Контрольная работа по дисциплине Электропривод в устройствах железнодорожной автоматики и телемеханики Проверил
 Скачать 398.81 Kb. Скачать 398.81 Kb.
|

|
«МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «РОССИЙСКИЙ УНИВЕРСИТЕТ ТРАНСПОРТА» РУТ (МИИТ) РОССИЙСКАЯ ОТКРЫТАЯ АКАДЕМИЯ ТРАНСПОРТА Кафедра: «Системы управления транспортной инфраструктурой» КОНТРОЛЬНАЯ РАБОТА по дисциплине: «Электропривод в устройствах железнодорожной автоматики и телемеханики» Проверил: Выполнил: доцент, к.т.н. студент 5-го курса, Минаков Е.Ю. группы ЗСА-5912 Титов Д.А. Шифр:1710-ц/СДс-0447 Москва 2022г. Содержание:
1.ЗаданиеВ ходе выполнения контрольной работы необходимо: Составить кинематическую схему электропривода и дать описание назначения и принципа его работы. Описать механизм замыкания (фиксации) главного исполнительного элемента. Произвести кинематический расчет электропривода. Определить номинальную мощность и коэффициент полезного действия электропривода Рассчитать номинальную мощность и номинальный ток электродвигателя Произвести прочностной расчет одного из элементов кинематической схемы Составить схему управления электроприводом Определить дальность установки электропривода Исходные данныеКинематическая схема – ВСП-220Н Время перевода – 6 с. Номинальное / максимальное усилие (момент) перевода – 3500/6000 Н (Нм) Ход шибера - 220 Тип электродвигателя – МСА-0,3ВСП Расчет на прочность – на срез Расчетная часть3.1. Кинематическая схема электропривода, описание назначения и принципа его работы. Описание механизма замыкания (фиксации) главного исполнительного элемента Электропривод стрелочный типа ВСП-220 предназначен для перевода в повторно – кратковременном режиме, запирания и контроля положения в непрерывном режиме стрелок с раздельным ходом остряков. Относится к винтовым электромеханическим приводам, быстродействующим, врезным, с внутренним замыканием для работы с внешними замыкателями. Устанавливается на гарнитуре у жд стрелок с правой или левой стороны стрелочного перевода и управляется с поста ЭЦ для рабочих скоростей движения поездов до 250 км/час; предельная рабочая скорость 300 км/час. Обеспечивает при крайних положениях стрелки плотное прилегание прижатого остряка к рамному рельсу. Не допускает запирания стрелки при зазоре 4мм и более между прижатым остряком и рамным рельсом. Имеет принципиально новую конструкцию основных узлов (силового механизма, механизма замыкания шибера и контрольной системы), позволяющих повысить уровень безопасности движения поездов и снижающих эксплуатационные затраты. Кинематическая схема электропривода шлагбаума ВСП-220Н представлена на рисунке 1.  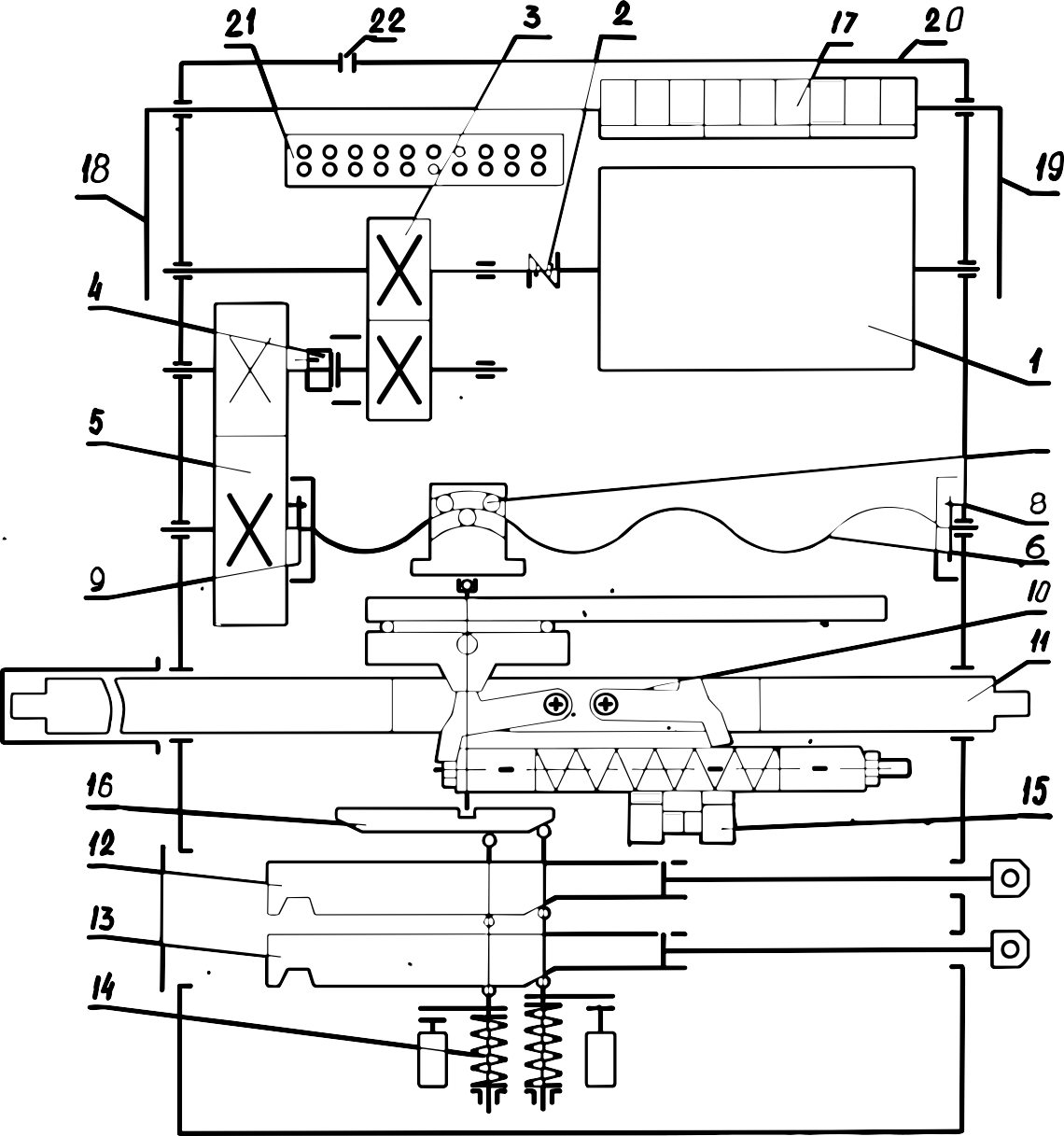 1 – электродвигатель 2 – кулачковая муфта 3 – 1-я ступень редуктора 4 – фрикционная муфта – 2-я ступень редуктора – гайка шарико – винтовой пары 7 – винт шарико – винтовой пары 8, 9 – демпфирующее устройство 10 – механизм запирания 11 – шибер 12,13 – контрольные линейки 14 – контрольная планка – автопереключатель – корпус 17,18 – курбельная заслонка 19 – клеммная колодка 20 – контакты безопасности  Рис. 3 Кинематическая схема механизма замыкания и взреза стрелочно- го электропривода ВСП-220 Механизма замыкания и взреза стрелочного электропривода ВСП-220 представляет собой конструкцию (см.рис.3) из шибера 1, состоящего из двух выходных концов круглого сечения диаметром 45 мм и средней части прямо- угольного сечения с проточками, где устанавливаются шарнирно на осях 4,5 кулачки 2,3. Механизм фиксации и взреза состоит из шиберной части 1,2,3,4,5, толкателя 6 и упругого упора, который представляет собой три эле- мента: упор левый 8, упор правый 9, разведенные пружиной 7. При взрезе стрелки усилие на шибере превосходит величину усилия удержания - усилия фиксации шибера. Упор 8 под действием этой силы, дей- ствующей через кулачок 2, преодолевая усилие пружины 7, сжимает ее и, при неподвижном положении толкателя 6, шибер осуществляет движение в направлении действия силы взреза (слева направо). При этом кулачок 2 вы- ходит из контакта с выступом толкателя 6 о поверхность, проворачивается на своей оси 4 и дальнейшее движение шибера происходит беспрепятственно. Электропривод взрезан. мм). Для того чтобы восстановить работоспособность привода, необходимо: При помощи специальной гайки-винта сжать упор (примерно на 15 Вручную, при помощи курбеля, перевести гайку ШВП в крайнее до взреза положение. При помощи рычага, (в качестве рычага можно использовать лом) перевести остряки в первоначальное положение. Распустить сжатый упор, открутив гайку-винт. Вручную, или при помощи курбельной рукоятки, произвести пере- вод электропривода, убедившись в его работоспособности. Кинематический расчет электроприводаОпределим количество оборотов винтовой передачи для перемещения шибера на 220 мм: 𝑁 = 𝑆ш/∆𝑆 = 220/5 = 44 об. Где ∆S –шаг винта винтовой передачи, равный 5 мм Определим частоту вращения винтовой передачи: 𝑛вп = 𝑁/𝑡 =44/6=7,33 об/сек=440 об/мин Определим момент на винте шарико – винтовой передачи (ШВП) для передачи необходимого осевого усилия: 𝑀в = 𝐹 ∗ ∆𝑆 ⁄ 2 ∗ 𝜋 ∗ 𝜂 = 3500 ∗ 5/2 ∗ 3,14 ∗ 0,9 = 3,096 кНм, Где 𝛈=0,9 – КПД винтовой пары Согласно исходным данным, в электроприводе необходимо применить электродвигатель МСА-0,3 со следующими параметрами:
Найдем передаточное отношение передачи: Для первой ступени 𝑖1=1: Тогда 𝑛1 =850*1=850 об/мин Для второй ступени 𝑖2=0,52: Тогда 𝑛2 =850*0,52=442 об/мин Определение номинальной мощности, коэффициента полезного действия электропривода и номинального тока электродвигателяПроизведем расчет мощностей электропривода и по полученным данным построим энергетическую диаграмму Находим полезную мощность на шибере: 𝑃ш = 𝐹ном ∗ 𝑆ш/𝑡 =3500*220*10−3/6=128 Вт 𝜂ш = 𝑃ш/𝑃1 КПД электропривода определяется равенством: 𝜂эп = 𝜂д ∗ 𝜂п ∗ 𝜂в ∗ 𝜂с ∗ 𝜂𝑞 = 𝑃ш/𝑃1 Где 𝜂д=0.66 – КПД трехфазного электродвигателя 𝜂п=0,985 – КПД зубчатой передачи 𝜂в=0,9 – КПД винтовой передачи 𝜂𝑞=0.98 – КПД учитывающий дополнительные потери энергии 𝜂с=1- (∆Р𝑐/∆𝑃4) – КПД скольжения шибера Определяем 𝜂с Мощность, переданная на шибер: 𝑃4 = 𝑃ш + ∆𝑃с + ∆𝑃доб Находим мощность потерь на трение скольжения о направляющие: ∆𝑃𝑐 = 𝐺ш ∗ 𝑞 ∗ 𝜓ш ∗ 𝑆ш⁄𝑡, Где 𝐺ш=8 кг – масса шибера 𝜓ш = 0,15 - коэффициент трения скольжения чугун – сталь, тогда ∆𝑃𝑐 = 8 ∗ 9,8 ∗ 0,15 ∗ 0,220⁄6=0,431 Вт Определяем ∆Рдоб, которая не превышает 2% от значения полезной мощности на шибере: ∆Рдоб = 0,02 ∗ 𝑃ш=0,02*128=2,56 Вт Тогда, Р4 =128*0,431*2,56=141,23 Вт, 𝜂с = 1 − (∆Рс/∆Р4) =1-(0,431/141,23)=0,99 КПД привода определяется следующим образом: 𝜂эп = 0,66 ∗ 0,9852 ∗ 0,982 ∗ 0,9 ∗ 0,99 ∗ 0,98 = 0,54 КПД механизма электропривода: п в 𝜂м = 𝜂д ∗ 𝜂3 ∗ 𝜂2 ∗ 𝜂с ∗ 𝜂𝑞 = 𝑃ш/𝑃1 𝜂м = 0,662 ∗ 0,9853 ∗ 0,92 ∗ 0,99 ∗ 0,98 = 0,327 Определим мощность потребляемую электроприводом: Р1 = Рш/𝜂м =128/0,327=391,4 Вт Р3- мощность переданная на винт ШВП определяется: Р3 = Р4/𝜂вп=141,23/0,9=156,9 Вт, где 𝜂вп=0,85-0,95- КПД винтовой пары качения Потери мощности винтовой передачи: ∆Рш = Р3 − Р4 =156,9-141,23=15,67 Вт Определим потери мощности в зубчатых передачах: ∆Рзуб = Р2 − Р3, где ∆Рзуб=Р3/𝜂з =156,9/0,982 =163,37 Вт, Где 𝜂з= 0,982, следовательно Р2 = Р3 + ∆Рзуб=156,9+163,37=320,27 Вт Находим потери мощности в подшипниках качения: ∆Р𝑛 = Р1 − Р2 =391.4-320.37=71,13 Вт, где Р1 = Р2/𝜂𝑛 =320.27/0.956=335.01 Вт – полезная мощность на валу электродвигателя. Мощность, потребляемая электроприводом из сети: Р0 = Р1/𝜂дв =335,01/0,66=507,59 Вт, где 𝜂дв=0,66 – КПД трехфазного электродвигателя переменного тока Находим потери мощности в электродвигателе: ∆Рд = Р0 − Р1 = 507,59 − 335,01 = 172,58 Вт Определяем момент на валу электродвигателя:  М2 = 𝐹ном ∗ ∆𝑆/2 ∗ 𝜋 ∗ 𝜂м=3500*220*103/2 ∗ 3,14 ∗ 0,82 =149,5 Нм Номинальный ток электродвигателя определяем из выражения: Р1 = √2 ∗ 𝑈 ∗ 𝑐𝑜𝑠𝜑 𝐼 = Р1/√2 ∗ 𝑈 ∗ 𝑐𝑜𝑠𝜑=335,01/√2 ∗ 190 ∗ 0,72 =2,4 А Энергетическая диаграмма мощностей механизма электропривода представленана рисунке 2.  𝑃доп 𝑃ш 𝑃доп 𝑃ш𝑃0 𝑃1 𝑃2 𝑃3 𝑃4 141,23 Вт 2,56 Вт 128 Вт 507,59 Вт 335,01 Вт 156,9 Вт 320,27 Вт Рисунок 2. Энергетическая диаграмма мощностей электропривода Расчет валика крепления рабочей тягиПо условиям конструкции валик работает на срез. Исходные данные: Диаметр валика – 26 мм = 0,026 м Материал – сталь марки 3 Вид нагрузки – знакопеременная Номинальное усилие перевода – 3500 Н Максимально усилие перевода – 6000 Н Усилие удержания шибера при врезе – 8000 Н Допустимые напряжения на срез – 40,0 МРа Предел текучести – 210,0 МПа Напряжение среза: 𝜏ср = 2𝐹   𝜋𝑑2 𝜋𝑑2= 2∗3500 3.14∗0,0262 = 1.5 МПа При максимальном усилии на шибере: 𝜏 = 2𝐹𝑚𝑎𝑥 = 2∗6000 = 2.58 МПа ср 𝜋𝑑2 3.14∗0,0262 При рабочем усилии на шибере (врез): 𝜏 = 2𝐹вз = 2∗8000 = 3,44 МПа ср 𝜋𝑑2 3.14∗0,0262 Схема управления электроприводом ВСП-220НВ двухпроводной схеме управления стрелочным электроприводом на посту ЭЦ установлены: нейтральное НПС, поляризованное ППС, пусковые стрелочные реле, общее контрольное реле ОК, плюсовое ПК и МК, контрольные реле. Пост ЭЦ соединен двумя проводами Л1 и Л2 (линейными) с реверсирующим реле Р и электроприводом. По этим проводам образуется рабочая цепь для перевода стрелки и контрольная переменного тока для контроля положения стрелки. В соответствии с рисунком 3 стрелка находится в плюсовом положении. Контрольная цепь, подключенная через трансформатор КТ к источнику переменного тока фиксирует плюсовое положение стрелки. Так реле ОК зашунтировано выпрямительным столбиком ВС так, что через ВС и контакты 33- 34, 31-32 автопереключателя замыкаются отрицательные полуволны переменного тока от полюсов ОХ и ПХ. Через обмотку реле ОК протекает ток, постоянная составляющая которого имеет положительную полярность. Цепочка К-С повышает постоянную составляющую тока, протекающего через реле, и исключает протекание постоянной составляющей через трансформатор. От постоянной составляющей положительной полярности реле ОК притягивает нейтральный якорь, поляризованный якорь переключается в нормальное положение, и создается цепь включения реле ПК. Через замкнутый контакт реле ПК, включается зеленая лампочка, контролирующая плюсовое положение стрелки. Для перевода в минусовое положение ДСП переключает стрелочный коммутатор в положение (-). Образуется цепь включения реле НПС по верхней обмотке через поляризованный контакт реле ППС в нормальном положении с проверкой условий свободности стрелочной изолированной секции (СП) и отсутствия замыкания стрелки в ранее установленном маршруте. Сработав, реле НПС замкнувшими фронтовыми контактами подготавливает цепь включения реле ППС, а так же рабочую цепь питания двигателя Д. Разомкнувшимися тыловыми контактами реле НПС от линейных проводов Л1 и Л2 отключается реле ОК, чем прекращается контроль плюсового положения стрелки. Реле ПК выключается, лампа З гаснет, загорается лампа К. Реле ППС, сработав по цепи питания нижней обмотки, переключает поляризованный якорь. От полюса рабочей батареи РП к РМ пройдет ток через фронтовые контакты реле НПС, переведенные контакты реле ППС. Линейные провода Л2, Л1, обмотку реле Р и нижнюю обмотку реле НПС. Поляризованное реле Р переключит поляризованный якорь и замкнет рабочую цепь питания двигателя через контакты 11-12 автопереключателя. Стрелка переведется в минусовое положение. На все время перевода реле НПС остается включенным за счет рабочего тока, протекающего по нижней токовой обмотке. По окончанию перевода стрелки рабочая цепь размыкается контактами 11-12 автопереключателя. Реле НПС выключается, его контакты размыкают рабочую цепь и включают контрольную. Через замкнутые контакты 24-23 и 21-22 автопереключателя выпрямительный столбик ВС подключается параллельно обмотке реле ОК обратной полярностью так, что положительные полуволны переменного тока замыкаются через ВС, а отрицательные – через реле ОК. Реле ОК сработав, переключает поляризованный якорь в переведенное положение, притягивает нейтральный якорь и образует цепь включения реле МК. Загорается желтая лампа контроля минусового положения, красная гаснет. Рисунок 3. Схема четырех – и двухпроводной схем управления стрелочным электроприводом.  Определение дальности установки электроприводаЭлектроприводы ЭЦ, как правило, удалены от источника электропитания на расстоянии 20-1500м. Для нормальной работы электропривода важен вопрос определения максимального радиуса управления без дублирования жил кабеля. Расчетная формула длины кабеля без дублирования жил кабеля: L=𝑈н − 𝑈д⁄2 ∗ 𝐼 ∗ 𝑟1 = 190 − 110/2 ∗ 2,4 ∗ 0,0234 = 758,16 м Где 𝑈н - напряжение источника 𝑈д - напряжение на зажимах электродвигателя 𝑟1 - 0,0234 Ом/м сопротивление медной жилы кабеля диаметром 1мм 𝐼 – рабочий ток электродвигателя ЗаключениеВ ходе выполнения контрольной работы была рассмотрена кинематическая схема электропривода ВСП-220, его основные характеристики и назначение, произведен кинематический расчет электропривода, рассчитана номинальная мощность и номинальный ток электродвигателя МСТ-0,25, произведен прочностной расчет валика крепления рабочей тяги, составлена схема управления электроприводом и определена максимальная дальность установки электропривода ВСП-220 от источника питания. Список используемой литературыЭлектропривод в устройствах жд автоматики и телемеханики. Задание на контрольную работу с методическими рекомендациями, 2005г. – 31с Решетов Д.М. Детали машин. – М.:Машиностроение, 1989г.-496с. Резников Ю.М. Электроприводы жд автоматики и телемеханики. – М.: Траспорт, 1985г. – 288с. Сороко В.И., Милюков В.А. Аппаратура жд автоматики и телемеханики: Справ.Т.1. – НПФ «Планета», 2000г - 960с. Сороко В.И., Розенберг Е.Н. Аппаратура жд автоматики и телемеханики: Справ.Т.2. – НПФ «Планета», 2000г - 1008с. |