Домашнее задание по механике. Кинематический анализ сложного эпициклического зубчатого механизма
 Скачать 70.31 Kb. Скачать 70.31 Kb.
|

|
Министерство образования и науки Российской Федерации Омский государственный технический университет Кафедра «Машиноведение» ДОМАШНЕЕ ЗАДАНИЕ Тема: «Кинематический анализ сложного эпициклического зубчатого механизма» Дисциплина: «Прикладная механика» Вариант 12/И Автор работы ЛобачА.В. Подпись дата Фамилия И.О. Руководитель РязанцеваИ.Л. Подпись дата Фамилия И.О Омск 2019 Оглавление ВВЕДЕНИЕ 4 ОПРЕДЕЛЕНИЕ ЧИСЕЛ ЗУБЬЕВ КОЛЕС 5 ОПРЕДЕЛЕНИЕ ЧАСТОТЫ ВРАЩЕНИЯ ВОДИЛА 6 Аналитический расчет 6 Графический расчет механизма 8 Построение плана линейных скоростей 9 Построение плана частот вращения 9 Определение погрешностей 10 Расчет количества сателлитов 10 ЗАКЛЮЧЕНИЕ 11 Список литературы 12 Кинематический расчет сложного зубчатого механизма Задание 12 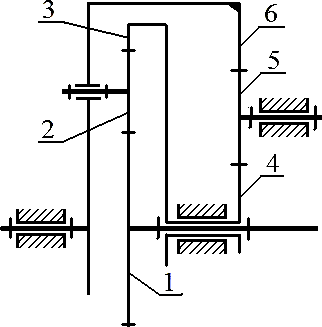 По условию соосности определить числа зубьев колес, отмеченных в таблице вопросительным знаком. Графическим и аналитическим методами вычислить частоту враще- ния n6 барабана (колесо 6). По условию соседства определить количество сателлитов 2.
ВВЕДЕНИЕМеханизм – это искусственно созданная система, предназначенная для преобразования движений одних звеньев в требуемые движения других. В расчетно-графической работе было выполнено кинематическое исследование зубчатого механизма. Расчет выполнен двумя методами: графическим и аналитическим. ОПРЕДЕЛЕНИЕ ЧИСЕЛ ЗУБЬЕВ КОЛЕСДля определения 𝑍1 и 𝑍4 воспользуемся условием соосности: Колеса 2 и 3 будут соосны, если 𝑍1 + 𝑍2 = 𝑍3 − 𝑍2 Из этого уравнения следует, что 𝑍1 = 𝑍3 − 2𝑍2 = 64 − 2 ∙ 17 = 64 − 34 = 30. Для определения 𝑍4 воспользуемся условием соосности колес 5 и 6: 𝑍4 = 𝑍6 − 2 ∙ 𝑍5 = 72 − 2 ∙ 11 = 72 − 22 = 50. ОПРЕДЕЛЕНИЕ ЧАСТОТЫ ВРАЩЕНИЯ ВОДИЛААналитический расчетИз схемы механизма видно, что частота вращения водила Н и колеса 6 одинаковы (𝑛𝐻 = 𝑛6). Составим таблицу действительных и приобретенных скоростей для преобразованного механизма: Таблица 1
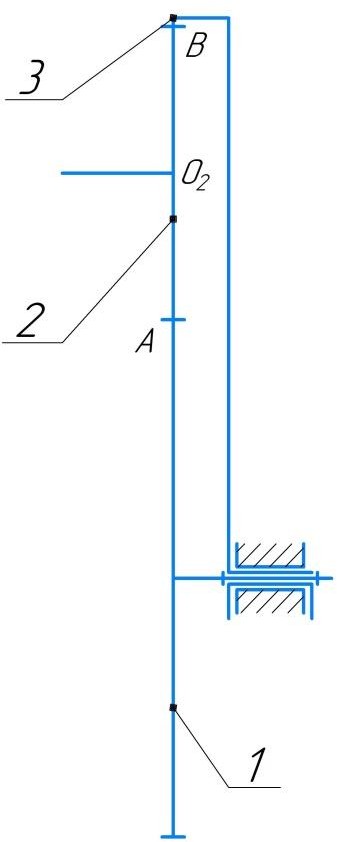 Найдем передаточное отношение 1 колеса к 3: Найдем передаточное отношение 1 колеса к 3:i(Н) = n1−n6 = − Z3   (1) Составим таблицу действительных и приобретенных скоростей для преобразованного механизма: Таблица 2
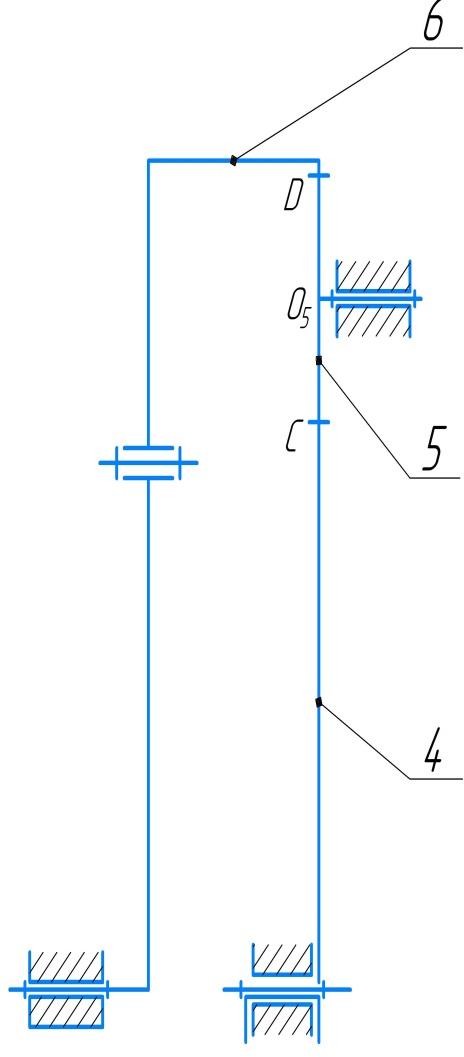 Найдем передаточное отношение 4 колеса к 6: Найдем передаточное отношение 4 колеса к 6:i = n4 = − Z5∙Z4   = − Z6 (2) 46 n6 Z4∙Z5 Z4 Рис. 1.2 Кинематическая схема преобразованного механизма Как видно из схемы механизма частота вращения колес 2 и 4 одинакова: 𝑛3 = 𝑛4 Выразим из уравнения (1) 𝑛 : n = − Z1 ∙ (n − n ) − n  3 3 Z3 1 6 6 Так же из уравнения (2) выразим 𝑛 : 𝑛 = − 𝑍6 ∙ 𝑛  4 4 𝑍4 6 Так как левые части равны, то приравняем правые: − Z1 ∙ (n − n ) − n = − Z6 ∙ n (3) Z3 1 6 6 Z4 6 Выразим из уравнения (3) 𝑛6: 𝑛 = 𝑛1 2000  = == 322.30 об/мин  6 𝑍3 ∙ 6 𝑍3 ∙ 1 + 𝑍6 + 1 64 ∙ 1 + 72 + 1 𝑍1 ( 𝑍4) 30 ( 50) Частота вращения водилы, расчитанная аналитическим способом: 6 nаналит. = 322.30 об/мин Графический расчет механизмаВычислим радиусы делительных окружностей 𝑟𝑖 всех колес механизма по формуле:  r = m ∙ zi i 2 r = m ∙ zi i 2r1 = 12 ∙ 30  2 = 180 мм 2 = 180 ммr2 = 12 ∙ 17 2 = 102 ммr3 = 12 ∙ 64 = 384 мм2 r4 = 12 ∙ 50 2 = 300 ммr5 = 12 ∙ 11 2 = 66 ммr6 = 12 ∙ 72 2 = 432 ммРассчитаем масштабный коэффициент для построения кинематической схемы механизма: 𝜇 = 𝑟6 = 432 = 4 мм    𝑟 𝑟̅6 108 мм Занесем все значения радиусов делительных окружностей в таблицу 3 Таблица 3
Построение плана линейных скоростейРассчитаем скорость для точки D: 𝑉𝐷 = 𝜔1 ∙ 𝑟6 ω = π ∙ n1 = 3.14 ∙ 2000 = 209.3 c−1  1 30 30 м м  VD = 209.3 ∙ 0.432 = 90.4 c ≈ 90 с VD = 209.3 ∙ 0.432 = 90.4 c ≈ 90 сРассчитаем масштабный коэффициент для построения плана скоростей: 𝜇 = 𝑉𝐷 = 90 = 3 м/с    𝑉 ̅𝑉̅𝐷̅ 30 мм Построение плана частот вращения Рассчитаем масштабный коэффициент для построения плана частот вращения:  𝜇 = 𝑛1 𝜇 = 𝑛12000 об/мин = = 40   𝑛 ̅𝑝̅̅ℎ̅ 50 мм Рассчитаем частоту вращения водилы 𝑛𝐻: 𝑛𝐻 = ̅𝑝̅̅ℎ̅ ∙ 𝜇𝑛 = 8.05 ∙ 40 = 322 об/мин Частота вращения водилы, рассчитанная графическим способом: 𝐻 𝑛Граф. = 322 об/мин Определение погрешностейОпределим погрешность расчетов: ∆𝑛𝐻 𝑛Аналит. − 𝑛Граф. 𝑛 = | 𝐻𝐻 ∙ 100% ≤ 10%| Аналит. 𝐻 Δ𝑛Н = | 322.30 − 322  322.30 | ∙ 100% = 0.093 ≤ 10% 322.30 | ∙ 100% = 0.093 ≤ 10%Расчет количества сателлитовДля расчета количества сателлитов воспользуемся формулой: 𝑠𝑖𝑛 180°  𝑘 > 𝑘 >𝑍2 + 2 ∙ ℎ∗  𝑎 𝑍1 ± 𝑍2  180° 180°180° 180° 180°    𝑘 < 𝑘 <𝑍 + 2 ∙ ℎ∗ =  17 + 2 ∙ 1 = arcsin(0.404) = 23°49′ ≈ 7.55 arcsin ( 2 𝑍1 + 𝑍2 𝑎) 𝑎𝑟𝑐𝑠𝑖𝑛 ( 30 + 17 ) Так как 𝑘 < 7.55, то принимаем k=7. ЗАКЛЮЧЕНИЕВ данной работе был выполнен кинематический расчет зубчатого механизма. Расчет выполнен аналитическим и графическим методами. Построены планы скоростей и частот вращения. Погрешность проведенного расчета составляет 0,093%, что свидетельствует о правильности выполнения расчета. По условию соседства определено количество сателлитов для 2 колеса 𝑘 = 7. Список литературыРязанцева И.Л. Схемный анализ и синтез механизмов и машин. Учебное пособие. Омск, изд-во ОмГТУ, 2017. Артоболевский И. И. Теория механизмов и машин. Учебник для вузов - М.: Наука, 1988. Тимофеев Г.А. Теория механизмов и машин : учебник и практикум для прикладного бакалавриата / Г.А. Тимофеев. — 3-е изд., перераб. и доп. — Москва : Издательство Юрайт, 2018. – 368 с. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||