аВТОМАТИЧЕСКИЕ СИСТЕМЫ. Контр. Автоматические системы Лопухов М.В. Нтк 71 з. Контрольная работа Автоматические системы по дисциплине
 Скачать 230.29 Kb. Скачать 230.29 Kb.
|

|
Министерство науки и высшего образования Российской Федерации Рубцовский индустриальный институт (филиал) федерального государственного бюджетного образовательного учреждения высшего образования «Алтайский государственный технический университет им. И.И.Ползунова» Факультет Технический Кафедра «Наземные транспортные системы» Контрольная работа Автоматические системы по дисциплине______________________________________________________________ наименование дисциплины _________________________ обозначение документа Студент группы Лопухов М.В. инициалы, фамилия Преподаватель Курсов должность, ученое звание инициалы, фамилия Рубцовск 20__г. Оглавление. Введение ----------------------------------------------------------------стр. 3. Принцип регулирования сопротивления амортизатора -------стр. 4. Управления исполнительными механизмами -------------------стр. 6. Виды регулирования подвески -------------------------------------стр. 7. Список литературы ---------------------------------------------------стр. 11. Введение. Система автоматического управления подвеской позволяет повысить не только комфортабельность автомобиля для водителя и пассажиров при езде, но и безопасность движения. Это достигается за счет введения в подвеску исполнительных механизмов, управляемых с помощью электронных устройств, которые изменяют жесткость упругих элементов и сопротивление амортизаторов, что способно уменьшить крен кузова на повороте и его продольный наклон при разгоне и торможении. Разработаны также устройства, обеспечивающие горизонтальное положение кузова при движении по неровным дорогам. Принцип регулирования сопротивления амортизатора Рассмотрим принцип регулирования сопротивления амортизатора, жесткости подвески и высоты кузова на примере одного колеса (рис. 1). 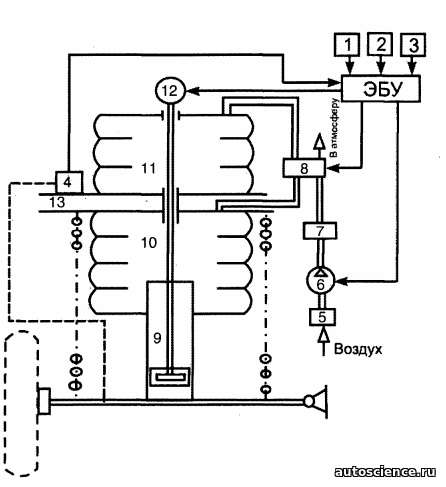 Рис. 1. Схема автоматического регулирования подвески: 1-датчик скорости; 2-датчик ускорения; 3-датчик угловой скорости относительно вертикальной оси; 4-датчик положения кузова автомобил; 5-фильтр; 6-компрессор с приводом; 7-влагоотделитель; 8-электромагнитный клапан; 9-амортизатор; 10, 11-пневмокамеры;12-электродвигатель; 13-кузов Упругий элемент расположен между кузовом автомобиля 13 и нижним рычагом подвески. Параллельно пружине подвески установлена основная пневмокамера, внутри которой (иногда вне ее) находится амортизатор 9. В кузове 13, выше основной пневмокамеры 10, расположена вспомогательная камера 11. Обе камеры соединены между собой перепускным клапаном, проходное сечение которого регулируется электромагнитным клапаном. Этот клапан связан с компрессором 6 подпитки камер воздухом через влагоотделитель 7. Атмосферный воздух поступает в компрессор 6 через фильтр 5. Регулирование жесткости подвески достигается изменением производительности перепускного клапана, а изменение высоты кузова осуществляется подкачиванием пневмокамеры от компрессора или выпуском воздуха из нее в атмосферу, что позволяет растягивать или сжимать основную пневмокамеру 10. Сопротивление амортизаторов регулируется изменением проходного сечения перепускных отверстий в поршне. Для этого в поршень вмонтирован поворотный золотник. Золотник поворачивается стержнем, соединенным с электродвигателем. ЭБУ дает команду электродвигателю повернуть золотник на необходимый угол, тем самым изменяя сопротивление амортизаторов. Электронный блок управления силой сопротивления амортизаторов выполняется на цифровых схемах (рис. 2). Все входные сигналы являются цифровыми и поступают в микропроцессор через схемы входной обработки, формирующие сигналы. Выходные сигналы ЭБУ подаются на исполнительные механизмы управления режимами работы амортизаторов и на индикаторы, показывающие уровень силы сопротивления, через схемы выходной обработки от микропроцессора. Управления исполнительными механизмами. 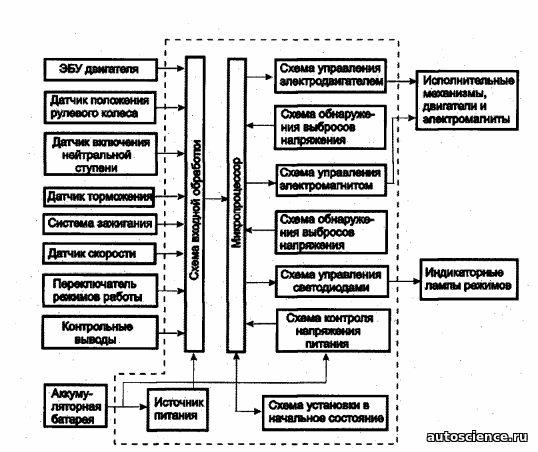 Рис1 Рис1 Структурная схема ЭБУ силой сопротивления амортизаторов В схемах управления исполнительными механизмами предусматриваются средства обеспечения работоспособности при появлении ошибок от скачков напряжения и защита от перегрузки по току. Источники питания преобразуют напряжение бортовой сети в напряжение 5 В, необходимое для работы интегральных схем. Выполнение основной программы занимает приблизительно 4 мс. За это время микропроцессор обрабатывает входные сигналы от датчиков и подает выходные сигналы на исполнительные механизмы. Виды регулирования подвески. Существует 2 вида регулирования подвески: с помощью электромагнитных клапанов; с помощью магнитно-реологической жидкости; 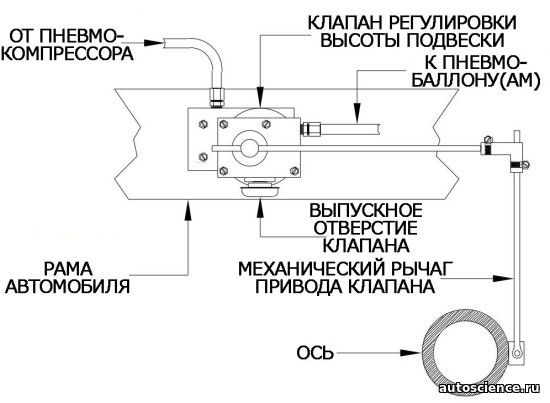 Рис. 3. Схема регулирования пневмоподвески с помощью электромагнитных клапанов  Рис. 4. Подвеска с изменяемыми характеристиками с помощью электромагнитных клапанов 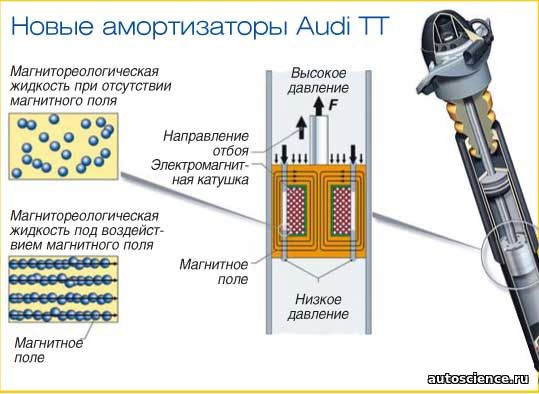 Рис. 5. Описание принципа регулирования с помощью магнитно-реологической жидкости Рис. 5. Описание принципа регулирования с помощью магнитно-реологической жидкостиПри регулировании с помощью электромагнитного регулировочного клапана (рис. 3. а и рис. 4) изменяется его проходное сечение в зависимости от величины воздействующего тока. Чем больше ток, тем меньше проходное сечение клапана и соответственно выше степень демпфирования амортизатора (жесткая подвеска). С другой стороны, чем меньше ток, тем больше проходное сечение клапана, ниже степень демпфирования (мягкая подвеска). Регулировочный клапан устанавливается на каждый амортизатор и может располагаться внутри или снаружи амортизатора. Магнитно-реологическая жидкость включает металлические частицы, которые при воздействии магнитного поля выстраиваются вдоль его линий. В амортизаторе (рис. 5), заполненном магнитно-реологической жидкостью, отсутствуют традиционные клапаны. Вместо них в поршне имеются каналы, через которые свободно проходит жидкость. В поршень также встроены электромагнитные катушки. При подаче на катушки напряжения частицы магнитно-реологической жидкости выстраиваются по линиям магнитного поля и создают сопротивление движению жидкости по каналам, чем достигается увеличение степени демпфирования (жесткости подвески). Список литературы. |