Курсовой проект ТСС Шубин Р.А. Вариант 6. Курсовая Работа Исследование работы и эксплуатационных характеристик дистанционных компасов
 Скачать 1.86 Mb. Скачать 1.86 Mb.
|

и падений напряжений на обмотках феррозондов. В связи с тем, что их векторы развернуты друг относительно друга на угол 120° то в совокупности они представляют собой трехфазное напряжение которое может быть использовано для дистанционной передачи информации системой аналогичной рассмотренной выше.Содержание Введение Общая характеристика магнитного компаса -Назначение и виды дистанционных магнитных компасов -ТТД КМ 145 комплект приборов -Следящая схема компаса Подготовка МК к рейсу -Проверка котелка МК и пеленгатора Расчет переходного процесса картушки Анализ кривой девиации магнитного компаса Анализ работы следящей системы Оценкка необходимой точности положения судна при пеленговании Измерение девиации МК Оценка девиации компаса в открытом море Составление таблицы остаточной девиации Анализ ситуаций наблюдаемых во время плавания Состав профилактических работ Разработка схем 13.Список литературы Введение: Магнитный компас занимает особое место среди современных технических средств судовождения. Этот древний прибор, переживший не одно тысячелетие, до сих пор несет свою службу на всех флотах мира. Объясняется это тем, что магнитный компас обладает достоинствами, свойственными очень немногим навигационным приборам. Он прост в обращении, недорог, действует автономно и, что самое главное, надежно. Безотказность действия любого прибора является очень ценным его качеством, но особенно это важно для курсоуказателя. Пока судно в море, курсоуказатель не должен выходить из строя ни на одну минуту, иначе судно теряет ориентировку и лишается возможности продолжать путь. По существующим правилам ни одно самоходное судно, какими бы новейшими техническими средствами оно ни было оборудовано, не может быть выпущено в море, если на судне отсутствует магнитный компас. В последнее время появилась возможность применения магнитного компаса в комплексных системах курсоуказания, основанных на фильтрации помех, возникающих в магнитных и гироскопических датчиках, действующих совместно. Это новый шаг в применении магнитного компаса, свойственный новому времени—веку автоматизации. Изучение магнитного компаса как прибора, овладение правилами технической его эксплуатации на судне являются неотъемлемой частью подготовки инженера-судоводителя. Каждый судоводитель должен уметь определить девиацию магнитного компаса и, если она велика, уметь уничтожить ее. 1. ОБЩАЯ ХАРАКТЕРИСТИКА ДИСТАНЦИОННОГО МАГНИТНОГО КОМПАСА. Назначение и виды дистанционных магнитных компасов. Современные МК снабжаются системой дистанционной передачи информации Наибольшее распространение получили оптические и электромеханические системы Последние более универсальны т к позволяют не только отобразить информацию на репитерах но и ввести ее в другие устройства, например РЛС авторулевые и т.п. Электромеханические системы дистанционной передачи информации МК часто дополняются электронными системами с целью преобразования аналогового сигнала в цифровой для передачи его по линиям связи и отображения на цифровых репитерах. Могут применяться цифровые системы дистанционной передачи информации с последующим преобразованием её в аналоговый сигнал для тех потребителей, которые работают с указанным видом сигнала. Рассмотрим вкратце отдельные виды систем. Оптическая система дистанционной передачи информации Оптическая система дистанционной передачи позволяет отобразить в ходовой рубке информацию о курсе судна, снятую с картушки компаса. Это может быть обеспечено путём использования специальной оптической трубы, связывающей МК с ходовой рубкой, или с помощью волоконного оптического кабеля. Схема передачи информации по оптической трубе показана на рис. Котелок 4 магнитного компаса имеет картушку 2 с прозрачной шкалой 3. Сверху котелок накрыт стеклом 1 и установлен в нактоузе 5. Шкала картушки может подсвечиваться 7, благодаря чему она хорошо видна в любое время суток. Луч света проходит через прозрачное стекло 8, оптическую систему 9, стекло 10 и далее попадает на зеркало 13, положение которого может подстраиваться под глаз наблюдателя. Оптическая труба проходит сквозь подволок 12 ходовой рубки, располагается над стойкой авторулевого и имеет подогрев с целью предотвращения запотевания стекол. Н 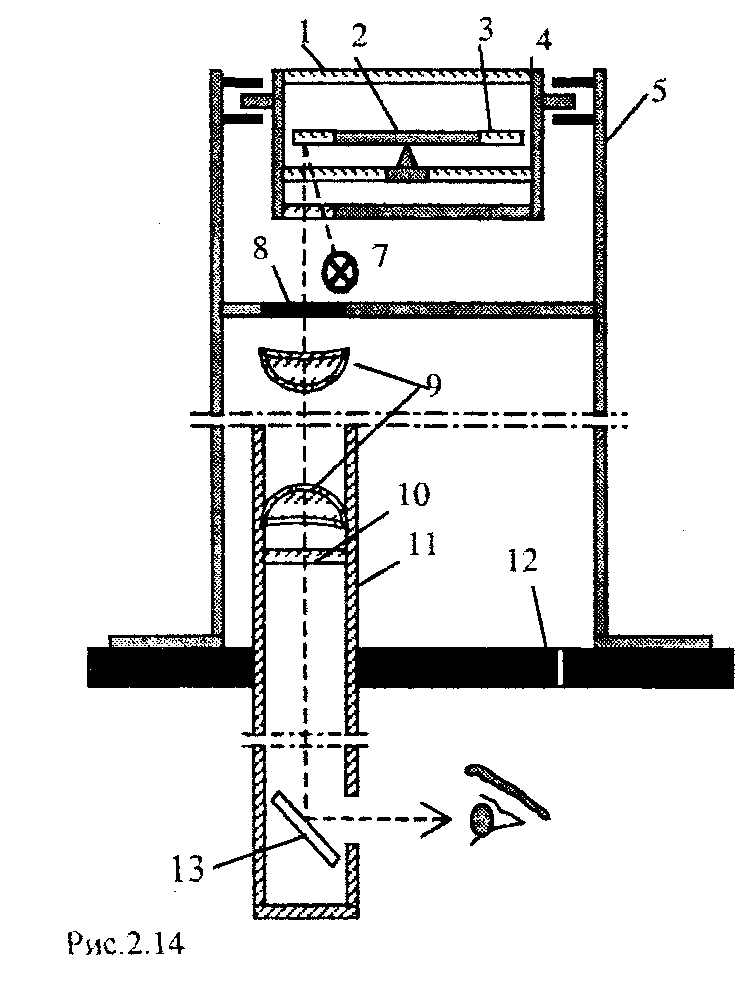 есколько иначе выглядит оптическая система передачи информации по волоконному кабелю Она имеет объектив, позволяющий проектировать небольшой сектор шкалы картушки на входной конец световода. Выходной его конец соединен с репитером, который, как правило, проектирует изображение, передаваемое по кабелю, на экран в виде матового стекла. Такой репитер позволяет видеть значение текущего курса судна нескольким наблюдателям одновременно. есколько иначе выглядит оптическая система передачи информации по волоконному кабелю Она имеет объектив, позволяющий проектировать небольшой сектор шкалы картушки на входной конец световода. Выходной его конец соединен с репитером, который, как правило, проектирует изображение, передаваемое по кабелю, на экран в виде матового стекла. Такой репитер позволяет видеть значение текущего курса судна нескольким наблюдателям одновременно.Могут иметь место и иные варианты построения оптических дистанционных передач, но они не несут в себе каких либо принципиальных отличий. Электромеханическая система, дистанционной передачи информации. Электромеханическая система дистанционной передачи информации, как правило, создается на базе индукционного датчика (ИД) ориентации картушки МК. Этот датчик содержит два или три магнитных зонда (часто их называют феррозодами), каждый из которых позволяет определить значение составляющей напряженности измеряемого магнитного поля вдоль своей оси. Совместное использование сигналов этих зондов дает возможность определить направление вектора напряженности магнитного поля, создаваемого картушкой компаса, относительно диаметральной плоскости судна Принцип действия магнитного зонда М 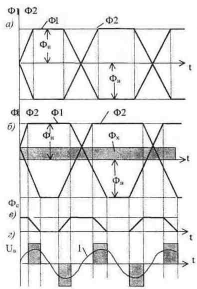  агнитный зонд имеет два сердечника 1 выполненные из магнитомягкого материала с высокой магнитной проницаемостью, например из пермаилоя. На каждый сердечник наматываются обмотки 2 и 3, имеющие одинаковое количество витков. Эти обмотки соединяются последовательно и встречно и питаются напряжением Uп переменного тока. Магнитные потоки Ф1 и Ф2, создаваемые указанны ми обмотками в любой фиксированный момент времени равны друг другу и противоположно направлены (рисунок а). Величина этих потоков подбирается таким образом чтобы стержни при любом значении напряженности измеряемого магнитного поля гарантированно переводились бы в состояние насыщения. На оба сердечника наматывается общая обмотка 4, с которой снимается выходной сигнал Uв магнитного зонда. агнитный зонд имеет два сердечника 1 выполненные из магнитомягкого материала с высокой магнитной проницаемостью, например из пермаилоя. На каждый сердечник наматываются обмотки 2 и 3, имеющие одинаковое количество витков. Эти обмотки соединяются последовательно и встречно и питаются напряжением Uп переменного тока. Магнитные потоки Ф1 и Ф2, создаваемые указанны ми обмотками в любой фиксированный момент времени равны друг другу и противоположно направлены (рисунок а). Величина этих потоков подбирается таким образом чтобы стержни при любом значении напряженности измеряемого магнитного поля гарантированно переводились бы в состояние насыщения. На оба сердечника наматывается общая обмотка 4, с которой снимается выходной сигнал Uв магнитного зонда.Принцип действия зонда состоит в следующем. При отсутствии внешнего намагничивающего поля Х результирующий магнитный поток Фс = Ф1 – Ф2, связанный с обмоткой 4, будет равен нулю и на ее выходе никакого сигнала не будет. Если напряжённость Х измеряемого поля не равна нулю, то магнитный поток Фх этого поля в одном стержне будет складываться с потоком подмагничивания, а в другом вычитаться из него. Это приведёт к тому, что оба сердечника будут переходить в режим насыщения не одновременно (рис. б), как это было при Х=0. В результате суммарный магнитный поток Фс, сцепленный с обмоткой 4, будет изменяться так, как это показано на (рис. в). Изменение потока приведет к появлению на выходной обмотке 4 напряжения U, (рис. г), пропорционального степени асимметрии потоков Ф1 и Ф2, а следовательно, и напряжённости измеряемого поля. В связи с тем, что за один период напряжения подмагничивания стержни будут переходить в насыщенное состояние два раза, частота импульсов U. будет в два раза выше частоты напряжения Un. В результате последующей фильтрации напряжение Uв преобразуется к гармоническому виду 1. Следует отметить, что фаза выходного сигнала магнитного зонда изменяется на противоположную, если вектор напряжённости измеряемого поля меняет свой знак. Структура системы дистанционной передачи информации Как уже было указано выше, ИД может содержать в своём составе два или три феррозонда, каждый из которых измеряет составляющую магнитного поля катушки вдоль оси своих сердечников. Он размещается в котелке МК под картушкой и вместе с котелком ориентируется требуемым образом относительно диаметральной плоскости судна. Е 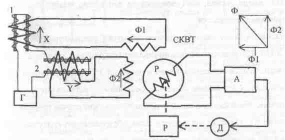 сли используется двухзондовый ИД, то ось чувствительности одного зонда устанавливается вдоль диаметральной плоскости, а другого перпендикулярно ей. В этом случае зонд 1 будет измерять продольную составляющую Х поля картушки, а зонд 2 - поперечную У. Сигнальные обмотки зондов связаны со статорными обмотками синусно-косинусного вращающегося трансформатора (СКВТ). Получая от зондов напряжение, пропорциональное указанным компонентам магнитного поля картушки, эти обмотки создают внутри СКВТ ортогональные магнитные потоки Ф1 и Ф2, образующие в сумме магнитный поток, ориентация вектора Ф которого внутри статора определяется положением картушки относительно диаметральной плоскости судна. Магнитный поток Ф индуктирует в обмотках ротора СКВТ напряжения, которые будут зависеть как от величины потока, так и направления вектора Ф относительно плоскости роторных обмоток. Если плоскость обмотки ротора параллельна вектору Ф, то ЭДС, индуктированная в ней, при любом значении его модуля будет равна нулю. Таким образом, устанавливая ротор СКВТ в такое положение, когда на одной из его обмоток сигнал постоянно будет равен нулю, мы будем отслеживать изменение ориентации картушки относительно диаметральной плоскости судна. сли используется двухзондовый ИД, то ось чувствительности одного зонда устанавливается вдоль диаметральной плоскости, а другого перпендикулярно ей. В этом случае зонд 1 будет измерять продольную составляющую Х поля картушки, а зонд 2 - поперечную У. Сигнальные обмотки зондов связаны со статорными обмотками синусно-косинусного вращающегося трансформатора (СКВТ). Получая от зондов напряжение, пропорциональное указанным компонентам магнитного поля картушки, эти обмотки создают внутри СКВТ ортогональные магнитные потоки Ф1 и Ф2, образующие в сумме магнитный поток, ориентация вектора Ф которого внутри статора определяется положением картушки относительно диаметральной плоскости судна. Магнитный поток Ф индуктирует в обмотках ротора СКВТ напряжения, которые будут зависеть как от величины потока, так и направления вектора Ф относительно плоскости роторных обмоток. Если плоскость обмотки ротора параллельна вектору Ф, то ЭДС, индуктированная в ней, при любом значении его модуля будет равна нулю. Таким образом, устанавливая ротор СКВТ в такое положение, когда на одной из его обмоток сигнал постоянно будет равен нулю, мы будем отслеживать изменение ориентации картушки относительно диаметральной плоскости судна.С этой целью, сигнал с роторной обмотки СКВТ после его усиления усилителем А поступает на двигатель Д, который через редуктор Р поворачивает ротор СКВТ. Когда сигнал, поступающий на двигатель, станет равным нулю, вращение ротора прекратится. В трёхзондовом датчике оси зондов образуют равносторонний треугольник. Их обмотки подмагничивания включаются последовательно и питаются от специального генератора переменного тока. Сигнальные обмотки соединены в треугольник и подключены к статорным обмоткам сельсина. В рассматриваемом случае измеряются три составляющие HI, H2 и НЗ магнитного поля, образованного картушкой компаса. Напряжения, пропорциональные измеренным компонентам, создают в сельсине три магнитных потока Ф1, Ф2 и ФЗ Направление вектора напряженности результирующего поля, образованного указанными потоками, будет, как и в предыдущем случае, определяться текущей ориентацией картушки МК. Ротор сельсина с помощью следящей системы, аналогичной рассмотренной выше, будет приводиться в состояние, при котором сигнал, снимаемый с его обмотки, будет равен нулю. Таким образом, осуществляется отслеживание поворотов картушки компаса и, как следствие, изменения курса судна. Наряду с описанными вариантами, могут использоваться датчики, в которых магнитный зонд имеет одну обмотку и является, по существу, переменным индуктивным сопротивлением. Величина указанного сопротивления зависит от степени подмагничивания сердечника полем магнитов картушки. Сердечники зондов L1...L3 повернуты в пространстве друг относительно друга на угол, равный 120°, аналогично тому, как это имело место в рассмотренном выше трехзондовом ИД. Степень их намагниченности, а, следовательно, и величина индуктивного сопротивления обмоток, будет зависеть от ориентации зондов по отношению к картушке МК. Спряжения на резисторах R1...R3 определяются разностью напряжения U На этом принципе фирмой Анщютц разработан магнитный зонд типа 108-010, который может быть смонтирован на любой компас не имеющий встроенной электромеханической дистанционной передачи. Зонд может быть установлен на котелке компаса как сверху так и снизу. Для центрирования установочной шайбы относительно шкалы картушки используется специальная накладка которая после наклеивания шайбы на стекло удаляется. К установочной шайбе с помощью шпилек крепится магнитный зонд. Сам котелок располагается как обычно в кольце карданова подвеса. Следует иметь в виду что выше описан лишь принцип построения дистанционных систем. Реальные устройства имеют более сложный состав позволяющий решать задачи устойчивости работы следящих систем компенсировать часть ошибок МК сравнивать его сигналы с сигналами поступающими от других курсоуказателей и т.п. Как было указано выше, описанные электромеханические синхронные системы передачи угла поворота картушки не являются единственно возможным и заведомо лучшими системами, предназначенными для решения рассматриваемой задачи. Уместно предположить, что на современном уровне развития цифровой техники использование чисто электронных систем связи может оказаться более предпочтительным. Одним из примеров такой системы является вариант дистанционной передачи, использующий емкостной преобразователь угла поворота картушки МК. Дистанционный магнитный компас содержит первичный емкостный преобразователь углового перемещения, вторичный частотный преобразователь; опорный кварцевый генератор; смеситель; формирователь однополярных импульсов, вычислительный блок; программатор; интерфейс ввода-вывода информации; цифровой индикатор и буферный регистр. Первичный преобразователь углового перемещения представляет собой конденсатор переменной емкости, ротор которого жестко связан с картушкой компаса. Он включен в схему кварцевого генератора, частота которого определяется текущим значением этой емкости, зависящей от курса судна. Таким образом, угловое перемещение картушки компаса преобразуется сначала в изменение емкости, а затем в отклонение частоты колебаний. Колебания разностей частоты, получаемые в смесителе путем смешения частот управляемого и опорного кварцевых генераторов, преобразуются формирователем импульсов в последовательность однополярных импульсов, период следования которых содержит информацию о компасном курсе судна. Эта информация обрабатывается в вычислительном блоке, с учетом значения магнитной девиации, которая вводятся в программатор штурманом через клавиатуру интерфейса ввода-вывода информации. Аналогичным образом вводятся значения магнитного склонения. Последний процесс можно автоматизировать, поскольку названные значения зависят от географического местоположения судна. Вычисленное значение истинного курса судна отображается на цифровом индикаторе и через буферный регистр выдается на вход системы автоматической прокладки курса, авторулевого, в цифровые репитеры и другие принимающие устройства. Из всех блоков функциональной схемы наиболее специфичен первичный емкостный преобразователь углового перемещения картушки компаса. К достоинствам этого преобразователя можно отнести высокую чувствительность малую инерционность малое усилие электрического взаимодействия между обкладками конденсатора, возможность получения практически любой функциональной зависимости емкости от измеряемого угла поворота простоту и технологичность конструкции малые габариты и массу. Главное же достоинство емкостных первичных преобразователей — простота порообразования измеряемой входной неэлектрической величины в частоту колебаний вторичного преобразователя (автогенератора гармонических или импульсных электрических колебаний). Известно, что частотный метод преобразования неэлектрических величин в электрические обеспечивает значительно большую точность, чем амплитудный В рассматриваемом преобразователе углового перемещения картушки компаса используется конденсатор с переменной площадью перекрытия пластин. При этом форма характеристики преобразования задается фигурной обкладкой, образующая которой выполнена в виде спирали Архимеда. Использование диэлектрика для изготовления ротора первичного преобразователя позволяет обеспечить минимальное утяжеление картушки компаса. Наиболее подходит высокочастотный диэлектрик фторопласт, отличающийся температурной устойчивостью высокой стойкостью к действию химических реагентов, незначительным старением и малым коэффициентом трения. Фторопласты марок 4Д и 42 позволяют изготавливать детали малой толщины. Благодаря частотному методу преобразования физических величин и цифровой обработке информации показания описанного магнитного компаса могут передаваться по проводам или по радио на практически любое число репитеров, непрерывно вводиться в память компьютера, использоваться при автоматической прокладке курса судна. При этом программным способом учитываются остаточная девиация и магнитное склонение. В отличие от дистанционных компасов с сельсинной передачей показаний на репитеры рассмотренное устройство бесшумно. Следует иметь в виду, что следящие системы передают информацию от картушки МК к потребителям с некоторой погрешностью, что уменьшает точность работы системы в целом. Однако их собственная погрешность, как правило значительно меньше погрешностей самого МК и ее влияние на общий результат несущественно. 1.2. Технические данные ДМК. Основные технические параметры МК с картушкой
Н – непосредственный отсчет с картушки компаса, О – отсчет с помощью оптической системы дистанционной передачи информации, ЭМ – отсчет с помощью электромеханической системы дистанционной передачи информации, Эл – электрическое освещение шкалы компаса, Мф - освещение шкалы компаса с помощью масляного фонаря * нет данных |