Контрольная работа. Контрольная работа по дисциплине Теория механизмов и машин
 Скачать 0.79 Mb. Скачать 0.79 Mb.
|

|
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «Саратовский государственный технический университет имени Гагарина Ю.А.» Институт машиностроения, материаловедения и транспорта Кафедра «Техническая механика и мехатроника» КОНТРОЛЬНАЯ РАБОТА по дисциплине «Теория механизмов и машин»
Толмачёв А.А._192430 _ с-НТСз-41_2023_7.doc Саратов - 2022 Задание 1 Структурный анализ манипулятора промышленного робота Определить степень свободы пространственной манипуляционной системы промышленного робота. Вариант схемы механизма, подлежащей анализу, выбирается из рисунков по последней цифре зачетной книжки студента. При структурном анализе схемы манипулятора с несколькими степенями свободы указать стойку (неподвижное звено - 0), подвижные звенья, виды кинематических пар, их класс и взаимное расположение. Число степеней свободы манипулятора определяется по формуле для пространственных механизмов. 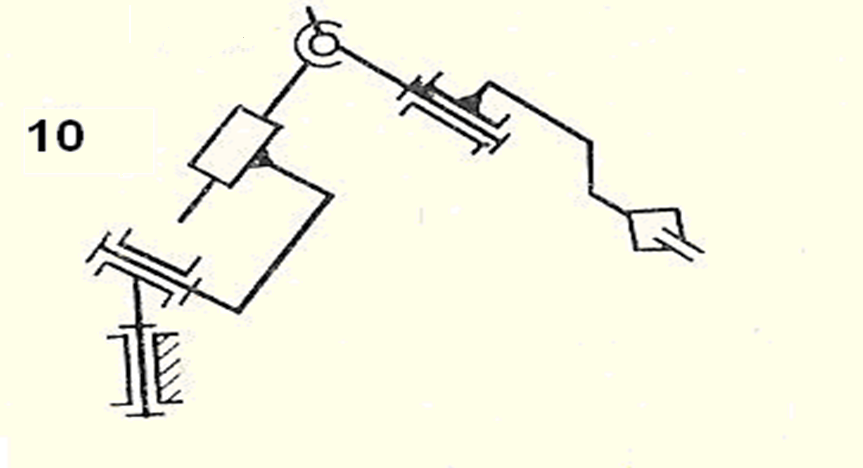 Задание 2 Кинематический анализ коробки передач При анализе коробки передач, представляющей собой зубчатый механизм с несколькими степенями свободы, необходимо составить схемы передачи движения от входного вала к выходному для каждой передачи, определить соответствующие передаточные отношения и скорости вращения выходного звена. 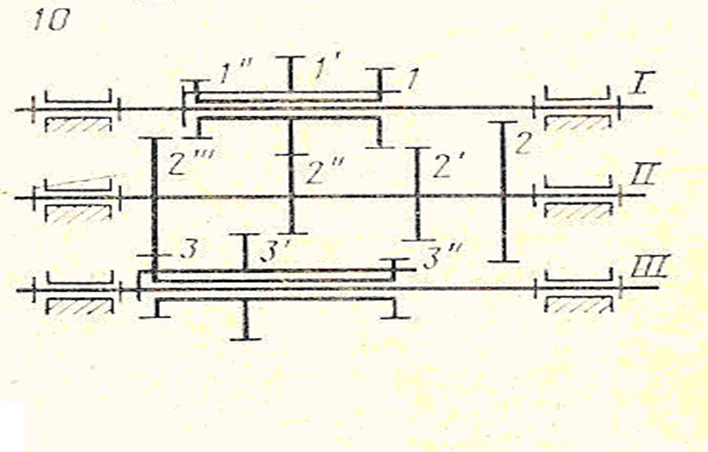 В девятискоростной ступенчатой коробке передач (рис. 2.10) определить значения передаточных отношений при различных передачах и скорости вращения выходного вала III, если заданы числа зубьев колес и скорость вращения входного вала I(табл. 2.10). 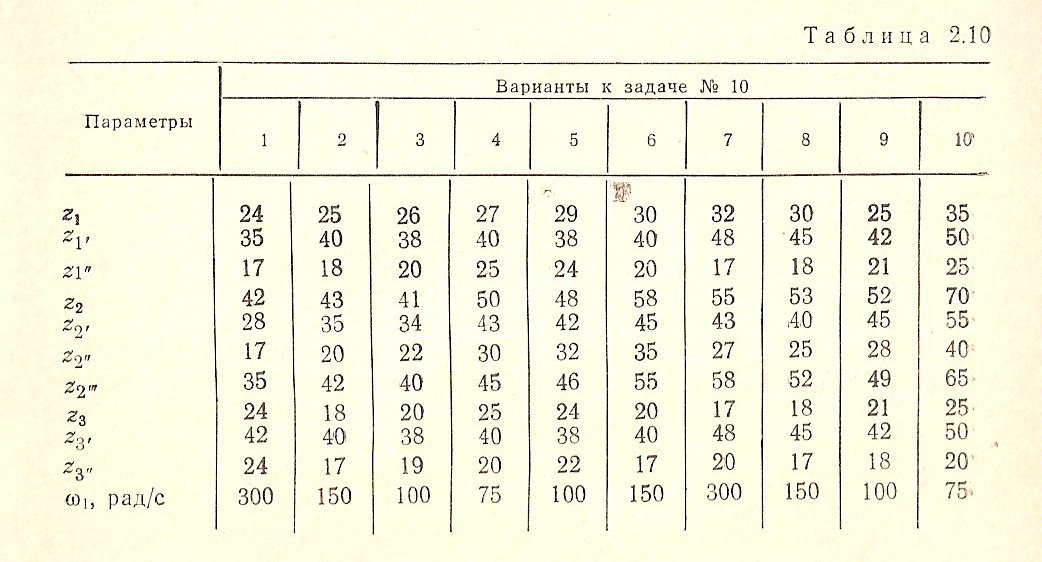 Задание 3 Для положения рычажного механизма, изображенного на рисунке, необходимо: Методом построения планов скоростей и ускорений определить скорости и ускорения ползунов D и B. 2. Методом кинетостатики определить реакцию RA в шарнире А и приведенный момент на кривошипе Тпр от приложенных сил сопротивления F1 , F2 и момента сил сопротивления М.  Размеры звеньев механизма и частота вращения ведущего звена
1. Моменты инерции звеньев относительно оси, проходящей через центр тяжести определять по формуле  , где , где  - масса звена, а - масса звена, а  - длина звена. - длина звена.ФИО Толмачёв Алексей Александрович Группа с-НТСз-41 Дата 02.02.2023 Шифр. № 192430. СодержаниеЗадача 1. 6 Задача 2. 7 Задача 3. 9 Список используемой литературы: 12 Задача 1.Формулировка задания: «Определить степень свободы пространственной манипуляционной системы промышленного робота». 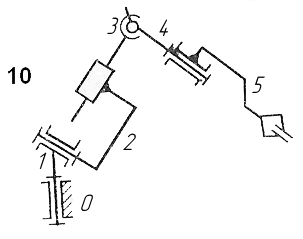 Рис. 1. Схема манипуляционной системы промышленного робота Механизм промышленного манипулятора (рис.1) состоит из неподвижного звена – стойки 0 и подвижных звеньев: 1,2,3,4,5. Следовательно, число подвижных звеньев равно шести, т.е. n=5. Число степеней свободы определяется по формуле Малышева: W= 6n – 1P1 – 2P2 – 3P3 – 4P4 – 5P5 Для определения значения коэффициентов P1, P2, P3, Р4, P5 выявим все кинематические пары, входящие в состав рычажной манипуляционной системы: - пара 0-1 класс подвижности 5, вращательная; - пара 1-2 класс подвижности 5, вращательная; - пара 2-3 класс подвижности 5, поступательная; - пара 3-4 класс подвижности 4, сферическая с пальцем; - пара 4-5 класс подвижности 5, вращательная; Подставим найденные значения коэффициентов в структурную формулу Малышева: W = 6  5 – 5 4 – 4 1 = 6 5 – 5 4 – 4 1 = 6Для определения маневренности, необходимо остановить (закрепить неподвижно) выходное звено 5. Следовательно, число подвижных звеньев становится равным 4. Значения всех остальных коэффициентов не изменяется. Подставим найденные значения коэффициентов в выражение для маневренности, получим: m = 6 4 – 5 4 – 4 1 = 0Задача 2.В девятискоростной ступенчатой коробке передач (рис. 2.10) определить значения передаточных отношений при различных передачах и скорости вращения выходного вала III, если заданы числа зубьев колес и скорость вращения входного вала I. 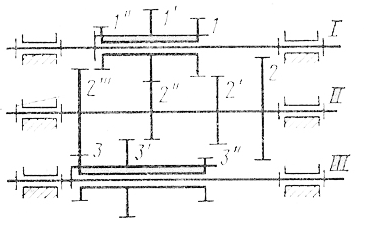 Рисунок 2.10 Z1=26, Z1’=38, Z1''=20 Z2=41, Z2’=34, Z2''=22, Z2'''=40, Z3=20, Z3’=38, Z3''=19, w1=100 рад/c. Решение: Рассмотрим все возможные передачи:                   Задача 3.Формулировка задания: «Для положения рычажного механизма, изображенного на рисунке, необходимо: Методом построения планов скоростей и ускорений определить скорости и ускорения ползунов D и B. 2. Методом кинетостатики определить реакцию RA в шарнире А и приведенный момент на кривошипе Тпр от приложенных сил сопротивления F1, F2 и момента сил сопротивления М». 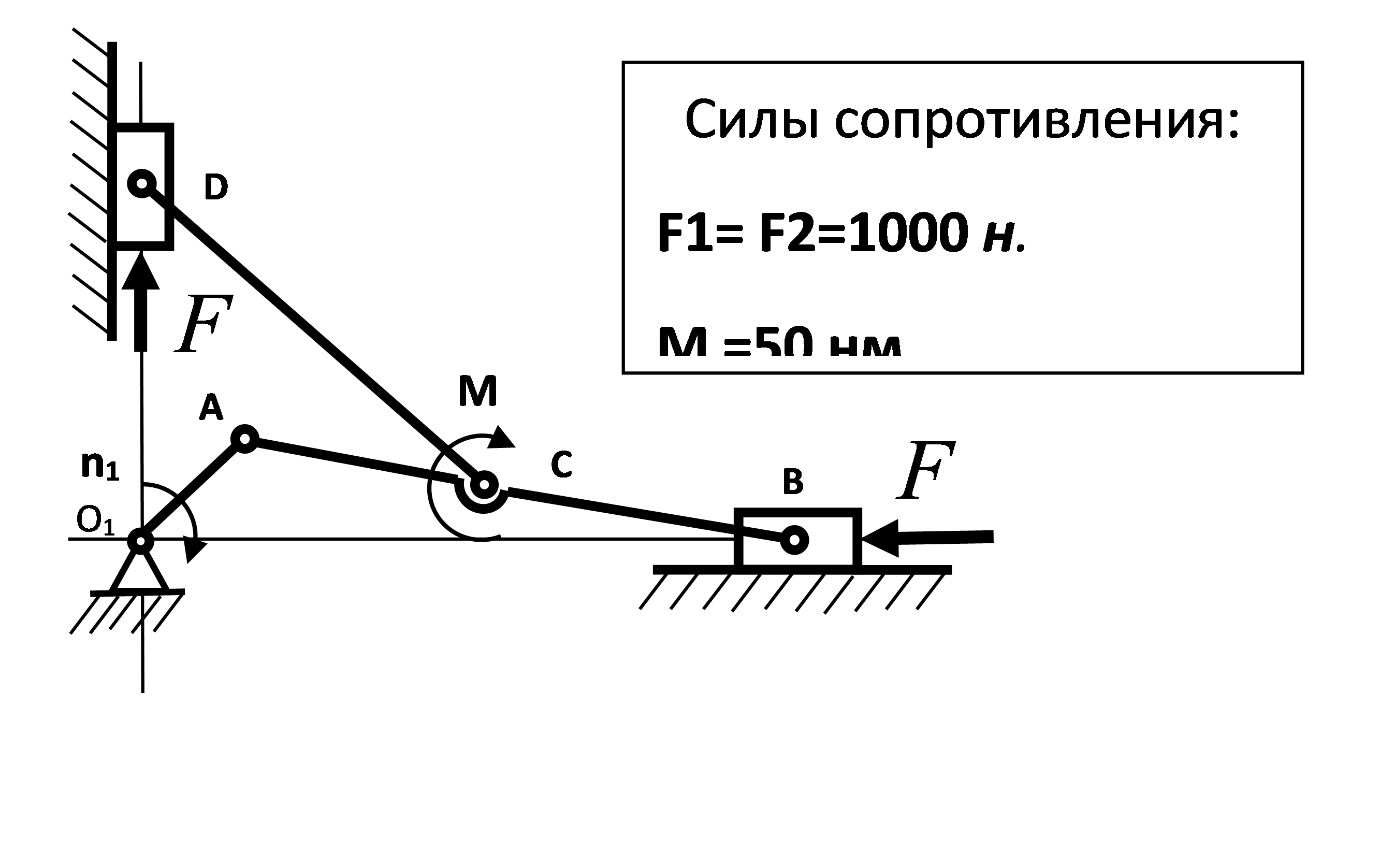 Моменты инерции звеньев относительно оси, проходящей через центр тяжести определять по формуле , где - масса звена, а - длина звена.
Схема механизма: 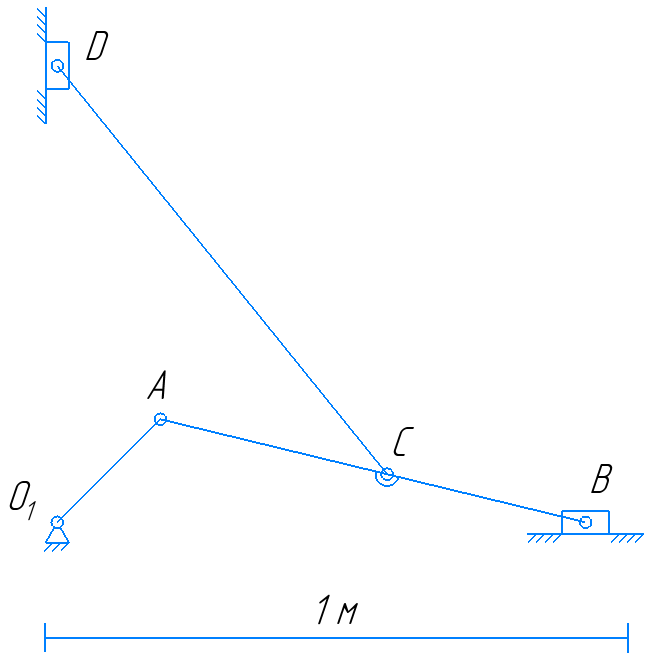 Скорость точки A равна: VA = ω1 * lO1A = 2π * n1 / 60 * lO1A = 5.8 м/с; Построим план скоростей: 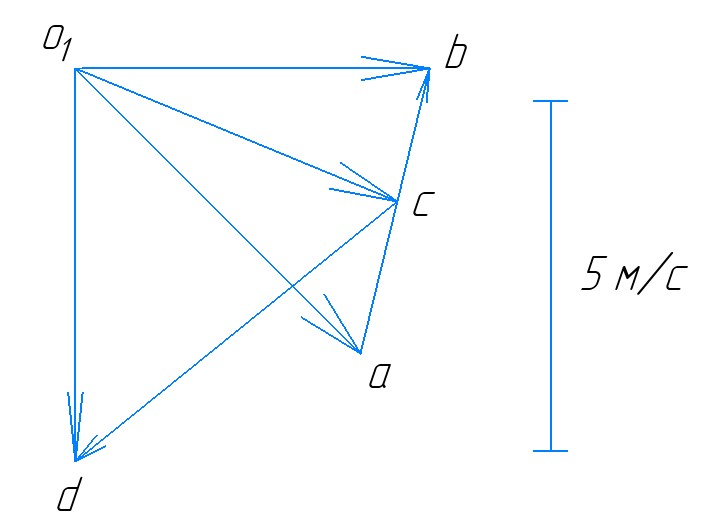 По плану скоростей находим скорость точек B и D: VB = 5.1 м/с; VD = 5.6 м/с; Ускорение точки A имеет только нормальную составляющую: aA = VA2 / lO1A = 23.4 м/с2 Построим план ускорений: 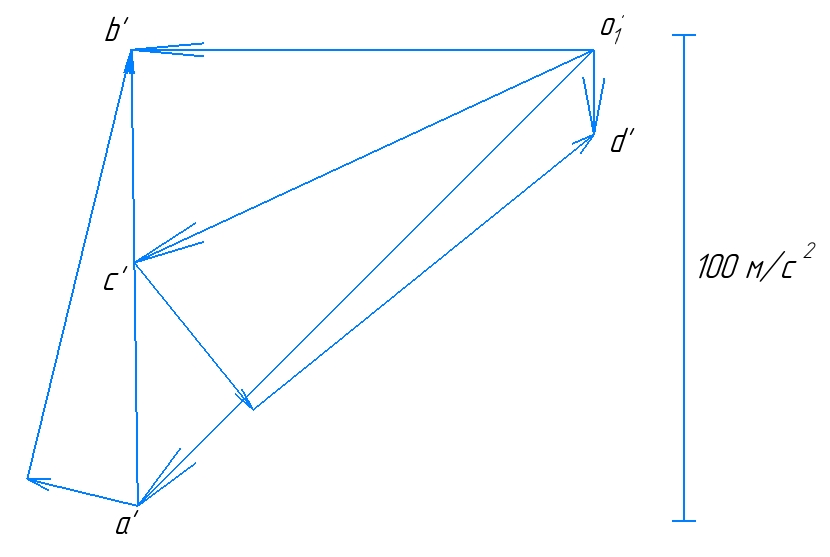 По плану ускорений находим ускорение точек B и D: aB = 95.2 м/с2; aD = 17.4 м/с2; Список используемой литературы:Теория механизмов и машин: учеб. пособие для студ. высш. учеб. заведений /М.З. Коловский и др.- М.: Издательский центр «Академия», 2008. - 560 с. – (12 экз.). Артоболевский И.И. Теория механизмов и машин: учебник / И.И. Артоболевский.–4-е изд., перераб .и доп.– М.: ИД Альянс, 2012г.-640 с. – (50 экз.). Артоболевский И.И. Сборник задач по теории механизмов и машин./ И.И. Артоболевский, Б.В. Эдельштейн – М.: ИД Альянс, 2013 г. - 156 с. – (25 экз.). Техническая механика: в 4-х кн. / под ред. Д.В. Чернилевского. Кн. 3. Основы теории механизмов и машин: учебное пособие / Я.Т. Киницкий. М.: Машиностроение, 2012. 104 с. Теория механизмов и машин. Сборник задач : учеб. пособие / В.В. Кузенков, И.В. Леонов, В.В. Панюхин и др. ; под ред И.Н. Чернышевой. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2010. - 63, [1] с. : ил. Движение механизмов под действием приложенных сил : учеб. пособие для подготовки к рубежному контролю знаний по дисциплине "Теория механизмов и машин" / Б. И. Плужников, С. Е. Люминарский; под ред. Г. А. Тимофеева. - М. : Изд-во МГТУ им. Н. Э. Баумана, 2013. 46, [2] - с.: ил. Интернет-ресурсы http://mechfac.ru/files/TiPM/Evdokimov_TMM_kurs%20lekzii_chast1.pdf - Евдокимов Ю.И. Теория механизмов и машин. Ч.1.: Структура, кинематика и кинетостатика механизмов: курс лекций / Новосиб. гос. аграр. ун-т. -2013. -136с. Последняя дата обращения – 02.07 2015. http://window.edu.ru/resource/129/76129/files/sintzubmex.pdf - Синтез зубчатых механизмов (Примеры решения задач и контрольные работы): Учебно методическое пособие для самостоятельной работы студентов. –Санкт-Петербург, 2007. Последняя дата обращения – 02.07 2015. www.teormach.ru/termin.htm - Теория механизмов и машин/ глоссарий. |