Курс лекций по дисциплине Грузоподъемные механизмы и транспортные средства 2021 г Содержание Стр. Назначение учебного пособия 3 Введение 4
 Скачать 4.35 Mb. Скачать 4.35 Mb.
|

ЗадачаРассчитать и выбрать стальной канат для лебедки с тяговым усилием F = 125 кН Решение: 1 Предварительно задаемся диаметром каната d к = 30мм Тогда находим k с учетом диаметра барабана лебедки Дл = 800мм k = Дл/dк k = 800/30 = 26,7 по таблицам Правил Госгортехнадзора принимаем k > 3 и определяем расчетное разрывное усилие Р каната P > F x k P > 125 x 3 = 375 кН По сортаменту канатов ГОСТ 7668-80 выбираем канат, разрывное усилие которого Р=396кН, dк = 27мм 396кН > 375 кН При этом k = Дл/dк = 800/ 27 = 29,6 т.е. канат выбран верно 1.3.2 Рабочие единицы грузоподъемных машинК рабочим единицам грузоподъемных машин относятся детали и узлы, воспринимающие усилия от гибких элементов: блоки, звездочки, барабаны, тормозные устройства, остановы. 1.3.2.1 Блоки и звездочки служат для изменения направления движения и передачи крутящего момента от вала гибкому элементу. На ободе блока выполняют желобок для размещения каната. Звездочки должны передавать крутящий момент цепи, ее диаметр с числом зубьев z зависит от шага цепи. D = t / sin (180/z) Блоки и звездочки изготавливают литыми или из проката (сталь марок Ст4, Ст5). 1.3.2.2 Барабаны 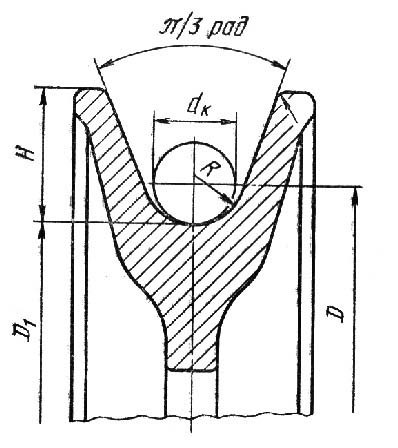 Рисунок 26 Канатный блок 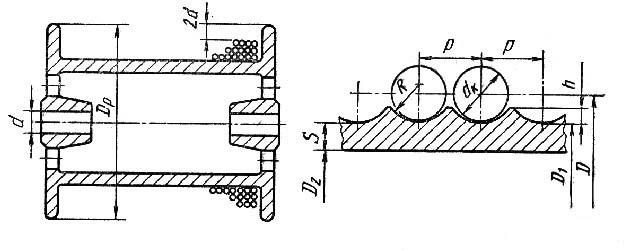 а) гладкий б) нарезной Рисунок 27 Барабан Служат для навивки каната и преобразуют крутящий момент на валу в тяговое усилие в канате. Выполняют литыми или сварными из сталей 35Л, 55Л ГОСТ 977-75 или чугуна СЧ15, СЧ18, СЧ24. 1.3.2.3 Устройства тормозные Служат для замедления скорости движения механизмов и их останова. Классификация: а) По конструкции колодочные - рабочим элементом является колодки, трущиеся по наружной поверхности барабана ленточные – с рабочим элементом в виде дисков б) По назначению стопорные – останавливают механизм в конце движения регуляторные –ограничивают скорость движения в заданных пределах в) По принципу действия автоматические – срабатывают при выключении привода движения управляемые – включаются рукояткой Должны быть: - просты по конструкции технологичны удобны ремонтопригодны надежны иметь большой срок службы 1.3.2.3 Остановы Это устройства, предназначенные для удержания груза в подвешенном состоянии. Они являются сборочной единицей тормозных устройств . По конструкции выполняются: Храповые. При останове механизма собачка входит во впадину между зубьев храпового колеса (рис.28) Фрикционные. Ролики поз.3 при торможении входят в узкую часть паза втулки поз.2 при вращении ее в противоположную сторону корпуса поз.1. Более быстрое заклинивание обеспечивают пружины поз.5 и штифт поз.4 Устройства, предназначенные для удержания груза в подвешенном состоянии. Они являются сборочной единицей тормозных устройств (рис.28,в). 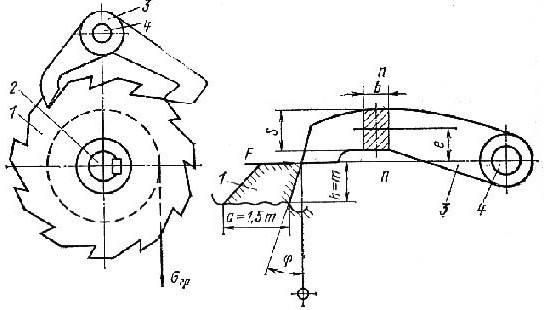 а) Схема храпового останова б) его расчетная схема 1- храповое колесо 2- вал 3- собачка 4- ось 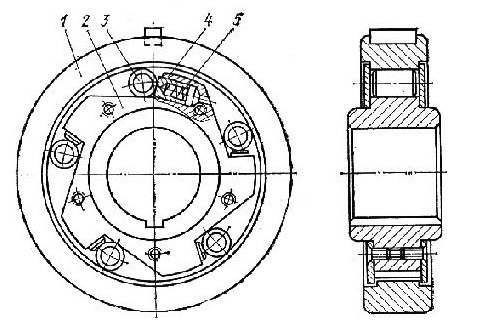 в) роликовый останов Рисунок 28 Остановы .1.4 Приводы ГПМВ зависимости от типа, назначения и характера работ ГПМ имеют ручной и машинный привод Машинный – электромеханический, гидравлический, пневматический и комбинированный. Наиболее распространен электромеханический. 1.4.1 Ручной привод принимают в машинах малой грузоподъемности, с с малыми скоростями передвижения. В качестве приводного элемента применяют рукоятки или тяговые колеса ( цепной блок со сварной цепью ) 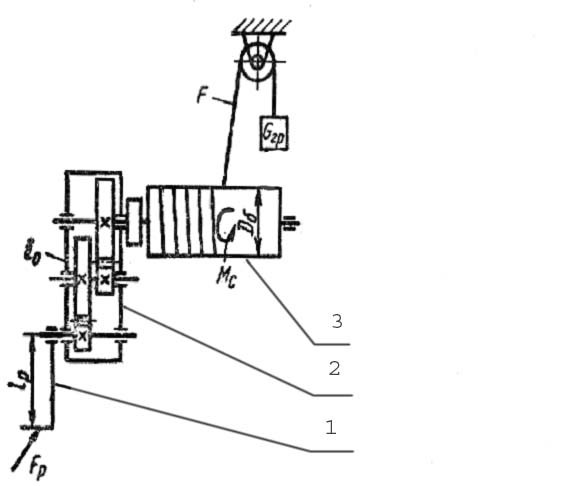 Рисунок 29 Схема механизма с ручным приводом На барабан поз.3 наматывается канат с подвешенным к нему грузом. Барабан вращается рукояткой поз.1 через редуктор поз.2 1.4.2 Электропривод Состоит из электродвигателя, аппаратуры для его управления и редуктора. В ГПМ применяются специальные крановые двигатели постоянного тока серии Д, общепромышленные - серии 2П и двигатели переменного тока с фазовым ротором серий MTF и МТА. Наиболее применимы двигатели постоянного тока, которые позволяют регулировать скорость и имеют большое число включений. Требования к двигателям: не должны нагреваться должны обеспечивать разгон механизмов ГПМ при малой мощности 1.4.3 Гидропривод Энергоносителем является жидкость, которая насосом подается в силовой гидроцилиндр, а скорость перемещения поршня регулируется дросселем. Гидроцилиндр – это гидродвигатель с возвратно-поступательным движением подвижных звеньев одно- и двустороннего действмя. Гидропривод имеет ряд преимуществ: большая перегрузочная способность бесступенчатое регулирование скорости перемещений возможность дистанционного управления малые размеры при большой мощности Преимущества: высокий к.п.д. возможность дистанционного управления малые габариты и масса при высокой мощности бесступенчатое регулирование скоростей автоматизация процесса Недостатки: сложность конструкции наличие уплотнений из-за утечки жидкости ухудшение работы при низких температурах 1.4.4 Пневмопривод Широкого применения не нашел. Используется в подъемниках и мелких кранах с малой высотой подъема и для работы во взрывоопасной среде, где нельзя применять электропривод. Рабочей средой является сжатый воздух, вырабатываемый компрессором. Подобен гидроприводу. Преимущества: простота конструкции и эксплуатации плавность работы удобство и легкость управления надежность простота регулирования скорости перемещений Недостатки: наличие трубопровода - низкий к.п.д. утечки воздуха 1.4.5 Механизм подъема груза 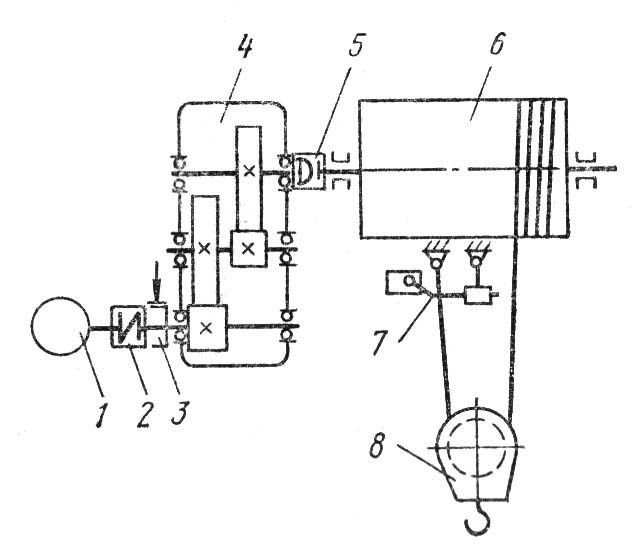 – электродвигатель – муфта – тормоз – редуктор – муфта – барабан – ограничитель – крюк Рисунок 30 Схема механизма подъема груза Этот механизм является основным механизмом ГПМ для перемещения груза в вертикальном направлении. Движение от электродвигателя передается через редуктор барабану, который наматывает и разматывает канат с крюком. 1.4.6 Механизм изменения вылета стрелы 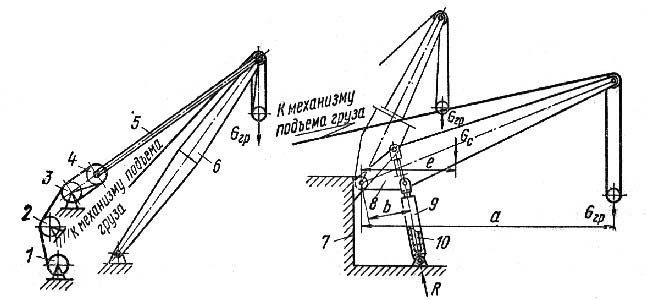 а) стрелоподдерживающей полиспастной системой б) с силовым гидроцилиндром Рисунок 31 Схема механизма вылета стрелы Применяется у стреловых кранов. Изменение вылета ( угла наклона ) стрелы осуществляется винтовыми, реечными, шатунно-кривошипными, канатными и гидравлическими механизмами. Наиболее применимы канатный и гидравлический. Канатный подобен механизму подъема груза. Отличие в том, что рабочим органом является полиспаст, связанный тягами с оголовком стрелы крана. На кранах с гидроприводом изменение вылета стрелы осуществляется при помощи гидропривода. 1.4.7 Механизмы передвижения Это устройства для передвижения крана или тележки по горизонтальному или наклонному пути. Механизмы передвижения подразделяются на два вида: с приводными колесами с канатной или цепной тягой 1.4.7.1 Механизмы передвижения с приводными колесами Краны и тележки опираются на ходовые колеса. Колеса, соединенные с приводом называются приводными ( ведущими ). А остальные – холостые (ведомые). По конструкции различают механизмы: с тихоходными со среднеходными с быстроходными трансмиссионными валвми Трансмиссионный вал – вал, выполненный из отдельных секций, соединенных муфтами и установленных в подшипники Тихоходный механизм. 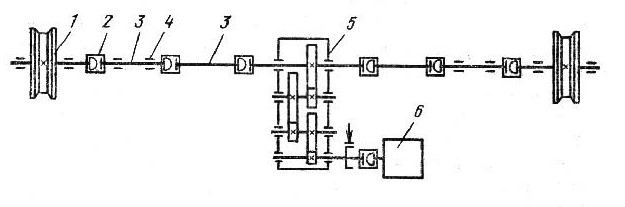 1- ходовые колеса 2- муфта 3- трансмиссионный вал 4- опора вала 5- редуктор 6- электродвигатель Рисунок 32 Схема механизма с тихоходным трансмиссионным валом Это механизм, у которого привод расположен в средней части моста и состоит из электродвигателя, муфт и редуктора. Выходной вал редуктора связан через муфту с трансмиссионным валом, а он соединен через муфты с валом приводных колес. Трансмиссионный вал имеет ту же частоту вращения, что и ходовые колеса. Быстроходный механизм. 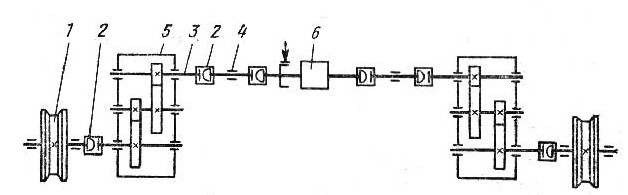 Рисунок 33 Схема механизма с быстроходным трансмиссионным валом Механизм, у которого трансмиссионный вал связан с валом электродвигателя и имеет частоту вращения, равную частоте вращения электродвигателя. А для передачи вращения на колеса применяют два одинаковые редукторы с заданным передаточным числом. Выходной вал редуктора соединен через муфту с валом ходовых колес. 1.4.7.2 Механизм передвижения с раздельным приводом 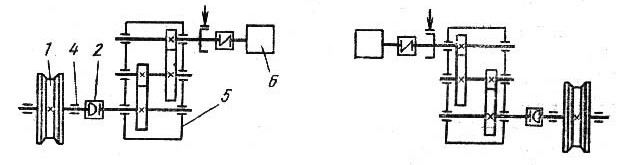 Рисунок 34 Схема механизма с раздельным приводом Наличие двух редукторов и длинных трансмиссионных валов усложняет и удорожает конструкцию механизма. Поэтому более часто применяют механизмы с раздельным приводом, которые не имеют трансмиссионного вала. Каждая концевая балка моста приводится в действие отдельным приводом, т.е. этот механизм имеет два электродвигателя, два тормозных устройства, два редуктора. Применяют их для кранов с пролетом более 16 метров. Скорость движения обеих балок моста выравнивается автоматически и нагрузка перераспределяется между двигателями за счет жесткости металлоконструкции моста и сил сцепления колес с рельсами. Ходовые колеса Служат для перемещения крана по рельсовым путям и ограничивают сход крана с кранового пути. Выполняются из сталей 75 и 65Г ГОСТ 4543-71 или чугунные цельнокатаные или штампованные. Колеса имеют один или два боковых выступа для направления движения колеса по рельсовому пути. Поверхность катания ( обод ) колеса может быть цилиндрической или конической с уклоном 1:20.Твердость поверхности катания не менее 350 НВ. Колеса без бокового выступа применяются с направляющими роликами. Количество колес зависит от грузоподъемности и пролета крана. У кранов небольшой грузоподъемности применяются четыре ходовых колеса. У кранов с большой грузоподъемностью количество колес увеличивается и их устанавливают попарно. 1.4.7.3 Механизм передвижения с гибкой тягой  1- барабан 2- тележка 3- канат 4- обводной блок 5- блоки подъемного механизма 6- канат механизма подъема Рисунок 35 Схема механизма с гибкой тягой Этот механизм может перемещать тележку по наклонному пути. При передвижении тележки поз.2 барабан поз.1 вращается. При этом одна ветвь каната поз.3 сматывается с барабана, другая – наматывается. Тележка перемещается в зависимости от направления вращения барабана. На рисунке направление вращения барабана соответствует передвижению тележки вправо. При движении тележки канат поз.6 механизма подъема перемещается по блокам поз.5, а подвешенный груз перемещается вместе с тележкой. Для плавности перемещения тележки ось обводного блока поз.4 подпружинена. |