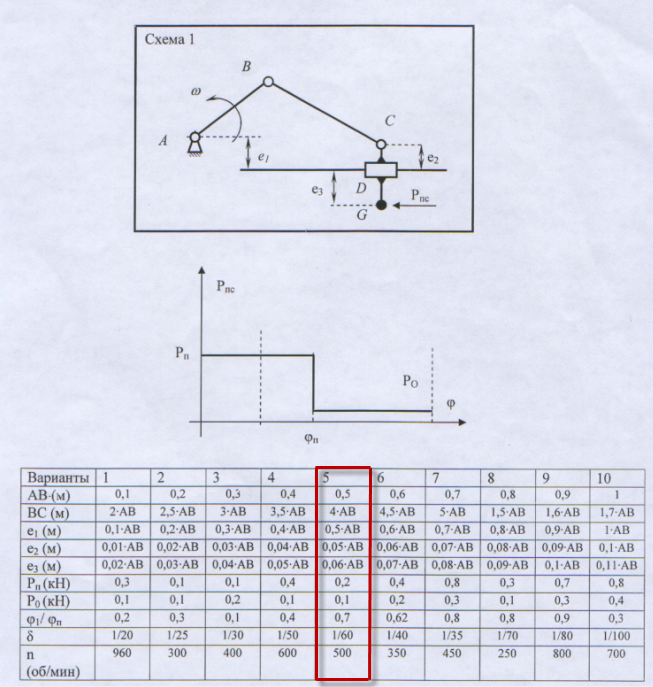 ВведениеОбъектом исследования является кривошипно-ползунный механизм. В курсовом проекте исследованию подлежат рычажный и кулачковый механизм. Рычажный механизм служит для преобразования возвратно-поступательного перемещение ползуна 3 из вращательного движения кривошипа 1. В рычажных механизмах угловая скорость непостоянна и для более равномерного движения на валу кривошипа установлен маховик. Для управления зажимом деталей применяется кулачковый механизм, который служит для преобразования вращательного движения в поступательное движение ведомого звена. 1. Кинематический анализ механизма1.1. Проектирование кривошипно-ползунного механизма Значения длин кривошипа АВ и шатуна ВС даны по условию. 1.2. Структурное исследование механизма Определяем степень подвижности механизма по формуле П.Л. Чебышева. где Определяем класс и порядок механизма. Для этого разделим механизм на группы Ассура. Этот механизм состоит из одной группы Ассура II класса 1-го порядка 2-го вида (рис. 1, а), одной группы Ассура II класса 2-го порядка 2-го (рис. 1, а) вида и механизма I класса, состоящего из ведущего звена 1 и стойки 6. В целом рассматриваемый механизм II класса 2-го порядка. 1.3. Построение схемы механизма Масштаб схемы. Приняв на чертеже (см. лист 1 приложения) отрезок АB = 25 мм, находим: В принятом масштабе вычерчиваем схему механизма. Для построения 6 положений звеньев механизма разделим траекторию, описываемую точкой B кривошипа, на 6 равных частей. В качестве нулевого принимаем то положение кривошипа, при котором точка C ползуна занимает крайнее левое положение. Из отмеченных на окружности точек В0, В1…В6 раствором циркуля равным 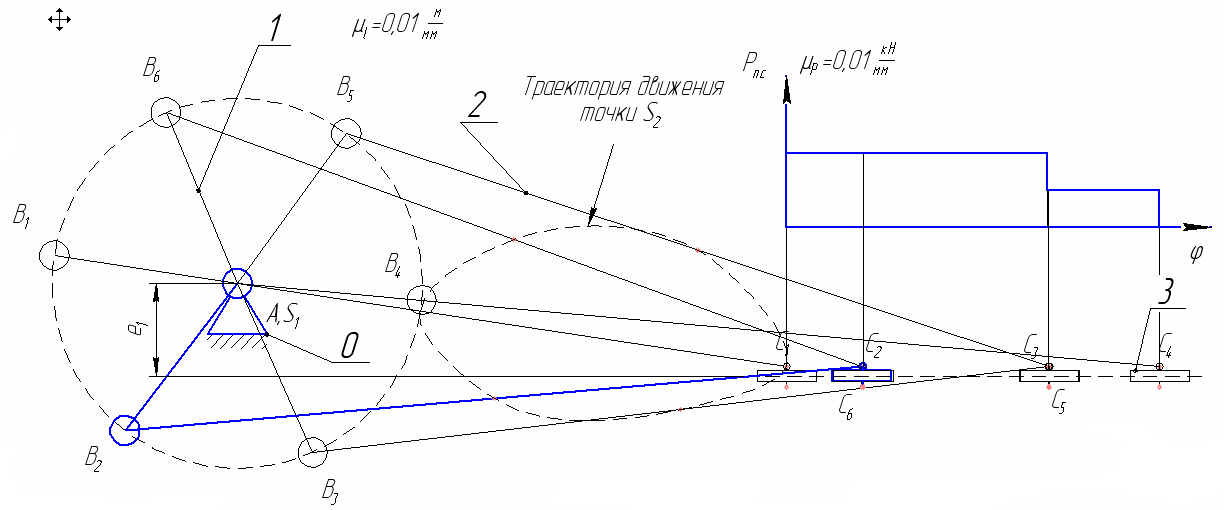 1.4. Построение планов скоростей механизма Определяем скорость точки В. Построение начинаем от ведущего звена. Из точки р, принятой за полюс плана скоростей (лист 1 приложения), откладываем в направлении вращения кривошипа АВ вектор скорости точки В : рb = 52,4 мм. Построение плана скоростей группы Ассура II класса 1-го вида (звенья 2 и 3) производим по уравнению:  Из точки b проводим линию, перпендикулярную оси звена ВC, а из полюса р плана скоростей — линию, параллельную оси движения ползуна С. Точка с пересечения этих линий даст конец вектора искомой скорости Скорости точек S2 и S3 определяем по правилу подобия. Истинное значение скорости каждой точки определяем по формулам: Расчет скоростей производим для всех положений. Положение №1. 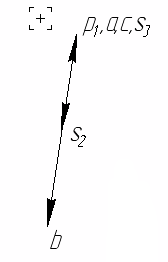 Положение №2. 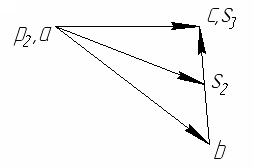 Положение №3 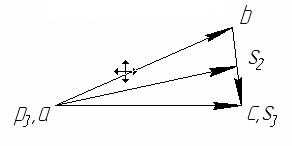 Положение №4 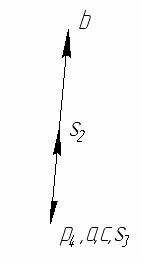 Положение №5 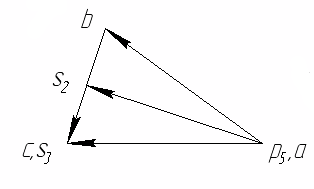 Положение №6 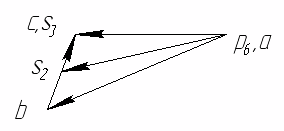 Получение значения сводим в табл. 1. Таблица 1 Значения скоростей точек механизма
Определяем (табл. 2) угловую скорость шатуна ВС для всех положений по формуле: Положение №1 Положение №2 Положение №3 Положение №4 Положение №5 Положение №6 Таблица 2
Направление угловой скорости звена ВС определяется следующим образом. Переносим мысленно вектор bс с плана скоростей в точку С шатуна 2 и наблюдаем направление поворота этого звена вокруг точки В. Например, в положении 2 угловая скорость ω2 направлена против часовой стрелки. 1.5. Построение планов ускорений механизма Построение плана ускорений рассмотрим для всех положений механизма (лист 2 приложения). Так как кривошип АВ вращается с постоянной угловой скоростью, то точка В кривошипа будет иметь только нормальное ускорение, величина которого равна Масштаб плана ускорений определяется по формуле где πb = 68,4 мм — длина отрезка, изображающего на плане ускорений вектор нормального ускорения точки В кривошипа АВ. Из произвольной точки π — полюса плана ускорений проводим вектор πb параллельно звену АB в направлении от точки B к точке A. Построение плана ускорений группы Ассура II класса 1-го вида (звенья 2 и 3) производим согласно векторному уравнению:  где Его масштабная величина равна 17,16 мм на плане ускорений. На плане ускорений через точку π проводим прямую, параллельную оси звена AB, и откладываем на ней в направлении от точки B к точке A отрезок πb = 68,4 мм. Через конец этого вектора проводим прямую, параллельную, а потом перпендикулярную к оси звена ВC. Затем через полюс π проводим прямую, параллельную, а потом перпендикулярную оси CD. Точка пересечения этих прямых определит конец вектора πc. Точку S2 на плане ускорений находим по правилу подобия, пользуясь соотношением отрезков. Для положения №1 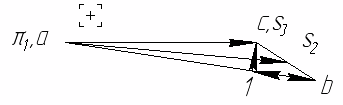 Для положения №2 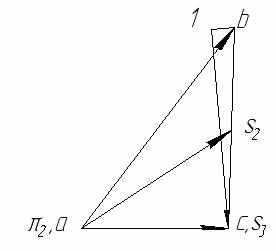 Для положения №3 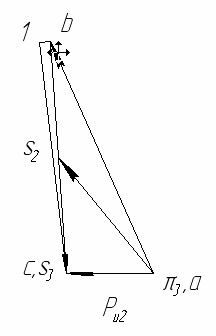 Для положения №4 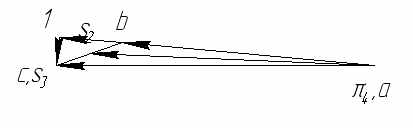 Для положения №5 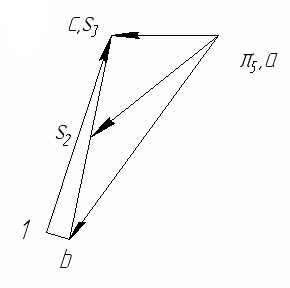 Для положения №6 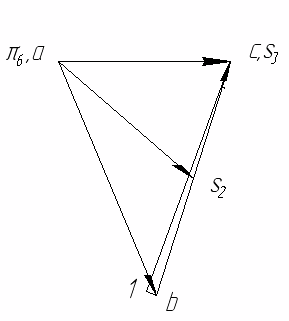 Численное значение ускорений точек звеньев сведем в таблицу 3. Таблица 3. Ускорения точек звеньев механизма
Определяем угловые ускорения ε2звена 2, Положение №1 Положение №2 Положение №3 Положение №4 Положение №5 Положение №6 Для определения направления углового ускорения ε2 мысленно переносим вектор 1с с плана ускорений в точку С звена ВС. Считая точку В неподвижной, замечаем, что поворот звена будет против часовой стрелки. Численное значение угловых ускорений сведем в таблицу 4. Таблица 4
1.6. Кинематические диаграммы точки D ползуна 3 График отстояний. Для построения графика отстоянии точки D ползуна откладываем на оси абсцисс отрезок х = 180 мм, изображающий период Т одного оборота кривошипа, и делим его на 6 равных частей. От точек 0, 1, 2,..., 6 откладываем ординаты 1 — 1*, 2—2*, ..., 6 — 6*. соответственно равные расстояниям 0—1, 0—2, ..., 0—6, проходимые точкой D от начала отсчета. Вычисление масштабов графика отстояний. Так как ординаты графика отстояний равны расстояниям, измеренных на планах механизма, то масштаб графика будет равен масштабу схемы механизма, т.с. График скоростей. Строится графическим дифференцированием графика отстояний по методу хорд. Он заключается в следующем: Криволинейные участки графика отстояний заменяем хордами 0*—1*, 1*—2* … 6*—6*. Намечаем прямоугольные оси v и t. Ось t продолжаем влево от оси ординат. Выбираем произвольной длины полюсное расстояние Н. В нашем случае 20 мм. Из полюса р проводим наклонные прямые р—1’, р—2' … р—6', параллельные хордам 0*—1*, 1*—2*, 6*6*. Из середины интервалов 0—1, 1—2 6 — 6 проводим перпендикуляры к оси абсцисс (штриховые линии). Из точек 1’, 2', .... 6' проводим параллельные оси абсцисс до пересечения с соответствующими перпендикулярами. Получаем точки 1", 2", .... 6 . Соединяем их плавной кривой. Масштаб графика скоростей: График ускорений. Строится аналогично графику •скоростей. Масштаб его по оси ординат равен: 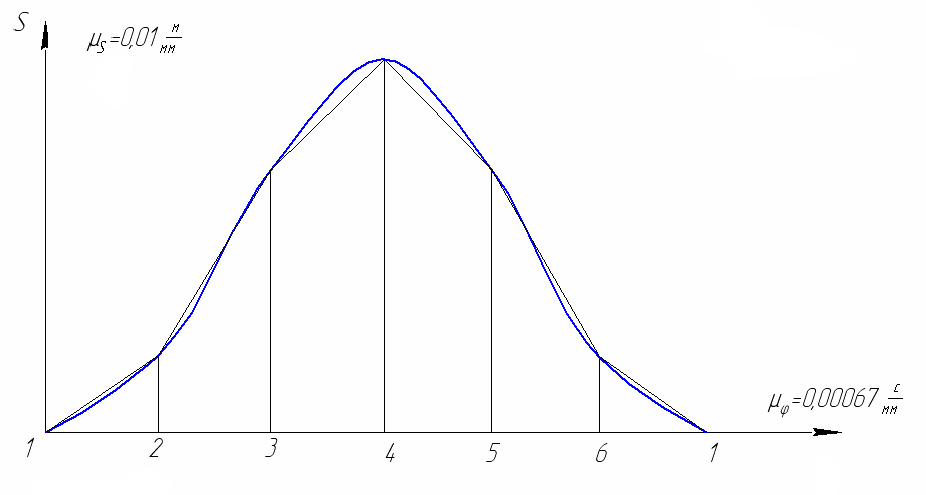 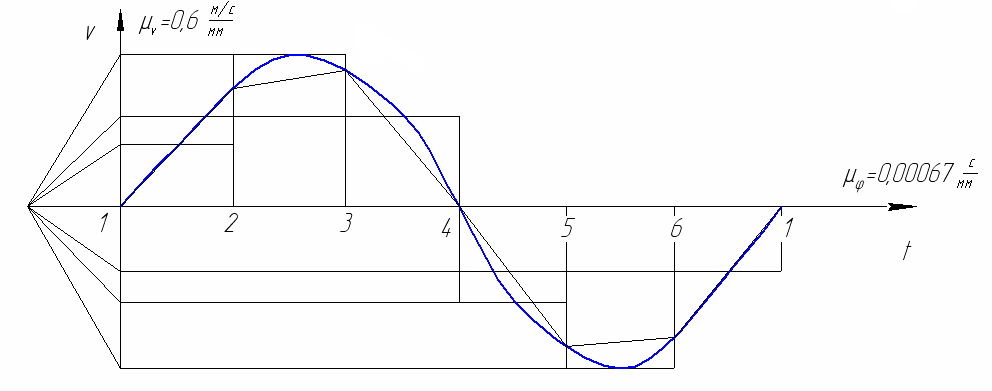 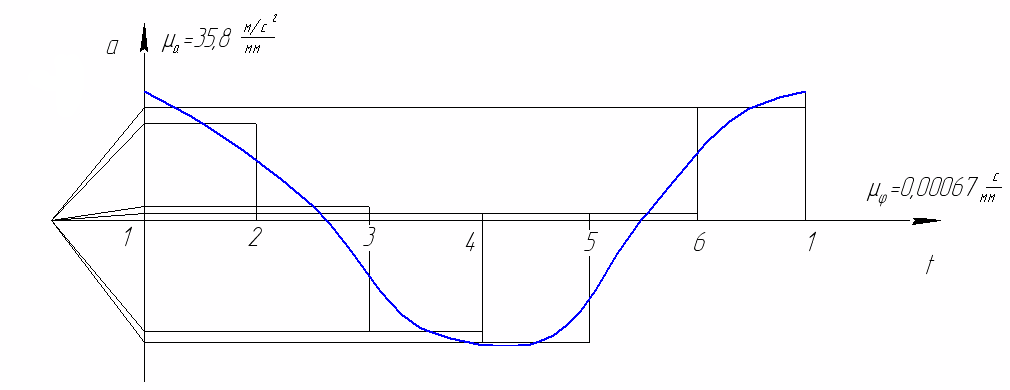 1.7. Расчет скоростей и ускорений ползуна методом Зиновьева. Это аналитический метод. Зависимости для расчета следующие. 1. 2. 3. 4. 5. 6. Рассчитываем по вышеприведенным формулам для каждого положения механизма и сводим полученные данные в таблицу и сравниваем два метода. Метод Зиновьева. Положение 1.  Метод Зиновьева. Положение 2.  Метод Зиновьева. Положение 3.  Метод Зиновьева. Положение 4.  Метод Зиновьева. Положение 5.  Метод Зиновьева. Положение 6.  | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||