Лекция ТТДНГ. ЛЕК РУС (1). Конспект лекций по дисциплине Технология и техника добычи нефти и газа Образовательная программа 6В07203 Нефтегазовое дело
 Скачать 3.34 Mb. Скачать 3.34 Mb.
|

Лекция 5. Механический привод штанговых скважинных насосных установокТипы механических приводов Наибольшее распространение в промышленности получили механические приводы скважинного насоса. Известны индивидуальные механические приводы и групповые приводы для эксплуатации нескольких скважин. Приводы первого типа включают двигатель, трансмиссию – преобразующий механизм и обеспечивают движение только одной колонны насосных штанг. В настоящее время почти все приводы ШСН относятся к этому типу. Приводы второго типа служат для эксплуатации группы (240) скважин, расположенных близко друг от друга и имеющих сопоставимые параметры. В индивидуальном механическом приводе трансмиссия уменьшает частоту вращения вала двигателя до числа оборотов, соответствующего числу двойных ходов точки подвеса штанг. По видам преобразующих элементов механические приводы делятся на 2 группы: балансирные и безбалансирные. В первых – возвратно-поступательное движение точки подвеса штанг достигается использованием качающегося рычага-балансира, который соединяется с выходным валом трансмиссии посредством кривошипно-шатунного механизма. В безбалансирных приводах возвратно-поступательное движение точки подвеса штанг обеспечивается за счет использования механизмов с гибкими элементами (канаты или цепи). Балансирные станки - качалки Станки - качалки с двуплечным балансиром выполняются по кинематической схеме  Кинематическая схема станка-качалки с двуплечным балансиром при этом опора балансира ( ) находится между точками подвеса штанг ( ) и сочленения балансира с шатуном ( ). Механические балансирные станки - качалки снабжаются грузовым или пневматическим уравновешивающим устройством. Существуют следующие способы размещения уравновешивающего груза: на балансире, на кривошипе, на балансире с кривошипом, на шатуне. Соответственно приводы называют: станки – качалки с балансирным, роторным, комбинированным и шатунным уравновешиванием. Действующими в настоящее время стандартами предусмотрено изготовление станков-качалок первых трех типов. 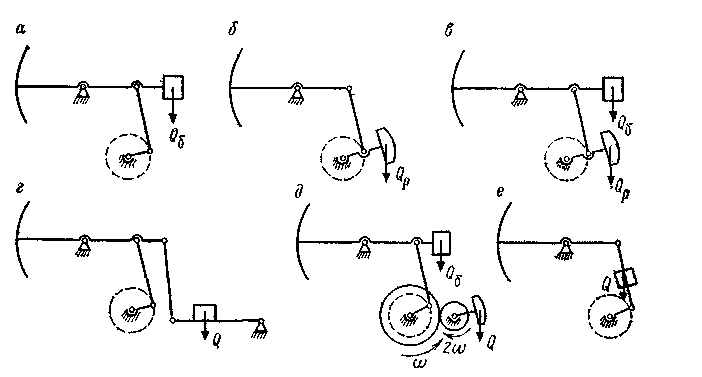 Способы механического уравновешивания двуплечных балансирных станков-качалок: а — балансирное уравновешивание; б — кривошипное (роторное) уравновешивание; в — комбинированное уравновешивание; г — уравновешивание с помощью ложной качалки; д —уравновешивание противовесом, вращающимся с двойной частотой; е —шатунное уравновешивание Станки-качалки с одноплечным балансиром выполняются по кинематической схеме на которой расположена опора ( ) на закрепленном конце балансира, а точки соединения шатуна с балансиром ( ) – между соединением штанг с балансиром и опорой. 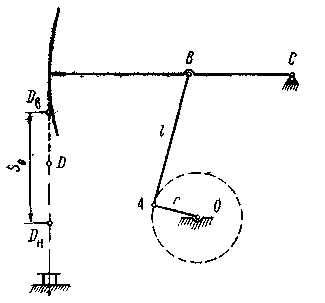 Кинематическая схема станка-качалки с одноплечным балансиром Станки-качалки с одноплечным балансиром уравновешиваются грузовым или пневматическим аккумулятором. В первом случае груз может монтироваться на балансире, кривошипе или одновременно на балансире и кривошипе. Пневматическое уравновешивающее устройство выполняется в виде моноблока – пневмоцилиндрический гидрозатвор, рессивер, компрессор, масляный насос, КИП. В нашем хозяйстве станки-качалки с одиночным балансиром распространения не получили. В используемых конструкциях установок сочленение балансира с устьевым штоком колонны штанг обеспечиваются канатной подвеской, взаимодействующей с дуговой головкой.  Способы механического уравновешивания одноплечных балансирных станков-качалок а — балансирное уравновешивание; 6 — кривошипное уравновешивание (роторное); в — комбинированное уравновешивание Безбалансирные механические приводы Наиболее близкой к таким установкам является станок-качалка в котором балансир и шатун заменяются канатом, переброшенным через шкив, причем один конец его соединяется с кривошипом, а второй – с устьевым штопом. Кривошипы безбалансирных станков-качалок имеют V-образную форму, обеспечивающую уравновешивание привода. 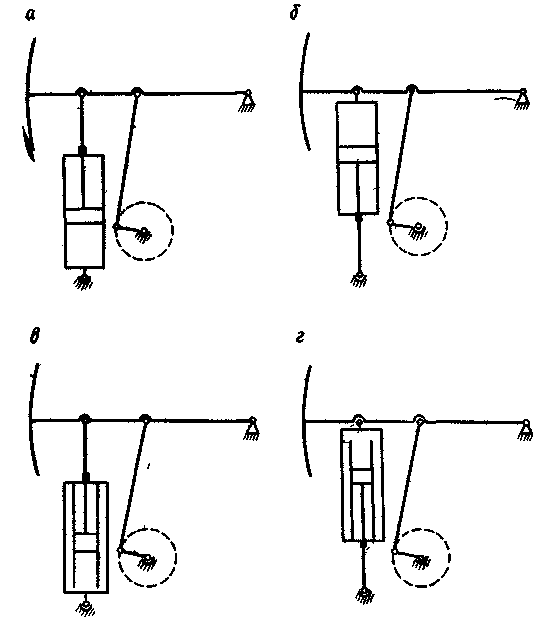 Способы пневматического уравновешивания балансирных станков –качалок а – с подвижным поршнем без гидравлического затвора; б – с подвижным цилиндром без гидравлического затвора; в – с подвижным поршнем и гидравлическим затвором; г – с подвижным цилиндром с гидравлическим затвором.  Безбалансирный станок – качалка  Безбалансирный длиноходовой станок – качалка Особенности кинаметики балансирного станка - качалки Механическая трансмиссия и четырехзвенный преобразующий механизм предопределяют однозначную связь между законами движения ведущего и ведомого звеньев. При этом каждое положение точки подвеса штанг характеризуется вполне определенными скоростями и ускорениями, которые зависят только от размеров или же от соотношения размеров отдельных звеньев трансмиссии, преобразующего механизма. К кинематическим особенностям станка-качалки относится влияние направления вращения кривошипа на скорости и ускорения точки подвеса штанг. при повороте кривошипа на один и тот же угол по часовой или против часовой стрелки ускорения различны и в первом случае меньше, чем во втором. Отечественные станки-качалки выпускаются с соблюдением условия Vвн=Vн.. Усилия действующие в точке подвеса штанг станка-качалки В процессе работы ШСНУ в точке подвеса штанг действуют постоянные и переменные нагрузки. Постоянные: Вес колонны штанг в жидкости – РШ. Гидростатическая нагрузка –РЖ обусловленная разницей давлений жидкости над и под плунжером скважинного насоса. Переменные: Инерционная нагрузка РИ обусловленная переменной по величине и направлению скоростью движения колонны штанг. Вибрационная нагрузка РВИБ обусловленная колебательными процессами в колонне штанг под действием ударного приложения и снятия гидростатической нагрузки РЖ на плунжер. Силы трения, возникающие в результате взаимодействия колонны штанг и НКТ-РТР М; обтекания пластовой жидкостью колонны штанг РТР Г; взаимодействия плунжера и цилиндра скважинного насоса РТР ПЛ; перепада давления в клапанах насоса РКЛ обусловленного их гидравлическим сопротивлением. Все эти силы изменяются в течении одного цикла работы. В общем виде усилия в точке подвеса штанг при её ходе вверх РВ и вниз РН будут: РВ =РШ +РЖ +РИВ +РВИБВ +РТР М + РТР Г +РТРПЛ + РКЛВ РН =РШ –(РИН +РВИБН +РТР М + РТР Г +РТРПЛ + РКЛН) Уравновешивание балансирных станков качалок Основное назначение уравновешивающего устройства – накопление потенциальной энергии при ходе штанг вниз и отдаче её при ходе вверх. Потенциальная энергия превращается в работу, которая вместе с работой, совершаемой приводным двигателем, расходуется на перемещение точки подвеса штанги вверх. Задача уравновешивания привода скважинного насоса сводиться к определению таких параметров уравновешивающего устройства, которые в зависимости от условий работы установки позволили бы создать оптимальный режим работы двигателя и обеспечили бы приемлемые энергетические показатели установки. Балансированный станок-качалку уравновешивают грузами, устанавливаемыми на балансире или кривошипе. При выборе масс грузов в качестве критерия уравновешенности принимают следующие условия. Работа, совершаемая двигателем при ходе штанг вверх и вниз, в течении двойного хода, постоянна: UВ=UН UВ=(РЖ+РШ)S - GS UН =-РШS+GS Приравняв правые части выражений, получим: G=(РЖ+РШ)/2 где G – вес уравновешивающего груза. Таким образом, вес уравновешивающего груза должен быть равен сумме весов колонны штанг в жидкости и половине веса столба пластовой жидкости, находящейся над плунжером скважинного насоса. Мощность привода балансирного станка-качалки. Мощность двигателя обусловлена, прежде всего, полезной работой по подъему пластовой жидкости, совершаемой в единицу времени. Эту работу определяем: при ходе штанг вверх UВ =(РЖ+РШ)S при ходе штанг вниз UН =-РШS Полезная работа за двойной ход: U= РЖS Вес столба жидкости над плунжером скважинного насоса пропорционален площади его плунжера, поэтому затрачиваемая мощность будет: N=Hd2nS где n – число двойных ходов балансира в минуту; H – высота подъема жидкости; d– диаметр плунжера. Штанговые насосные установки с гидроприводом Одной из основных тенденций развития штанговых скважинных установок является увеличение длины хода точки подвеса штанг, что улучшает основные показатели установки, её долговечность и подачу. Однако увеличение длины хода различным образом влияет на изменение параметров её отдельных элементов: привода, колонны штанг, труб, скважинного насоса, устьевого оборудования. Гидравлический привод может состоять из следующих блоков: силового органа, уравновешивающего устройства, блока привода с коммутирующим устройством, систем компенсации утечек реверсирования. Силовой орган соединяется колонной штанг со скважинным насосом. В гидроприводных установках используются те же способы уравновешивания, что и в механических. Принципиально эти установки отличаются способом передачи энергии от двигателя к силовому органу и уравновешивающему устройству. В гидроприводных установках в качестве силового органа – узла для перемещения штанг, используют гидравлические цилиндры, а реже резервные гидромоторы. Уравновешиваюшее устройство аккумулирует потенциальную энергию либо поднимаемого груза, либо сжатого газа, либо колонны штанг соседней скважины или кинетическую энергию маховика. Блок привода обычно представляет собой двигатель, соединенный с валом силового насоа, объемного или гидродинамического действия. В непосредственной близости от него распределитель переключающий потоки рабочей жидкости от силового насоса к силовому органу в периоды его реверсирования или остановки. В гидроприводе ШСН используются гидросхемы трех типов: открытая, закрытая и комбинированная. В приводе с открытой гидросхемой бак с рабочей жидкостью находится под атмосферным давлением. В приводе с закрытой гидросхемой бак с рабочей жидкостью находится под давлением, соизмеримым с рабочим давлением насоса. В приводе с комбинированной схемой часть узлов и аппаратов находится под постоянным давлением, обусловленным давлением сжатого газа в аккумуляторе, а часть под атмосферным давлением.силовым блоком управляет система реверсирования – либо гидравлическая, либо механическая. Установки с пневматическим уравновешиванием и закрытой схемой гидропривода Установки, с использованием в качестве уравновешивающего устройства гидропневматического аккумулятора, выполняются с гидроприводом по закрытой или комбинированной схемам. Гидроприводные установки с закрытой схемой включают силовой орган – гидроцилиндр ( ), пневматический аккумулятор ( ), блок привода – силовой насос ( ) и распределительный золотник ( ), гидродавленческую систему реверсирования состоящую из кранов ( ), обратных клапанов ( , ) и регулируемого дросселя ( ), подключенного к золотнику ( ).  Установкас закрытой гидравлической схемой Установка работает следующим образом: при начальном положении поршня давление в полости золотника ( ) близко к атмосферному и жидкость направляется из аккумулятора на прием насоса и далее в нижнюю часть силового цилиндра. Поршень цилиндра вместе с колонной штанг перемещается вверх до тех пор, пока не пройдет мимо одного из верхних окон цилиндра, кран которых открыт. При этом жидкость из под поршневой полости через открывшийся верхний обратный клапан и дроссель поступает в золотник. Жидкость начинает поступать из цилиндра в аккумулятор. Ход цилиндра вниз будет продолжаться до тех пор, пока нижнее управляющее окно не соединится с надпоршневой полостью, после чего описанный процесс повторится. Следует отметить, что простота этих установок кажущаяся, поскольку они должны включать в себя, кроме собственно гидропривода, системы компенсации утечек рабочей жидкости и стабилизации давления воздуха, каждая из которых состоит из целого набора механизмов, систем и аппаратов. Установка с пневматическим уравновешиванием и комбинированной гидросхемой Установка включает силовой орган – гидроцилиндр ( ), шток которого соединен с колонной штанг. Его нижняя полость соединена с верхней полостью верхнего промежуточного цилиндра ( ), а подпоршневая полость последнего с газовым аккумулятором ( ). Полости нижнего промежуточного цилиндра через силовой распределитель ( )попеременно соединяются с силовым насосом ( ) и баком ( ).  Установка с комбинированной схемой Установка работает следующим образом: система реверсирования управляет силовым насосом, обеспечивая необходимую подачу жидкости и направление штока. При подходе к крайним положениям направление потока жидкости изменяется на противоположное. Давление азота в камере( ) подбирается таким, чтобы нагрузка на двигатель при ходе штанг вверх и вниз была бы постоянной. Несмотря на ряд недостатков: сложность конструкции, значительные габариты и массу, неудобства в обслуживании – установки с пневматическим уравновешиванием имеют боле высокие показатели чем балансирные, прежде всего заключающиеся в увеличении длины хода точки подвеса штанг. разработка и накопленный опыт эксплуатации этих установок позволили перейти к созданию компактного объемного гидропривода ШСН. Установка с грузовым уравновешиванием В установках с грузовым уравновешиванием в качестве аккумулятора энергии используется груз. Установка включает ферму, в верхней части которой располагается шкив ( ) с перегнутым через него канатом (или цепью). Шкив приводится в действие высокомоментным резервным гидромотором ( ), рабочая жидкость к которому поступает от силового насоса ( ) через распределитель ( ).  Установка с грузовым уравновешиванием Установки с взаимным или групповым уравновешиванием. Установки этого класса предназначены для привода ШСН, спущенных в расположенные рядом скважины с близкими параметрами. На устье одной из скважин располагается силовой орган – цилиндр и силовой блок, на устье второй – только гидроцилиндр, служащий уравновешивающим устройством.  Привод с групповым уравновешиванием Нижнее полости цилиндров ( ) и ( ) соединены трубопроводом и представляют замкнутый объем, количество жидкости в котором постоянно пополняется насосом ( ) системы компенсации утечки из бака ( ). Во время работы установки рабочая жидкость насосом ( ) через золотник ( ), направляется в верхние полости цилиндров ( ), ( ). Направления движения поршней регулируются системой реверсирования. При ходе левого поршня вверх – правый двигается синхронно вниз. К достоинствам группового привода следует отнести возможность получения больших длин ходов точек подвеса штанг. к недостаткам – необходимость скважин с одинаковыми параметрами, снижение КПД установки при увеличении расстояний между скважинами и высокую металлоемкость в следствии массы трубопроводов. Установки с динамическим уравновешиванием. В качестве уравновешивающего устройства применяется маховик. При движении штанг вверх энергия для подъема столба жидкости и колонны штанг подводится от электродвигателя и маховика. При ходе штанг вниз потенциальная энергия штанг посредством гидропривода передается маховику, который её запасает. Помимо этого при ходе штанг вниз эл. двигатель так же передает свою энергию маховику. 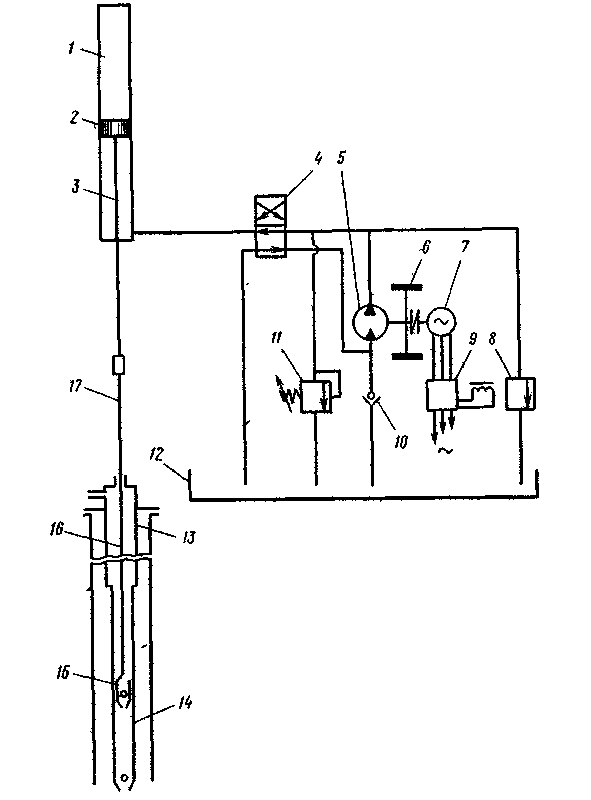 Привод с инерционным уравновешиванием Неуравновешенные установки. Неуравновешенный привод ШСН характерен отсутствием уравновешивающего устройства. Это означает, что при ходе штанг вверх мощность двигателя затрачивается на подъем колонны штанг и столба жидкости, при ходе вниз двигатель работает вхолостую, а потенциальная энергия превращается в тепло. 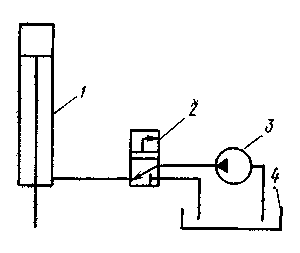 Неуравновешенный привод Гидроприводная штанговая насосная установка с уравновешиванием колонной насосных труб. Особое место среди гидроприводных установок занимают приводы с использованием колонны НКТ в качестве уравновешивающего груза, для чего колонна подвешивается к уравновешивающему цилиндру. Принципиальная схема установки обеспечивает компоновку всех узлов в виде моноблока, что в итоге исключает необходимость фундамента. Принцип работы установки следующий: подаваемая насосом из бака жидкость через распределитель направляется попеременно в верхние полости штангового и трубного цилиндров. В результате поршни перемещают колонны штанг в противоположных направлениях. Сумма абсолютных перемещений штанг и труб соответствует ходу штанг относительно труб, т.е. плунжера относительно цилиндра скважинного насоса. Уравновешивание установки достигается подбором такого соотношения длин ходов поршней цилиндров, при котором загрузка двигателя при ходе штанг вверх и вниз будет постоянной.  Схема установки с использованием НКТ в качестве уравновешивающего груза Особенности кинематики и динамики уравновешивания установок с гидроприводом. Как отмечалось, особенностью гидропривода является отсутствие жесткой кинематической связи ведущего звена с точкой подвеса штанг. это приводит к тому, что скорости и ускорения перестают зависеть от положения точки подвеса штанг. эти же особенности характерны и для длинноходовых безбалансирных приводов. Особенности кинематики движения точки подвеса штанг заключаются прежде всего в наличии фаз установившегося движения, длительность которых достаточно велика в общем балансе времени двойного хода, приводящих к исчезновению в этот период инерционных усилий в точке подвеса штанг. уравновешивание гидроприводных установок необходимо для обеспечения эксплуатации установки с двигателем минимально возможной мощности. Расчет уравновешивания гидроприводных установок заключается в определении параметров уравновешивающего устройства (давления в аккумуляторе, момента инерции маховика и т.д.) при котором будет обеспечен необходимый режим работы приводного двигателя. Уравновешенность установки достигается изменением соотношения ходов точек щтанг, подвеса и труб, т.е. соотношением эффективных площадей поршней штангового и трубного цилиндров, либо изменением плотности элементов внутрискважинного оборудования. Мощность приводного двигателя установок. Мощность привода определяется полезной работой, производимой установкой в единицу времени, особенностями закона изменения усилия на ведомом звене преобразующего механизма, КПД наземной и подземной части установок. При гидроприводе штанговых скважинных насосов мощность приводного двигателя определяется: N=Q*P/нп где нип – КПД наземной и подземной части установки; Q – подача силового насоса гидропривода; P – давление развиваемое силовым насосом при совершении полезной работы по подъему пластовой жидкости. Величины Q и P определяются расчетным способом.Расчет и конструирование гидроприводных установок. Расчет и конструирование главных узлов установки проводится на основе окончательно принятых их параметров и характеристик. Он включает в себя выполнение гидравлических и прочностных расчетов, определение размеров отдельных деталей, входящих в узлы, при которых будет обеспечена их характеристика. Литература: Молчановы «Машины и оборудование для добычи нефти и газа». |