Реферат. Контрольная работа Тема и название работы Планирование в системах реального времени, политика и механизмы, планирование потоков
 Скачать 103.96 Kb. Скачать 103.96 Kb.
|

 Ордена Трудового красного знамени ФГБО УВО Московский технический университет связи и информатики Заочный общетехнический факультет. Контрольная работа Тема и название работы: Планирование в системах реального времени, политика и механизмы, планирование потоков. Выполнил: Крянин Сергей Михайлович Номер группы: БСТ1851 Оглавление1 Ордена Трудового красного знамени ФГБО УВО 1 Планирование 3 Введение в планирование 3 Понятия «процесс» и «поток» 4 Планирование в системах реального времени 5 Моменты перепланировки 8 Планирование 3 Введение в планирование 3 Понятия «процесс» и «поток» 4 Планирование в системах реального времени 5 Моменты перепланировки 8 ПланированиеКогда компьютер работает в многозадачном режиме, на нем зачастую запускается сразу несколько процессов и потоков, претендующих на использование центрального процессора. Такая ситуация складывается в том случае, если в состоянии готовности одновременно находятся два или более процесса или потока. Если доступен только один центральный процессор , необходимо выбрать, какой из этих процессов будет выполняться следующим. Та часть операционной системы, на которую возложен этот выбор, называется планировщиком, а алгоритм, который ею используется, называется алгоритмом планирования. Многие однотипные вопросы, применяемые к планированию процессов, также могут применяться и к планированию потоков, хотя существуют некоторые различия. Когда ядро управляет потоками, то планирование обычно касается каждого из потоков, практически не различая, какому именно процессу они принадлежат. Введение в планированиеЕсли вернуться к прежним временам пакетных систем, где ввод данных осуществлялся в форме образов перфокарт, перенесенных на магнитную ленту, то алгоритм планирования был довольно прост: требовалось всего лишь запустить следующее имеющиеся на ленте задание. С появлением многозадачных систем алгоритм планирования усложнился, поскольку в этом случае обычно фигурировали сразу несколько пользователей, ожидавших обслуживания. С появлением персональных компьютеров ситуация изменилась в двух направлениях. Во-первых, основная часть времени отводилась лишь одному активному процессу. Во-вторых, с годами компьютеры стали работать настолько быстрее, что центральный процессор практически перестал быть дефицитным ресурсом. Поэтому на простых персональных компьютерах планирование не играет особой роли. Когда же дело касается сетевых служб, ситуация существенно изменяется. Здесь в конкурентную борьбу за процессорное время вступает уже несколько процессов, поэтому планирование снова приобретает значение. Планировщик, кроме выбора «правильного» процесса, должен также заботиться об эффективной загрузке центрального процессора, поскольку переключение процессов является весьма дорогостоящим занятием. Сначала должно произойти переключение из пользовательского режима в режим ядра. Затем должно быть сохранено состояние текущего процесса, включая сохранение его регистров в таблице процессов для их последующей повторной загрузки. Во многих системах должна быть также сохранена и карта памяти. После этого запускается алгоритм планирования для выбора следующего процесса. Затем в соответствии с картой памяти нового процесса должен быть перезагружен блок управления памятью. И наконец, новый процесс должен быть запущен. Вдобавок ко всему перечисленному переключение процессов обесценивает весь кэш памяти, заставляя его дважды динамически перегружаться из оперативной памяти. В итоге слишком частое переключение может поглотить существенную долю процессорного времени. Понятия «процесс» и «поток»Чтобы поддерживать мультипрограммирование, ОС должна определить и оформить для себя те внутренние единицы работы, между которыми будет разделяться процессор и другие ресурсы компьютера. В настоящее время в большинстве операционных систем определены два типа единиц работы. Более крупная единица работы, обычно носящая название процесса, или задачи, требует для своего выполнения нескольких более мелких работ, для обозначения которых используют термины «поток», или «нить». Очевидно, что любая работа вычислительной системы заключается в выполнении некоторой программы. Поэтому и с процессом, и с потоком связывается определенный программный код, который для этих целей оформляется в виде исполняемого модуля. Чтобы этот программный код мог быть выполнен, его необходимо загрузить в оперативную память, возможно, выделить некоторое место на диске для хранения данных, предоставить доступ к устройствам ввода-вывода, например к последовательному порту для получения данных по подключенному к этому порту модему; и т. д. В ходе выполнения программе может также понадобиться доступ к информационным ресурсам, например файлам, портам TCP/UPD, семафорам. И, конечно же, невозможно выполнение программы без предоставления ей процессорного времени, то есть времени, в течение которого процессор выполняет коды данной программы. В операционных системах, где существуют и процессы, и потоки, процесс рассматривается операционной системой как заявка на потребление всех видов ресурсов, кроме одного — процессорного времени. Этот последний важнейший ресурс распределяется операционной системой между другими единицами работы — потоками, которые и получили свое название благодаря тому, что они представляют собой последовательности (потоки выполнения) команд. В простейшем случае процесс состоит из одного потока, и именно таким образом трактовалось понятие «процесс» до середины 80-х годов (например, в ранних версиях UNIX) и в таком же виде оно сохранилось в некоторых современных ОС. В таких системах понятие «поток» полностью поглощается понятием «процесс», то есть остается только одна единица работы и потребления ресурсов — процесс. Мультипрограммирование осуществляется в таких ОС на уровне процессов. Для того чтобы процессы не могли вмешаться в распределение ресурсов, а также не могли повредить коды и данные друг друга, важнейшей задачей ОС является изоляция одного процесса от другого. Для этого операционная система обеспечивает каждый процесс отдельным виртуальным адресным пространством, так что ни один процесс не может получить прямого доступа к командам и данным другого процесса. Планирование в системах реального времениВ системах реального времени, в которых главным критерием эффективности является обеспечение временных характеристик вычислительного процесса, планирование имеет особое значение. Любая система реального времени должна реагировать на сигналы управляемого объекта в течение заданных временных ограничений. Необходимость тщательного планирования работ облегчается тем, что в системах реального времени весь набор выполняемых задач известен заранее. Кроме того, часто в системе имеется информация о временах выполнения задач, моментах активизации, предельных допустимых сроках ожидания ответа и т. д. Эти данные могут быть использованы планировщиком для создания статического расписания или для построения адекватного алгоритма динамического планирования. При разработке алгоритмов планирования для систем реального времени необходимо учитывать, какие последствия в этих системах возникают при несоблюдении временных ограничений. Если эти последствия катастрофичны, как, например, для системы управления полетами или атомной электростанцией, то операционная система реального времени, на основе которой строится управление объектом, называется жесткой (hard). Если же последствия нарушения временных ограничений не столь серьезны, то есть сравнимы с той пользой, которую приносит система управления объектом, то система является мягкой (soft) системой реального времени. Примером мягкой системы реального времени является система резервирования билетов. Если из-за временных нарушений оператору не удается зарезервировать билет, это не очень страшно — можно просто послать запрос на резервирование заново. В жестких системах реального времени время завершения выполнения каждой из критических задач должно быть гарантировано для всех возможных сценариев работы системы. Такие гарантии могут быть даны либо в результате исчерпывающего тестирования всех возможных сценариев поведения управляемого объекта и управляющих программ, либо в результате построения статического расписания, либо в результате выбора математически обоснованного динамического алгоритма планирования. При построении расписания надо иметь в виду, что для некоторых наборов задач в принципе невозможно найти расписания, при котором бы удовлетворялись заданные временные характеристики. С целью определения возможности существования расписания могут быть использованы различные критерии. Например, в качестве простейшего критерия может служить условие, что разность между предельным сроком выполнения задачи (после появления запроса на ее выполнение) и временем ее вычисления (при условии непрерывного выполнения) всегда должна быть положительной. Очевидно, что такой критерий является необходимым, но недостаточным. Точные критерии, гарантирующие наличие расписания, являются очень сложными в вычислительном отношении. В мягких системах реального времени предполагается, что заданные временные ограничения могут иногда нарушаться, поэтому здесь обычно применяются менее затратные способы планирования. В зависимости от характера возникновения запросов на выполнение задач полезно разделять их на два типа: периодические и спорадические. Начиная с момента первоначального запроса все будущие моменты запроса периодической задачи можно определить заранее путем прибавления к моменту начального запроса величины, кратной известному периоду. Времена запросов на выполнение спорадических задач заранее не известны. Предположим, что имеется периодический набор задач {Тi} с периодами рi предельными сроками di и требованиями ко времени выполнения ci. Для проверки возможности существования расписания достаточно проанализировать расписание на периоде времени, равном по крайней мере наименьшему общему множителю периодов этих задач. Необходимым критерием существования расписания для набора периодических задач является следующее достаточно очевидное утверждение: сумма коэффициентов использования mi= сi/рi должна быть меньше или равна k, где k — количество доступных процессоров, то есть: mi=Sum(ci/pi)<=k При выборе алгоритма планирования следует учитывать данные о возможной зависимости задач. Эта зависимость может выступать, например, в виде ограничений на последовательность выполнения задач или их синхронизации, вызванной взаимными исключениями (запрете выполнения некоторых задач в течение определенных периодов времени). С практической точки зрения алгоритмы планирования зависимых задач более важны, чем алгоритмы планирования независимых задач. При наличии дешевых микроконтроллеров нет смысла организовывать мультипрограммное выполнение большого количества независимых задач на одном компьютере, так как при этом значительно возрастает сложность программного обеспечения. Обычно одновременно выполняющиеся задачи должны обмениваться информацией и получать доступ к общим данным для достижения общей цели системы, то есть являются зависимыми задачами. Поэтому существование некоторого предпочтения последовательности выполнения задач или взаимного исключения — это скорее норма для систем управления реального времени, чем исключение. Проблема планирования зависимых задач очень сложна, нахождение ее оптимального решения требует больших вычислительных ресурсов, сравнимых с теми, которые требуются для собственно выполнения задач управления. Решение этой проблемы возможно за счет следующих мер: Разделение проблемы планирования на две части, чтобы одна часть выполнялась заранее, перед запуском системы, а вторая, более простая часть — во время работы системы. Предварительный анализ набора задач с взаимными исключениями может состоять, например, в выявлении так называемых запрещенных областей времени, в течение которых нельзя назначать выполнение задач, содержащих критические секции. Введение ограничивающих предположений о поведении набора задач. При таком подходе планирование приближается к статическому. Возвращаясь к планированию независимых задач, рассмотрим классический алгоритм для жестких систем реального времени с одним процессором, разработанный в 1973 году Лью (Liu) и Лейландом (Layland). Алгоритм является динамическим, то есть он использует вытесняющую многозадачность и основан на относительных статических (неизменяемых в течение жизни задачи) приоритетах. Алгоритм основан на следующих предположениях: Запросы на выполнение всех задач набора, имеющих жесткие ограничения на время реакции, являются периодическими. Все задачи независимы. Между любой парой задач не существует никаких ограничений на предшествование или на взаимное исключение. Срок выполнения каждой задачи равен ее периоду pi. Максимальное время выполнения каждой задачи ci известно и постоянно. Время переключения контекста можно игнорировать. Максимальный суммарный коэффициент загрузки процессора X ci/pi при существовании п задач не превосходит n(21/n - 1). Эта величина при стремлении n к бесконечности приблизительно равна In 2, то есть 0.7. Суть алгоритма состоит в том, что всем задачам назначаются статические приоритеты в соответствии с величиной их периодов выполнения. Задача с самым коротким периодом получает наивысший приоритет, а задача с наибольшим периодом выполнения получает наименьший .приоритет. При соблюдении всех ограничений этот алгоритм гарантирует выполнение временных ограничений для всех задач во всех ситуациях. Если же периоды повторения задач кратны периоду выполнения самой короткой задачи, то требование к максимальному коэффициенту загрузки процессора смягчается — он может доходить до 1. Существуют также алгоритмы с динамическим изменением приоритетов, которые назначаются в соответствии с такими текущими параметрами задачи как, например, конечный срок выполнения (deadline). При необходимости назначения некоторой задачи на выполнение выбирается та, у которой текущее значение разницы между конечным сроком выполнения и временем, требуемым для ее непрерывного выполнения, является наименьшим. Моменты перепланировкиДля реализации алгоритма планирования ОС должна получать управление всякий раз, когда в системе происходит событие, требующее перераспределения процессорного времени. К таким событиям могут быть отнесены следующие: Прерывание от таймера, сигнализирующее, что время, отведенное активной задаче на выполнение, закончилось. Планировщик переводит задачу в состояние готовности и выполняет перепланирование. Активная задача выполнила системный вызов, связанный с запросом на ввод-вывод или на доступ к ресурсу, который в настоящий момент занят (например, файл данных). Планировщик переводит задачу в состояние ожидания и выполняет перепланирование. Активная задача выполнила системный вызов, связанный с освобождением ресурса. Планировщик проверяет, не ожидает ли этот ресурс какая-либо задача. Если да, то эта задача переводится из состояния ожидания в состояние готовности. При этом, возможно, что задача, которая получила ресурс, имеет более высокий приоритет, чем текущая активная задача. После перепланирования более приоритетная задача получает доступ к процессору, вытесняя текущую задачу. Внешнее (аппаратное) прерывание1, которое сигнализирует о завершении периферийным устройством операции ввода-вывода, переводит соответствующую задачу в очередь готовых, и выполняется планирование. Внутреннее прерывание сигнализирует об ошибке, которая произошла в результате выполнения активной задачи. Планировщик снимает задачу и выполняет перепланирование. При возникновении каждого из этих событий планировщик выполняет просмотр очередей и решает вопрос о том, какая задача будет выполняться следующей. Помимо указанных существует и ряд других событий (часто связанных с системными вызовами), требующих перепланировки. Например, запросы приложений и пользователей на создание новой задачи или повышение приоритета уже существующей задачи создают новую ситуацию, которая требует пересмотра очередей и, возможно, переключения процессора. На рис. 4.11 показан фрагмент временной диаграммы работы планировщика в системе, где одновременно выполняются четыре потока. В данном случае неважно, по какому правилу выбираются потоки на выполнение и каким образом изменяются их приоритеты. Существенное значение имеют лишь события, вызывающие активизацию планировщика. Первые четыре цикла работы планировщика, приведенные на рисунке, были инициированы прерываниями от таймера по истечении квантов времени (эти события обозначены на рисунке как Т). Следующая передача управления планировщику была осуществлена в результате выполнения потоком 3 системного запроса на ввод-вывод (событие I/O). Планировщик перевел этот поток в состояние ожидания, а затем переключил процессор на поток 2. Поток 2 полностью использовал свой квант, произошло прерывание от таймера, и планировщик активизировал поток 1. При выполнении потока 1 произошло событие R — системный вызов, в результате которого освободился некоторый ресурс (например, был закрыт файл). Это событие вызвало перепланировку потоков. Планировщик просмотрел очередь ожидающих потоков и обнаружил, что поток 4 ждет освобождения данного ресурса. Этот поток был переведен в состояние готовности, но поскольку приоритет выполняющегося в данный момент потока 1 выше приоритета потока 4, планировщик вернул процессор потоку 1. 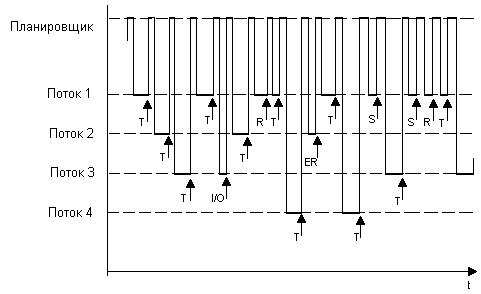 Рис. 4.11. Моменты перепланировки потоков В следующем цикле работы планировщик активизировал поток 4, а затем, после истечения кванта и сигнала от таймера, управление получил поток 2. Этот поток не успел использовать свой квант, так как был снят с выполнения в результате возникшей ошибки (событие ER). Далее планировщик предоставлял процессорное время потокам 1, 4 и снова 1. Во время выполнения потока 1 произошло прерывание S от внешнего устройства, сигнализирующее о том, что операция передачи данных завершена. Это событие активизировало работу планировщика, в результате которой поток 3, ожидавший завершения ввода-вывода, вытеснил поток 1, так как имел в этот момент более высокий приоритет. Последний показанный на диаграмме период выполнения потока 1 прерывался несколько раз. Вначале это было прерывание от внешнего устройства (S), затем программное прерывание (R), вызвавшее освобождение ресурса, и, наконец, прерывание от таймера (Т). Каждое из этих трех прерываний вызвало перепланировку потоков. В двух первых случаях планировщик оставил выполняться поток 1, так как в очереди не оказалось более приоритетных потоков, а квант времени, выделенный потоку 1, еще не был исчерпан. Переключение потоков было выполнено только по прерыванию от таймера. В системах реального времени для отработки статического расписания планировщик активизируется по прерываниям от таймера. Эти прерывания пронизывают всю временную ось, возникая через короткие постоянные интервалы времени. После каждого прерывания планировщик просматривает расписание и проверяет, не пора ли переключить задачи. Кроме прерываний от таймера в системах реального времени перепланирование задач может происходить по прерываниям от внешних устройств — различного вида датчиков и исполнительных механизмов. |