Контрольная авт. Контрольная работа автоматизация технологических процессов теоретическая часть
 Скачать 202.6 Kb. Скачать 202.6 Kb.
|

КОНТРОЛЬНАЯ РАБОТА АВТОМАТИЗАЦИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ ТЕОРЕТИЧЕСКАЯ ЧАСТЬ 4. Поясните классификацию устройств электроавтоматики по функциональному назначению. Проведем классификацию электрических аппаратов и устройств электроавтоматики ( АУ) по следующим основным признакам: 1. По уровню рабочего напряжения: а) свыше I кВ - АУ высокого напряжения; б) до I кВ - АУ низкого напряжения. 2. По функциональному назначению: а) для цепей распределения и хранения электроэнергии (автоматичес-кие выключатели, устройства контроля и защиты и т.п.); б) для систем электроавтоматики и управления (работающие в коммутационных режимах). 3. По характеру коммутации электрических цепей: а) контактные; б) бесконтактные: - полупроводниковые (транзисторные и тиристорные); - магнитные усилители и элементы на их основе. 4. По области применения: а) общепромышленные, требования к которым регламентируются ГОСТ 12434-66; б) авиационные; в) морские (брызгозащищенность, водозащищенность); г) транспортные (тяговые) ГОСТ 9219-66. 17. Приведите основные типы характеристик емкостных преобразователей перемещения. Емкостные датчики - принцип действия основан на зависимости электрической емкости конденсатора от размеров, взаимного расположения его обкладок и от диэлектрической проницаемости среды между ними. Для двухобкладочного плоского конденсатора электрическая емкость определяется выражением:С = e0eS/h, где e0 - диэлектрическая постоянная; e - относительная диэлектрическая проницаемость среды между обкладками; S - активная площадь обкладок; h - расстояние между обкладками конденсатора. Зависимости C(S) и C(h) используют для преобразования механических перемещений в изменение емкости. Емкостные датчики, также как и индуктивные, питаются переменным напряжением (обычно повышенной частоты - до десятков мегагерц). В качестве измерительных схем обычно применяют мостовые схемы и схемы с использованием резонансных контуров. В последнем случае, как правило, используют зависимость частоты колебаний генератора от емкости резонансного контура, т.е. датчик имеет частотный выход. Достоинства емкостных датчиков - простота, высокая чувствительность и малая инерционность. Недостатки - влияние внешних электрических полей, относительная сложность измерительных устройств. Емкостные датчики применяют для измерения угловых перемещений, очень малых линейных перемещений, вибраций, скорости движения и т. д., а также для воспроизведения заданных функций (гармонических, пилообразных, прямоугольных и т. п.). Емкостные преобразователи, диэлектрическая проницаемость e которых изменяется за счет перемещения, деформации или изменения состава диэлектрика, применяют в качестве датчиков уровня непроводящих жидкостей, сыпучих и порошкообразных материалов, толщины слоя непроводящих материалов (толщиномеры), а также контроля влажности и состава вещества. 30. Приведите обобщенную схему усилителя и поясните принцип усиления входных сигналов. Входной усилитель. При помощи небольшого устройства, которое будет описано ниже, легко снимаются два основных ограничения, присущих простейшим АЦП; входной диапазон от 0 до +5 В и неспособность работать с переменными напряжениями без постоянной составляющей. Например, устройство смещения нуля и усилитель с переключаемыми коэффициентами усиления 1, 10 и даже 100 сильно расширят область применения АЦП ADC 10 и того мощного программного обеспечения, которое к нему прилагается. Этот АЦП можно будет использовать даже для оцифровки звука! Подача переменного напряжения с нулевым средним значением (иными словами, без постоянной составляющей) на вход аналого-цифрового преобразователя с входным диапазоном 0-5 В приводит к эффекту однополупериодного выпрямления. В обоих случаях регулировка положения луча или установки нуля позволяет решить проблему путем добавления регулируемого постоянного напряжения смещения к входному сигналу. Хотя входной диапазон 0-5 В и подходит для решения многих задач, при измерениях с помощью 8-разрядного АЦП желательно использовать максимально возможное количество из 256 уровней, то есть нужно уложиться в последнюю треть шкалы. К примеру, входное напряжение, изменяющееся в пределах от 0 до 500 мВ, при преобразовании займет всего 25 уровней, что соответствует точности 4%, тогда как АЦП наверняка имеет точность не ниже 1%. 12-разрядные АЦП решают эту проблему, но они тоже не работают с сигналами переменного тока. С учетом простоты схем описываемых АЦП был разработан самый простой усилитель. Действительно, не нужны ни широкая полоса (достаточно нескольких килогерц), ни высокая точность (достаточно 1%), ни смещение нуля на уровне микровольт, поскольку 8-разрядный АЦП с трудом определяет разницу между величинами О В и 20 мВ. 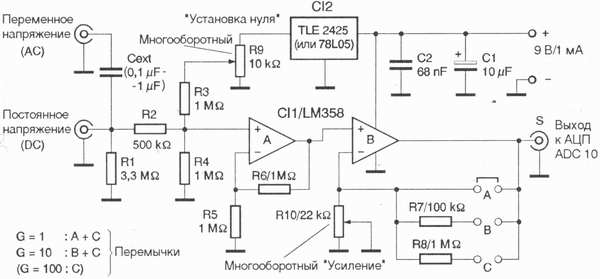 Рис. 1. Принципиальная схема входного усилителя. Не надо рассматривать схему, приведенную на рис. 1, как образец высокоточного прибора - это небольшое, но полезное устройство, предоставляющее немалые возможности. Главный компонент схемы - сдвоенный операционный усилитель LM358, разработанный очень давно и широко распространенный. Он может работать с напряжениями, очень близкими к нулю, даже без двухполярного питания. Простой девятивольтовой гальванической батарейки вполне хватит для питания описываемого устройства, которое потребляет ток не более 1 м А (500 часов непрерывной работы с новой щелочной батареей). Из напряжения питания +9 В микросхемой TLE2425 производства компании Texas Instruments формируется стабильное напряжение 2,5 В. Обычно эта микросхема используется в устройствах для получения «виртуальной земли». Хотя напряжения 2,5 В даже при единичном усилении вполне достаточно для сдвига нуля в середину рабочего диапазона 0-5 В, при отсутствии микросхемы TLE2425 допустимо применение интегрального стабилизатора 78L05. При этом параметры будут менее стабильны, а потребление тока увеличится, Расположение выводов обеих микросхем одинаково. Многооборотный потенциометр R9 с сопротивлением 10 кОм служит для подачи части выходного напряжения микросхемы TLE2425 на резисторный сумматор. На этот же сумматор поступает и входное напряжение, которое может подаваться напрямую (разъем DC - открытый вход) или через разделительный конденсатор Сех( (разъем АС - закрытый вход), как и у обычных осциллографов. Использование входа АС позволяет убрать из входного сигнала постоянную составляющую (обычно присутствующую), а затем при помощи потенциометра R9 подобрать такую ее величину, которая максимально упростит проведение измерений. Емкость неэлектролитического конденсатора Ccxt (желательно, чтобы он был рассчитан на напряжение 400 В) будет зависеть от условий измерений: величина 1 мкФ позволяет работать на очень низких частотах, а величины 0,1 мкФ достаточно для работы в звуковом диапазоне. Номиналы резисторов (с точностью 1%) были рассчитаны таким образом, чтобы первый каскад имел единичное усиление, а входное сопротивление составляло 1 МОм. Резистор с сопротивлением 500 кОм можно получить, соединив параллельно два резистора по 1 МОм каждый. Второй каскад имеет переключаемый коэффициент усиления 1, 10, 100, а многооборотный потенциометр R10 22 кОм позволяет либо точно откалибровать усиление при настройке, либо регулировать его плавно - так же, как это можно проделать при помощи обычного осциллографа, вращая ручку «Усиление плавно». Конечно, ничто не мешает использовать иные номиналы резисторов, чтобы получить другие коэффициенты усиления: 2, 5 и т.д. Для реализации коэффициента усиления 100 в цепи обратной связи операционного усилителя используется резистор с номиналом 1 МОм, для коэффициента усиления 10 - параллельное соединение резисторов 100 кОм и 1 МОм. Для реализации единичного усиления (схема повторителя) применена обычная перемычка. Чтобы обеспечить высокую точность устройства, калибровку надо проводить при коэффициенте усиления 10, так как режим «х100» используется редко и, кроме того, в этом режиме операционный усилитель LM 358 подвержен влиянию эффекта смещения нуля (которое едва ли будет скомпенсировано полностью). 43. Укажите основные преимущества и недостатки ЭМУ по сравнению с другими типами усилителей. Электромашинные усилители выпускаются серийно и нашли широкое применение в системах автоматического регулирования и автоматизированного электропривода. В системах генератор — двигатель генератор, а часто еще и возбудитель, по существу представ-,1IVIiOT собой независимые электромашинные усилители, соединенные и каскад. Наибольшее распространение получили ЭМУ поперечного поля. Эти усилители обладают рядом достоинств, главными из которых являются: 1) большой коэффициент усиления по мощности (кр=103÷105);. 2) малая входная мощность, позволяющая питать обмотки управления от электронных ламповых и полупроводниковых усилителей; 3) достаточное быстродействие, т. е. малые постоянные времени цепей усилителя. Время нарастания напряжения от нуля до номинального значения для промышленных усилителей мощностью 1-5кВтсоставляет 0,05—0,1 сек; 4) достаточные надежность, долговечность и широкие пределы изменения мощности; 5) возможность изменения характеристик за счет изменения степени компенсации, позволяющая получать необходимые внешние характеристики. К числу недостатков электромашинных усилителей следует отнести: 1) относительно большие габариты и вес по сравнению с генераторами постоянного тока той же мощности, так как для получения больших коэффициентов усиления применяется ненасыщенная магнитная цепь; 2) наличие остаточного напряжения за счет гистерезиса. Э. д. с, наводимая в якоре потоком остаточного магнетизма, искажает линейную зависимость выходного напряжения от входного сигнала в зоне малых сигналов и нарушает однозначность зависимости выходных параметров ЭМУ от входных при изменении полярности входного сигнала, ибо поток остаточного магнетизма при постоянной полярности сигнала будет увеличивать поток управления, а при изменении полярности сигнала — уменьшать поток управления. Кроме того, под действием остаточной э. д. с ЭМУ, работающий в режиме перекомпенсации, при малом сопротивлении нагрузки н нулевом входном сигнале может самовозбуждаться и терять управляемость. Это явление объясняется неуправляемым увеличением продольного магнитного потока машины, первоначально равного потоку остаточного магнетизма, за счет подмагничивающего действия компенсационной обмотки. Для нейтрализации вредного действия потока остаточного магнетизма в ЭМУ осуществляют размагничивание переменным током, а сами ЭМУ ставят в автоматические системы несколько недокомпенсированными. Следует отметить, что с внедрением магнитных усилителей применение ЭМУ в системе генератор — двигатель значительно сокращается. Однако ЭМУ находят все большее применение в системах ЭМУ — двигатель, где электромашинный усилитель используется в качестве генератора, питающего двигатель. В последние годы в результате использования промежуточных полупроводниковых усилителей значительно увеличились диапазоны регулирования и быстродействие электроприводов, работающих на системах ЭМУ—двигатель. 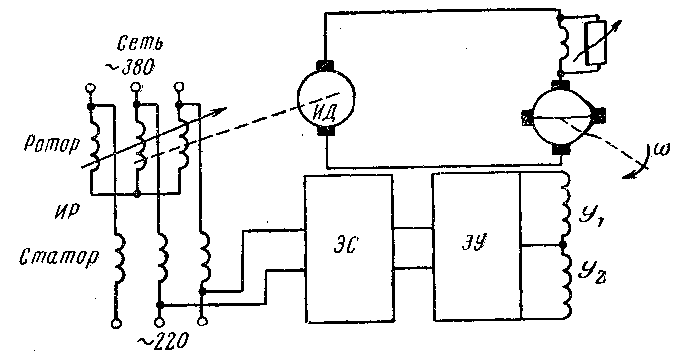 Рис. 2. Схема автоматического регулирования синусоидального напряжения Такие электроприводы применяются в различных областях, в связи с этим растет производство ЭМУ поперечного поля. Электроприводы с использованием ЭМУ мощностью до 10кВт получили в настоящее время преимущественное распространение по сравнению с другими типами приводов в станках и установках радиоэлектронной промышленности. Рассмотрим несколько примеров использования электромашинных усилителей в схемах автоматики. На рис. 2 приведена схема бесконтактной системы автоматического регулирования амплитуды си ну со ид а ль но го напряжения. Эта схема применяется на радиозаводах на участках настройки телевизоров и радиоприемников, где напряжение должно быть стабилизировано по амплитуде и синусоидально изменяться по времени. Применение феррорезонансных стабилизаторов для этих целей недопустимо, так как, поддерживая с достаточной точностью амплитуду, феррорезонансные стабилизаторы сильно искажают синусоиду. Поэтому в таких случаях применяют системы автоматической стабилизации напряжения с использованием в качестве регулирующего органа индукционный регулятор. В схеме рис. 2 нестабильное трехфазное напряжение подается на ротор индукционного регулятора ИР. Выходное стабилизируемое напряжение снимается с зажимов статора, подается на приемники и одновременно на вход элемента сравнения, где сравнивается с опорным эталонным напряжением. Сигнал рассогласования усиливается электронным усилителем ЭУ и поступает на одну из обмоток управления электромашинного усилителя — У1 или У2. В зависимости от полярности сигнала рассогласования на выходе ЭМУ появляются напряжения прямой или обратной полярности и исполнительный двигатель ИД, вращаясь, перемещает ротор индукционного регулятора в сторону уменьшения или увеличения напряжения. На рис. 3 представлена электрическая схема полуавтомата для спая стеклянного дна с металлическим конусом электроннолучевых трубок. Вид спая в этом случае несогласованный, так как коэффициент линейного расширения материала конуса (хромистая сталь) и стекла не одинаковый. Поэтому для получения хорошего спая необходимо сначала произвести разогрев стекла. Эту операцию выполняет блок нагревателей БH, температура которого контролируется термопарой T и автоматически поддерживается терморегул ирующим прибором ЭМР. Сваривание при рабочей температуре 1100—12000C производится токами высокой частоты, которые вырабатывает генератор повышенной частоты Г, питающий блок индукторов БИ. Для получения стабильного выходного напряжения генератора Г его цепь возбуждения питается от ЭМУ поперечного поля. В этой схеме ЭМУ играет роль усилителя мощности и элемента сравнения. 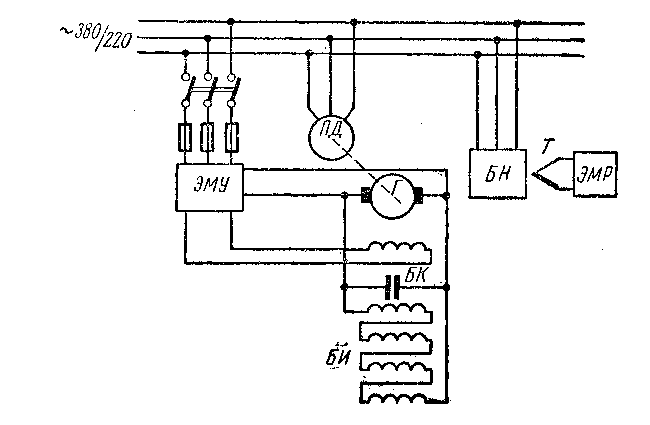 Рис. 3. Электрическая схема полуавтомата для спая стеклянного дна с металлическим конусом На рис. 2 и 3 приведены схемы использования электромашинных усилителей в системах радиоэлектронной промышленности. Аналогичных схем в различных автоматизированных системах, где в качестве усилителей мощности используются ЭМУ поперечного поля, довольно много. Использованию ЭМУ в этих схемах способствует наличие нескольких обмоток управления, что позволяет сравнивать сигналы и вводить обратные связи. Высокий коэффициент усиления повышает быстродействие таких систем. ПРАКТИЧЕСКАЯ ЧАСТЬ Контрольная работа посвящена решению задачи анализа системы автоматического регулирования расхода. Функциональная схема САР расхода представлена на рис.1. 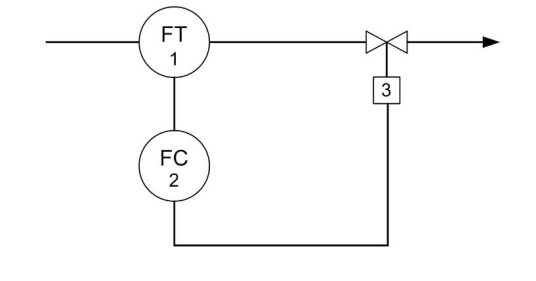 Рис.1 Функциональная схема САР расхода На рис.1 через FT (поз. 1) обозначен измерительный преобразователь расхода, через FC (поз. 2) - регулятор расхода. Позиции 3 соответствует исполнительное устройство. Объект управления представляет собой участок трубопровода от измерительного преобразователя до исполнительного устройства. Передаточные функции объекта управления, исполнительного устройства, измерительного преобразователя и регулятора имеют вид 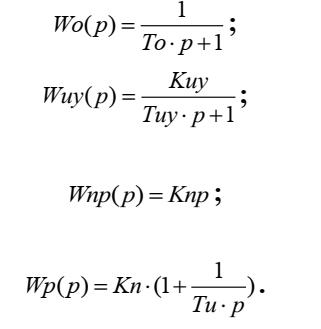 Ход решения:
Задание 1 1. Получить передаточную функцию разомкнутой системы. Исходная структурная схема: 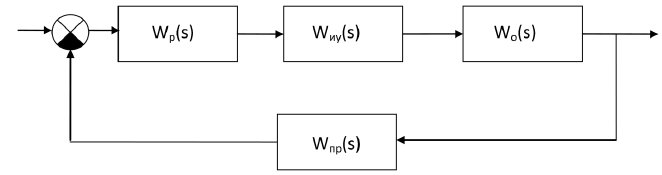 Рис.2 - Структурная схема САР расхода Подставляем значения коэффициентов из таблицы 1:  ПФ разомкнутой системы находится как произведение всех звеньев, последовательно включённых в состав системы:  Задание 2 2. Получить передаточную функцию замкнутой системы. ПФ замкнутой системы:  Задание 3 3. Определить устойчивость САР по алгебраическому критерию Гурвица. Из найденной ПФ замкнутой системы  выделяем характеристический полином системы – знаменатель ПФ: выделяем характеристический полином системы – знаменатель ПФ:  По необходимому условию Гурвица, все коэффициенты характеристического полинома должны быть положительными. Необходимое условие выполняется. Достаточное условие: Для того, чтобы система была устойчивой, достаточно, чтобы определители всех порядков матрицы Гурвица были положительными. Формируем матрицу Гурвица:   Рассчитываем определители матрицы Гурвица:  Определители 2 и 3 порядка положительные, следовательно, замкнутая система устойчива. Задание 4 4. Определить устойчивость САР по частотному критерию Михайлова. Система устойчива, если годограф Михайлова начинается на положительной полуоси и, раскручиваясь против часовой стрелки, последовательно проходит n четвертей [n – порядок характеристического полинома] Характеристический полином системы: Произведём в характеристическом полиноме замену s→jω:  Выделяем действительную и мнимую составляющую:  При ω = 0 получим первую точку годографа Михайлова. Заносим значение в таблицу и отмечаем координаты точки при ω = 0 на комплексной плоскости:  Занесём эту частоту и значения действительной и мнимой составляющих в таблицу 2. Определяем вторую точку пересечения годографа с осями координат. Значение частоты, при которой характеристика пересекает мнимую ось, определяем, приравнивая вещественную часть к нулю:  Находим значение мнимой части при этой частоте:  Занесём эту частоту и значения действительной и мнимой составляющих в таблицу 2. Находим третью точку пересечения кривой Михайлова с осями координат. Значение ω, при котором годограф пересекает вещественную ось между третьим и вторым квадрантами, находим, приравнивая мнимую часть к нулю:  Находим значение вещественной части при этой частоте:  Занесём эту частоту и значения действительной и мнимой составляющих в таблицу 2. Найдём значения X(ω) и Y(ω) на некоторых других частотах: Таблица 2: Строим годограф Михайлова: 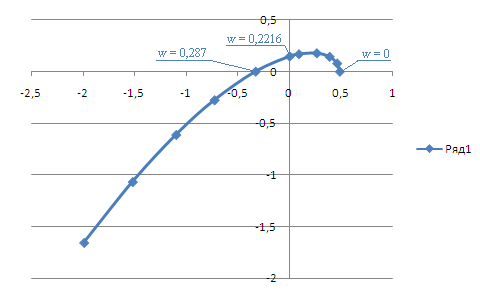 Годограф Михайлова начинается на положительной полуоси, и последовательно проходит n = 3 четверти, следовательно, замкнутая система устойчива. Исследуем устойчивость САР по критерию Гурвица. Характеристическое уравнение (полином) замкнутой системы имеет вид:  Составляем главный определитель Гурвица  Определяем диагональные миноры этого определителя    или  Все диагональные миноры главного определителя Гурвица оказались положительными, следовательно, все корни характеристического уравнения будут иметь отрицательные вещественные части, а САР будет устойчива. . СПИСОК ЛИТЕРАТУРЫ 1. Схиртладзе, А.Г. Автоматизация технологических процессов и производств. [Электронный ресурс] / А.Г. Схиртладзе, А.В. Федотов, В.Б. Моисеев, В.Г. Хомченко. — Электрон. дан. — Пенза : ПензГТУ, 2015. — 442 с. — Режим доступа: http://e.lanbook.com/book/63096 — Загл. с экрана. 2. Селезнева, С.В. Введение в специальность "Автоматизация технологических процессов и производств". [Электронный ресурс] / С.В. Селезнева, И.А. Прошин. — Электрон. дан. — Пенза : ПензГТУ, 2012. — 64 с. — Режим доступа: http://e.lanbook.com/book/62530 — Загл. с экрана. 3. Прошин, И.А. Автоматизация технологических процессов и производств Подготовка и выполнение курсового проектирования. Учебнометодическое пособие для студентов, обучающихся по специальности 220301 "Автоматизация технологических процессов и производств". [Электронный ресурс] / И.А. Прошин, Н.Н. Руденко. — Электрон. дан. — Пенза : ПензГТУ, 2013. — 250 с. — Режим доступа: http://e.lanbook.com/book/62506 — Загл. с экрана. 4. Проектирование систем автоматизации технологических проц ессов / А. С. Клюев [и др], - М. : Альянс, 2008. - 464 с. 5. Шандров Б.В. Автоматизация производства: учебник / Б.В. Шандров, А.А. Шапарин, А.Д. Чудаков. – 4-е изд., стер. – Москва: ИЦ «Академия», 2008. – 336с. 6. Гольдберг О.Д. Инженерное проектирование и САПР электрических машин: учебник / О.Д. Гольдберг, И.С. Свириденко. – Москва: ИЦ «Академия», 2008. – 560с. 7. Андреев Е.Б. Технические средства систем управления технологическими процессами нефтяной и газовой промышленности. - М. Просвещение, 2005. 8. Веревкин А. П., Кирюшин О. В. Автоматизация технологических процессов и производств в нефтепереработке и нефтехимии. - М.: Высшая школа, 2005. |