мдк 01. МДК 01.04. Контрольная работа по мдк 01. 04 Электрическое и электромеханическое оборудование
 Скачать 242.1 Kb. Скачать 242.1 Kb.
|

|
Министерство общего и молодежной политики Свердловской области Государственное автономное профессиональное образовательное учреждение Свердловской области «Североуральский политехникум» КОНТРОЛЬНАЯ РАБОТА по МДК 01.04: «Электрическое и электромеханическое оборудование» Тема: « Основные понятия электрического привода. Виды электрического привода и их классификация.» Выполнил: студент группы ТЭМ-3 Шигапова Ирина Сергеевна Проверил: преподаватель Гильманова Нэля Аликовна Дата «____» февраля 2023г. Оценка «___» _____________ __________________________ Подпись Североуральск, 2023г. Содержание.
Введение. Электрический привод представляет собой электромеханическое устройство, предназначенное для приведения в движение рабочего органа машины и управления ее технологическим процессом. Он состоит из трех частей: электрического двигателя, осуществляющего электромеханическое преобразование энергии, механической части, передающей механическую энергию рабочему органу машины, и системы управления, обеспечивающей оптимальное по тем или иным критериям управление технологическим процессом. Характеристики двигателя и возможности системы управления определяют производительность механизма, точность выполнения технологических операций, динамические нагрузки механического оборудования и ряд других факторов. С другой стороны, нагрузка механической части привода, условия движения ее связанных масс, точность передач и т. п. оказывают влияние на условия работы двигателя и системы управления, поэтому электрические и механические элементы электропривода образуют единую электромеханическую систему, составные части которой находятся в тесном взаимодействии. Свойства электромеханической системы оказывают решающее влияние на важнейшие показатели рабочей машины и в значительной мере определяют качество и экономическую эффективность технологических процессов. Развитие автоматизированного электроприводаведет к совершенствованию конструкций машин, к коренным изменениям технологических процессов, к дальнейшему прогрессу во всех отраслях народного хозяйства. 1. Схема включения, статические характеристики, пуск синхронного двигателя. Синхронные трехфазные двигатели (СД) широко применяются в электроприводах самых разнообразных рабочих машин и механизмов, что объясняется их высокими технико-экономическими показателями. 1.Синхронные двигатели имеют высокий коэффициент мощностиcos, равный единице для электроприводов небольшой мощности и опережающийcosв установках большой мощности. Способность СД работать с опережающимcosи отдавать в сеть реактивную мощность позволяет улучшать режим работы и экономичность сети электроснабжения. 2.Высокий КПД современных СД, составляющий 96–98 %, что на 1–1,5 % выше КПД АД тех же габаритов и скорости. 3.Возможность регулирования перегрузочной способности СД за счет регулирования тока возбуждения и меньшая зависимость этого показателя от напряжения сети по сравнению с АД. 4.Синхронный двигатель обладает абсолютно жесткой механической характеристикой. 5.Важным преимуществом конструкции СД является большой воздушный зазор, вследствие чего его характеристики и свойства мало зависят от износа подшипников и неточности монтажа ротора. 6.Возможность их изготовления на очень большие мощности (до нескольких десятков мегаватт и более). Статор СД, схема включения которого приведена на рисунке (Приложение А,а), а, выполняется аналогично статору асинхронного двигателя с трехфазной обмоткой, подключаемой к сети переменного тока. Ротор СД имеет обмотки возбуждения и пусковую короткозамкнутую в виде беличьей клетки. Конструктивно ротор СД может быть явнополюсным и неявнополюсным в виде цилиндра. В качестве источника для питания обмотки возбуждения чаще всего используется генератор постоянного тока 2 небольшой мощности (0,3. 3% от мощности СД), называемый возбудителем, который устанавливается на одном валу с двигателем 1. Регулирование тока возбуждения двигателя Iв. д осуществляется изменением с помощью резистора 3 тока Iв. в возбуждения возбудителя 4. Отметим, что в современных схемах автоматического регулирования возбуждения (АРВ) СД широко применяются тиристорные управляемые выпрямители (тиристорные возбудители). Замена электромашинного возбудителя СД на тиристорный управляемый выпрямитель повышает быстродействие АРВ, поскольку с учетом реального времени переходных процессов системы возбуждения управляемый выпрямитель можно считать безынерционным звеном. Вращающий момент СД обусловлен взаимодействием вращающегося магнитного поля, создаваемого обмотками статора, и магнитного поля, создаваемого обмоткой возбуждения или постоянными магнитами на роторе. Взаимодействие этих полей может создать постоянный по направлению вращающий момент СД только в том случае, когда ротор будет вращаться со скоростью магнитного поля Ω1 = 2πf1/pп, т.е. синхронно с вращающимся полем. Таким образом, механическая характеристика СД Ω(М) (Приложение А,б) представляет собой горизонтальную линию с ординатой Ω1, которая имеет место до некоторого максимального момента нагрузки Мmах, превышение которого приводит к выпадению СД из синхронизма, т. е. к нарушению синхронного вращения ротора и магнитного поля. Для определения максимального момента нагрузки Мmах, до которого сохраняется синхронная работа двигателя с сетью, служит угловая характеристика СД (Приложение В). Она отражает зависимость момента М от угла сдвига θ между векторами ЭДС статора Е и фазного напряжения сети Uф. Момент трехфазного СД представляет собой синусоидальную функцию угла θ: где Uф — фазное значение напряжения сети; Е — ЭДС в обмотке статора СД; х1 — индуктивное сопротивление фазы обмотки СД; Ω1 — скорость вращения магнитного поля. Максимального значения момент СД достигает при θ = π/2. Угол сдвига характеризует собой перегрузочную способность СД: при больших значениях угла θ двигатель выпадает из синхронизма, при небольших — его работа устойчива. Номинальные значения угла θном составляют обычно 25 о -30°, им соответствует номинальный момент Мном, и кратность максимального момента в этом случае СД может работать во всех основных энергетических режимах: двигательном и генераторном, с сетью и независимо от сети. Статические характеристики синхронного двигателя. В данной работе исследуются статические и энергетические характеристики БДПТ: зависимость частоты вращения от момента нагрузки n = f(Mн), зависимости потребляемой мощности и КПД от мощности на валу — P1 = f(P2), h = f(P2). Характеристики снимаются для двух заданных величин частоты вращения: 2000 об/мин и 4000 об/мин. Во время проведения опыта заполняются помеченные значком «*» строки таблицы 2: Iя – ток якоря ДПТ по прибору РАя, Id – ток инвертора по прибору РА, n – частота вращения. Строка таблицы ТР – номер на лимбе тормозного резистора Rя, символ «-» означает отключение нагрузочного устройства (QFя – в положении OFF). Перед началом опыта убедиться в том , что органы управления на лицевой панели стенда находятся в исходном состоянии: выключатель QF в положении OFF, регулятор R в положении против часовой стрелки до упора, выключатель SA в нижнем положении, выключатель QFя в положении OFF, тормозной резистор Rя в положении «1», выключатель SAв в нижнем положении, регулятор Rв в среднем положении. Включить стенд в сеть. Запустить на компьютере программу SM. Процесс подготовки компьютерной программы к работе описан в разделе «Описание интерфейса пользователя». После установки компьютера со стендом нажать кнопку Пуск. Плавно вращая регулятор R по часовой стрелке установить частоту вращения 2000 об/мин. Выключатель SAв перевести в верхнее положение, регулятором Rв установить ток возбуждения ДПТ 1,8 А. Выключатель QFя перевести в положение ON. Установить тормозной резистор Rя в положение, при котором максимальный ток якоря ДПТ не превышает 10 А, например в положение «10». Изменяя значение ТР, приступить к снятию показаний и заполнению таблицы 2. Во избежание перегрева тормозного резистора снятие показаний для ТР = 10, 9, 8, 7 проводить за более короткое время. Привести органы управления стенда в исходное состояние. Повторить опыт для n = 4000 об/мин и заполнить строки таблицы, помеченные значком «*». Мощность, потребляемая от источника P1 = Ud∙Id = 48∙Id. Выполнив указанные расчеты, заполнить таблицу 2 для n = 2000 об/мин и n = 4000 об/мин. Перевести выключатель SA3 в нижнее положение, замкнув таким образом обратную связь по частоте вращения, и выполнить вышеприведенный опыт в этом режиме работы двигателя. После окончания опыта вернуть SA3 в верхнее положение. Пуск синхронного двигателя. Одним из главных недостатков синхронных двигателей является сложность их пуска в ход. Пуск синхронных двигателей может быть осуществлен при помощи вспомогательного пускового двигателя или путем асинхронного пуска. Пуск синхронного двигателя при помощи вспомогательного двигателя. Если ротор синхронного двигателя с возбужденными полюсами развернуть другим, вспомогательным двигателем до скорости вращения поля статора, то магнитные полюсы статора, взаимодействуя с полюсами ротора, заставят ротор вращаться далее самостоятельно без посторонней помощи, в такт с полем статора, т. е. синхронно (откуда эти двигатели и получили свое название). Для осуществления пуска необходимо, чтобы число пар полюсов асинхронного двигателя было меньше числа пар полюсов синхронного двигателя, ибо при этих условиях вспомогательный асинхронный двигатель может развернуть ротор синхронного двигателя до синхронной скорости. Порядок пуска синхронного двигателя следующий. Включая рубильник 3, пускают вспомогательный асинхронный двигатель 2, который разворачивает ротор синхронного двигателя 1 до скорости, соответствующей скорости поля статора. Скорость вращения вспомогательного двигателя определяется по тахометру1. Затем, включая рубильник 4 постоянного тока, возбуждают полюсы ротора. Чтобы включить синхронный двигатель в сеть трехфазного тока, его нужно синхронизировать так же, как и при включении синхронного генератора на параллельную работу. Для этого реостатом 5 устанавливают такое возбуждение, чтобы напряжение обмотки статора по вольтметру V было равно напряжению сети, указываемому вольтметром V1. Электролампы 6, включенные параллельно ножам рубильника 7 трех-фазной сети, при разомкнутом рубильнике будут мигать. Сначала мигание будет частым, но если изменять скорость вращения вспомогательного асинхронного двигателя, то лампы будут мигать . все реже и реже. Синхронный двигатель можно включить в сеть трехфазного тока рубильником 7 тогда, когда все три лампы одновременно погаснут. Ротор двигателя при этом входит в синхронизм и может далее вращаться самостоятельно. Теперь вспомогательный двигатель 2 рубильником 3 можно отключить от сети. Сложность пуска и необходимость вспомогательного двигателя являются существенными недостатками этого способа пуска синхронных двигателей. Поэтому в настоящее время он применяется редко. Асинхронный пуск синхронного двигателя. Для осуществления этого способа пуска в полюсных наконечниках полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Так как во время пуска в обмотке возбуждения 1 двигателя наводится большая э. д. с, то по соображениям безопасности она замыкается рубильником 2 на сопротивление 3 При включении напряжения трехфазной сети в обмотку статора 4 синхронного двигателя возникает вращающееся магнитное поле, которое, пересекая короткозамкнутую (пусковую) обмотку, заложенную в полюсных наконечниках ротора, индуктирует в ней токи. Эти токи, взаимодействуя с вращающимся полем статора, приведут ротор во вращение. При достижении ротором наибольшего числа оборотов (95—97% синхронной скорости) рубильник 2 переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения. Недостатком асинхронного пуска является большой пусковой ток (в 5—7 раз больший рабочего тока). Пусковой ток вызывает падение напряжения в сети, а это отражается на работе других потребителей. Для уменьшения пускового тока применяют пуск при пониженном напряжении с помощью реактора 2 или автотрансформатора. 2. Регулирование скорости ДПТ НВ изменением магнитного потока. Искусственные характеристики ДПТ независимого возбуждения, получаемые путем изменения магнитного потока ДПТ, используются главным образом для регулирования скорости. Этот способ находит широкое применение в автоматизированном электроприводе вследствие простоты его реализации и экономичности, так как регулирование осуществляется в относительно маломощной цепи возбуждения ДПТ. Регулирование магнитного потока при использовании этого способа производится только в сторону его уменьшения (ослабления) по сравнению с номинальным за счет уменьшения тока возбуждения IВ. Причины этого кроются в следующих двух обстоятельствах. 1.Увеличение магнитного потока должно вызываться соответствующим увеличением тока возбуждения ДПТ. Однако поскольку номинальный магнитный поток создается номинальным током возбуждения, то увеличение тока возбуждения выше номинального вызывает дополнительный нагрев ДПТ, что недопустимо. 2.Двигатель рассчитан и сконструирован таким образом, что его магнитная система близка к насыщению. Это обстоятельство отражается в расположении номинальной точки Возможные схемы включения обмотки возбуждения ДПТ независимого возбуждения приведены на рисунке (Приложение С.3.10). Схема рисунка ( Приложение С.3.10)., апредусматривает включение в цепь возбуждения добавочного резистораRв,за счет чего ток возбужденияIви тем самым магнитный поток могут быть уменьшены. В схеме для изменения тока возбуждения используется управляемый выпрямительУВ,выходное напряжение которого регулируется по сигналу управленияUy.Эта схема более экономична и применяется для регулирования тока возбуждения мощных ДПТ. Семейство искусственных характеристик ДПТ (I) и(М)получим, рассмотрев изменение координат точек холостого хода и короткого замыкания при варьировании магнитного потока. В соответствии с уменьшение магнитного потока приведет к увеличению скорости идеального холостого хода0. Ток короткого замыкания Iк,з=U/Rяот магнитного потока не зависит и будет оставаться неизменным. Другими словами, все искусственные электромеханические характеристики проходят через одну и ту же точку на оси тока с координатами (0;Iк,з). Таким образом, при работе ДПТ на искусственных характеристиках он может быть натружен на свою номинальную мощность. Объяснение этого заключается в том, что хотя момент нагрузки при уменьшении магнитного потока должен быть снижен, одновременно повышается скорость ДПТ, а их произведение, определяющее механическую мощность, остается неизменным и численно равным номинальной мощности ДПТ. Таким образом, этим способом осуществляется регулирование при постоянной мощности. Данный способ нашел широкое применение в электроприводе металлорежущих станков, прокатных станов, наматывающих устройств. Он также часто используется в комбинации с другими способами регулирования скорости. 3. Основные требования к производственному освещению. Виды и системы освещения. Освещённость на рабочем месте должна соответствовать характеру зрительной работы; равномерное распределение яркости на рабочей поверхности и отсутствие резких теней; величина освещения постоянна во времени (отсутствие пульсации светового потока); оптимальная направленность светового потока и оптимальный спектральный состав; все элементы осветительных установок должны быть долговечны, взрыво-, пожаро-, элекгробезопасны. Видимая часть оптических излучений лежит в диапазоне длин волн от 380 до 760 нм. К основным понятиям, характеризующим свет, относятся: сила света, световой поток, освещенность и яркость. Сила света (I) - пространственная плотность светового потока, устанавливаемая по специальному эталону, называется канделой (кд). Световой поток (Ф) - поток лучистой энергии, оцениваемый глазом по световому ощущению. Единицей его измерения служит люмен (лм) - световой поток, созданный источником силой в одну канделу и помещенный в вершину телесного угла в один стерадиан. Так как распределение светового потока реальных источников в пространстве неравномерно, то для их характеристики используют поверхностную плотность светового потока - освещенность. Освещенность (Е) определяется отношением светового потока, падающего на поверхность, к ее площади: Е = Ф/S, (4) где Ф - световой поток, лм; S - площадь освещаемой поверхности, м2. Освещенность измеряется в люксах (лк). Освещенность не зависит от свойств поверхности, ее формы, цвета и т.п. Яркость (L) - величина, равная отношению силы света, излучаемого элементом поверхности в данном направлении, к площади проекции этой поверхности на плоскость, перпендикулярную к тому же направлению. Её определяют по формуле: L = I/(S * cosa ), (5) где a - угол к нормали светящейся поверхности. Способность глаза определять величину и форму предмета называют остротой зрения, а предельные размеры объекта, которые глаз воспринимает под наименьшим углом зрения, характеризуют разрешающую способность глаз. Утомление глаз вызывает ослабление остроты зрения и влияет на способность к аккомодации и адаптации. Аккомодацией называют приспособление глаза к ясному видению предметов, находящихся на разных расстояниях от наблюдателя. Адаптация - приспособляемость глаз к различным степеням освещенности. Свойство ярких поверхностей или источников света, вызывающих ослепление, называют блескостью, а результат нарушения зрительных функций глаз - слепимостью. Естественное освещение – освещение помещений светом неба (прямым или отражённым), проникающим через световые проёмы в наружных ограждающих конструкциях. Боковое естественное освещение – естественное освещение помещения через световые проёмы в наружных стенах. Верхнее естественное освещение – естественное освещение помещения через фонари, световые проёмы в стенах в местах перепада высот здания. Дежурное освещение – освещение в нерабочее время. Комбинированное освещение – освещение, при котором к общему освещению добавляется местное. Совмещённое освещение – освещение, при котором недостаточное по нормам естественное освещение дополняется искусственным. Эвакуационное освещение – освещение для эвакуации людей из помещения при аварийном отключении нормального освещения. Световой климат – совокупность условий естественного освещения в той или иной местности за период более десяти лет. Нормирование производственного освещения Человек различает окружающие предметы благодаря тому, что они имеют разную яркость. При плохом освещении он быстро устает и работает менее продуктивно. Плохое освещение может привести к профессиональному заболеванию (близорукости) и, наоборот, хорошее - действует благоприятно на человека. На рабочих местах, где требуется напряженная зрительная работа, улучшение освещения может поднять производительность труда на 5-10%. Основные гигиенические требования к производственному освещению заключаются в следующем: 1) освещенность рабочих поверхностей должна отвечать санитарно-гигиеническим нормам освещенности для определенных видов работ; 2) освещенность должна быть равномерной, без теней, бликов и блескостей; 3) разница яркостей не должна вызывать ослепления зрения и частой переадаптации; 4) прямой свет сильных источников должен быть конструктивно закрыт и не попадать в глаза работающим; 5) устройство светильников должно быть безопасным для работающих и соответствовать требованиям электро- и пожаробезопасности. Естественное освещение нормируется с помощью коэффициента естественной освещенности (КЕО), его значения для зданий: КЕО = Евн/Енар * 100%, (6) где Евн - освещенность оцениваемой точки внутри помещения лучами, проникающими через окна; Енар - освещенность той же точки наружным светом, если бы не было стен и потолка. Величина коэффициента КЕО для зданий, располагаемых в разных поясах светового климата, определяется “СНиП 23-05-95. Естественное и искусственное освещение”. Естественное освещение подразделяется на боковое, верхнее и комбинированное (сочетание верхнего и бокового освещения). Расстановку оборудования следует производить с учетом расположения световых проемов, добиваясь максимальной освещенности панелей, пультов, клавиатур ПЭВМ и другой оргтехники. Искусственное освещение подразделяется на общее, местное и комбинированное (местное и общее). Система общего освещения дает равномерный свет всему помещению. При комбинированном освещении на долю общего освещения приходится примерно 10%, а наибольший свет дают лампы местного освещения. Искусственное освещение делится на три вида: а) рабочее; б) аварийное (обеспечивает не менее 10% от нормы освещённости); в) охранное и дежурное. Аварийное освещение разделяется на освещение безопасности и эвакуационное. Освещение безопасности следует предусматривать в случаях, если отключение рабочего освещения и связанное с этим нарушение обслуживания оборудования и механизмов может вызвать: · взрыв, пожар, отравление людей; · длительное нарушение технологического процесса; · нарушение работы таких объектов, как электрические станции, узлы радио- и телевизионных передач и связи, установки вентиляции и кондиционирования воздуха для производственных помещений и т.п.; · нарушение режима детских учреждений. Эвакуационное освещение в помещениях или в местах производства работ вне зданий следует предусматривать: · в местах, опасных для прохода людей; · в проходах и на лестницах, служащих для эвакуации людей, при числе эвакуирующихся более 50 человек; · по основным проходам производственных помещений, в которых работают более 50 человек; · в лестничных клетках жилых зданий высотой 6 этажей и более; · в производственных помещениях с постоянно работающими в них людьми, где выход людей из помещения при аварийном отключении нормального освещения связан с опасностью травматизма из-за продолжения работы производственного оборудования; · в помещениях общественных и вспомогательных зданий промышленных предприятий, если в помещениях могут одновременно находиться более 100 человек; · в производственных помещениях без естественного света. Светильники освещения безопасности в помещениях могут использоваться для эвакуационного освещения. Для аварийного освещения следует применять лампы накаливания, люминесцентные лампы и разрядные лампы высокого давления. Возможно специальное освещение, например в фотолабораториях, при подсветки копировальных столов и т.п. Нормы искусственного освещения разработаны с учетом точности зрительной работы, размера рассматриваемых деталей и дополнены оценкой фона и контрастности изображения деталей. Для производственных помещений, в которых выполняются работы наивысшей точности (размер объекта различения менее 0,15 мм – I разряд), очень высокой точности (объект различения от 0,15 до 0,30 мм – II разряд) и высокой точности (размер объекта различения от 0,30 до 0,50 мм - III разряд) следует предусматривать совмещённое освещение. При аттестации рабочих мест по параметрам освещённости используется государственный стандарт “ГОСТ 24940-96. Здания и сооружения. Методы измерения освещённости”. Для гигиенической оценки освещения жилых и общественных зданий применяются санитарные правила и нормы «СанПиН 2.2.1/2.1.1.1278-03. Гигиенические требования к естественному, искусственному и совмещенному освещению жилых и общественных зданий». При освещении производственных помещений используют естественное освещение, создаваемое светом неба(прямым и отраженным), искусственное, осуществляем с электрическими лампами, и совмещенное, при котором в светлое время суток недостаточное по нормам естественное освещение дополняется искусственным.Bспектре естественного (солнечного) света в отличие от искусственного гораздо больше необходимых для человека ультрафиолетовых лучей; для естественного освещения характерна высокая диффузность (рассеянность) света, весьма благоприятная для зрительных условий работы. Естественное освещение подразделяют на боковое, осуществляемое через световые проемы в наружных окнах; верхнее, осуществляемое через аэрационные и зенитные фонари, проемы в перекрытиях, а также через световые проемы в местах перепада высот смежных пролётов зданий; комбинированное, когда к верхнему освещению добавляется боковое. По конструктивному исполнению искусственное освещение может быть двух систем —общее и комбинированное, когда к общему освещению добавляется местное, концентрирующее световой поток непосредственно на рабочих местах. Общее освещение подразделяют на общее равномерное освещение (при равномерном распределении светового потока без учета расположения оборудования) и общее локализованное освещение (при распределении светового потока с учетом расположения рабочих мест). Применение одного местного освещения внутри зданий не допускается. На машиностроительных предприятиях рекомендуется применять систему комбинированного освещения при выполнении точных зрительных работ (слесарные, токарные, фрезерные, контрольные операции и т. д.) там, где оборудование создает глубокие, резкие тени или рабочие поверхности расположены вертикально (штампы, гильотинные ножницы). Система общего освещения может быть рекомендована в помещениях, где по всей площади выполняются однотипные работы (в литейных, сборочных цехах), а также в административных, конторских, складских помещениях и проходных. Если рабочие места сосредоточены на отдельных участках, например у конвейеров, разметочных плит, целесообразно локализовано размещать светильники общего освещения. По функциональному назначению искусственное освещение подразделяют на следующие виды: рабочее, аварийное, эвакуационное, охранное, дежурное. Рабочее освещение обязательно во всех помещениях и на освещаемых территориях для обеспечения нормальной работы, прохода людей и движения транспорта. Аварийное освещение устраивают для продолжения работы в тех случаях, когда внезапное отключение рабочего освещения (при аварии) и связанное с этим нарушение нормального обслуживания оборудования могут вызвать взрыв, пожар, отравление людей, длительное нарушение технологического процесса, нарушение работы таких объектов, как электрические станции, диспетчерские пункты, насосные установки водоснабжения и другие производственные помещения, в которых недопустимо прекращение работ. Наименьшая освещенность рабочих поверхностей, требующих обслуживания при аварийном режиме, должна составлять 5%освещенности, нормируемой для рабочего освещения при системе общего освещения, но не менее 2лк внутри зданий. Эвакуационное освещение следует предусматривать для эвакуации людей из помещений при аварийном отключении рабочего освещения в местах, опасных для прохода людей, на лестничных клетках, вдоль основных проходов производственных помещений, в которых работает более 50человек. Эвакуационное освещение должно обеспечивать наименьшую освещенность в помещениях на полу основных проходов и на ступенях не менее0,5лк, а на открытых территориях —не менее 0,2лк. Выходные двери помещений общественного назначения, в которых могут находиться одновременно более 100человек, должны быть отмечены световыми сигналами-указателями. Светильники аварийного освещения для продолжения работы присоединяют к независимому источнику питания, а светильники для эвакуации людей—к сети, независимой от рабочего освещения, начиная от щита подстанции. Для аварийного и эвакуационного освещения следует применять только лампы накаливания илюминесцентные. В нерабочее время, совпадающее с темным временем суток, во многих случаях необходимо обеспечить минимальное искусственное освещение для несения дежурств охраны. Для охранного освещения площадок предприятий и дежурного освещения помещений выделяют часть светильников рабочего или аварийного освещения. 4. Электрические схемы автоматизации вентиляторных установок. Для поддержания требуемой температуры воздуха, удаления избыточного количества влаги и вредных газов животноводческие помещения оборудуют приточно-вытяжной (общеобменной) вентиляцией, а при необходимости установками для подогрева и увлажнения приточного воздуха. Для осуществления вытяжной вентиляции используют комплект оборудования типа «Климат-4», основу которого составляют регулируемые по производительности вентиляторы. Вентиляторы комплектуют специальными трехфазными асинхронными электродвигателями повышенного скольжения, которые при нагрузке способны в широких пределах изменять частоту вращения в зависимости от питаемого напряжения (от 70 до 380 В). В комплект оборудования типа «Климат-4» входит 8...24 вентилятора. Тип и число устанавливаемых в одном помещении вентиляторов определяются воздухообменом по летнему режиму. Оборудование типа «Климат-4» комплектуют также устройствами автоматического регулирования напряжения электродвигателей вентиляторов: станцией управления ШАП-5701 в комплекте с автотрансформатором АТ-10, бесконтактной станцией управления МК-ВАУЗ и др. Принципиальная электрическая схема станции управления ШАП-5701 (Приложение D). Автоматический выключатель QF1 выполняет функции коммутации и защиты силовых цепей, автотрансформатор ТА обеспечивает питание электродвигателей номинальным и пониженным (в две ступени) напряжением, магнитные пускатели КМ1 и КМ2 переключают обмотки автотрансформатора, КМЗ подает на двигатели номинальное напряжение, КМ4 и КМ5 управляют работой вентиляторов соответственно групп III и /. Вентиляторы группы II включаются одновременно с подачей напряжения, соответствующего низкой частоте вращения. Станция управления располагает пятью ступенями регулирования подачи воздуха в помещение. Переключатель SA3 и соответствующий ему автоматический трехпозиционный терморегулятор SK2 позволяют вручную или автоматически управлять вентиляторами групп I и III на низкой частоте вращения при температуре воздуха в помещении ниже номинальной. Переключатель SA2 и терморегулятор SK1 служат для включения средней и высокой частот вращения вентиляторов при температуре выше номинальной. Бесконтактная станция управления МК-ВАУЗ плавно регулирует частоту вращения вентиляторов как в ручном, так и в автоматическом режимах. На рисунке (Приложение Е) представлена блок-схема станции управления МК-ВАУЗ. Сигнал датчика температуры RK в помещении поступает на мост сравнения Л/С, в одном из плеч которого установлен резистор — ручной задатчик температуры ЗДТ. Затем через ус ил итель-де модулятор УД сигнал подается на узел смещения УС, который имеет резисторы — задатчик базового напряжения ЗБН, задатчик допустимого отклонения температуры ЗД и задатчик минимального напряжения ЗМН, которое допустимо подавать на статор электродвигателя данного типа. Далее сигнал подается в систему импульсно-фазового управления тиристорами СИФУ-1...СИФУ-3, где также корректируется сигнал, идущий от блока питания БП к блокам тиристоров каждой из фаз БТ1...БТЗ. Обслуживание станции управления заключается в периодической (один раз в шесть месяцев) корректировке шкалы задатчика температуры RK и проверке настройки станции на требуемые режимы работы. Для этого после часового прогрева станции управления необходимо: -по показанию ртутного термометра (температура воздуха в помещении), находящегося рядом с термометром сопротивления, установить задатчик температуры; -задатчик зоны пропорциональности установить на максимальное значение; -при неизменном положении задатчика базового напряжения корректором нулевого значения шкалы задатчика температуры при помощи переносного вольтметра добиться минимального значения напряжения на электродвигателях вентиляторов при наличии светового сигнала «Норма». После проверки настройки станции управления МК-ВАУЗ устанавливают задатчики температуры, базового напряжения и зоны пропорциональности в положения, соответствующие зоотехническим требованиям конкретного животноводческого помещения. Заключние. Применение двигателей переменного тока обусловлено их простотой, дешевизной, повышенной надежностью, существенно (в 2 Отмечая достоинства двигателей переменного тока, нельзя не обратить внимания на то, что относительно простые способы регулирования угловой скорости электроприводов переменного тока обладают и рядом недостатков, к которым можно отнести в одном случае небольшую плавность, в другом — невысокие энергетические показатели и т. д. Более эффективные способы регулирования осуществляются при помощи сравнительно сложных преобразовательных устройств и средств управления. Список используемых источников. 1) Чиликин М. Г., Общий курс электропривода: учебник для вузов / М. Г. Чиликин, А.С. Сандлер.– 6-е изд. доп. и перераб. – М.: Энергоиздат, 2014. – 576 с., с ил. 2) Основы автоматизированного электропривода: учеб. пособие для вузов / М. Г. Чиликин, М. М. Соколов, В. М. Терехов, А. В. Шинянский. – М.: Энергия, 1974. –568 с., с ил. 3) Чиликин М. Г. Теория автоматизированного электропривода: учеб. пособие для вузов / М. Г. Чиликин, В. И. Ключев, А. С. Сандлер. – М.: Энергия, 2015. – 616 с., с ил. 4) Вешеневский С. Н. Характеристики двигателей в электроприводе. / С. Н. Вешеневский. – 6-е изд., исправленное. – М.: Энергия, 2014. – 432 с., с ил. 5) Зимин Е.Н. Автоматическое управление электроприводами: учеб. пособие для студентов вузов. / Е. Н. Зимин, В.И. Яковлев. – М.: Высш. школа, 2015. – 318 с., с ил. 6) Андреев В. П. Основы электропривода: учеб. пособие для студентов вузов. / В. П. Андреев. 2-е изд., перераб. – М.: Энергия, 2014. – 772 с., с ил. 7) Ключев В. И. Электропривод и автоматизация общепромышленных механизмов: учебник для вузов. / В. И. Ключев, В. М. Терехов. – М.: Энергия, 2015. – 360 с., с ил. Приложение. Приложение А.  Схема включения (а) и механические характеристики (б) СД. Приложение В.  Угловая характеристика СД Приложение С.  Приложение D. П  риложение Е. риложение Е.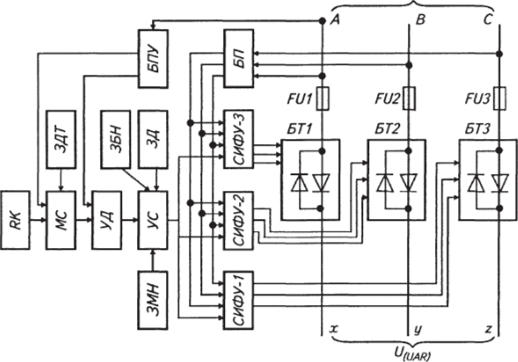 |