Курсовой проект ТСС Шубин Р.А. Вариант 6. Курсовая Работа Исследование работы и эксплуатационных характеристик дистанционных компасов
 Скачать 1.86 Mb. Скачать 1.86 Mb.
|

|
Уничтожение полукруговой девиации способом Эри Преимущественное влияние на величин девиации оказывают составляющие Р и Q, обусловленные наличием на борту судна магнитотвердых материалов. Это дает основание уничтожать полукруговую девиацию с помощью постоянных магнитов. Составляющие cZ fZ., порождаемые магнитомягкими материалами, проявляют себя, в основном, в относительно высоких широтах и при необходимости их влияние может быть устранено дополнительно. 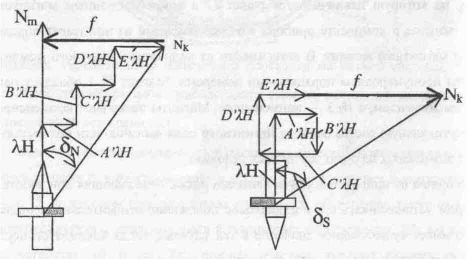 Уничтожение полукруговой девиации производится на четырех главных магнитных курсах судна. Порядок приведет судна на заданные курсы не имеет значения. Девиационные работы можно начинать с любого курса и в дальнейшем выбирать их и ходя из имеющейся навигационной обстановки и удобства маневрирования. Рассмотрим взаимную ориентацию CMC на указанных курсах. Если судно вдет на север, схема судовых магнитных сил примет вид показанный на рисунке слева. Как следует из этого рисунка, девиация N обусловлена наличием сил АH, СH, ЕH. Наша задача заключается в компенсации судовой магнитной силы СH. Но мы не знаем какую часть наблюдаемой девиации N она порождает. А поэтому с помощью постоянных поперечных магнитов, размещаемых в девиационном устройстве, приводим отсчет картушки на 0°, т.е. полностью устраняем наблюдаемую девиацию. Сила, создаваемая корректирующими магнитами в данном случае будет равна f. Для того, чтобы окончательно определить положение магнитов, при котором устраняется только сила СH необходимо перевести судно на магнитный курс 180°. Схема судовых магнитных сил, соответствующая указанному курсу, показана на рисунке справа. Результирующая сила, создающая девиацию, будет определяться следующим выражением: АH - СH + f = AH - СH + ЕH + АH + СH + ЕH = 2(АH + ЕH) Поскольку на курсе 0° была допущена перекомпенсация на величину АH + ЕH, a CMC, порождающая девиацию, равна удвоенному значению этой перекомпенсации, для ее устранения следует уменьшить наблюдаемую девиацию наполовину. Это достигается путем изменения степени влияния тех же поперечных магнитов. Следует иметь в виду, что при относительно больших значениях девиации МК уменьшение наблюдаемой девиации в два раза не вполне соответствует уменьшению наполовину судовых магнитных сил, ее порождающих. Однако, в большинстве практических случаев указанный прием вполне допустим. Для уничтожения полукруговой девиации, порождаемой судовой магнитной силой ВH, следует на курсе 90° (или 270°) с помощью продольных магнитов полностью устранить наблюдаемую девиацию, а на курсе 270° (или 90°) уменьшить ее вдвое. Способ Эри достаточно простой в реализации и позволяет качественно выполнить планируемые работы Уничтожение полукруговой девиации способом Колонга. В отличие от способа Эри в рассматриваемом случае уничтожение полукруговой девиации осуществляется на четырех главных компасных курсах При этом принимается, как правило, имеющее место на практике допущение об относительной малости СМС АH и ЕH При выполнении работ устраняется или уменьшается не наблюдаемая девиация, а непосредственно CMC ее вызывающие. С этой целью на указанные выше компасных курсах судна производится измерение горизонтальной составляющей Н судового магнитного поля. При принятых допущениях эта составляющая на курсах 0° и 180° будет определяться судовыми магнитными силами H, ВH и DH. К 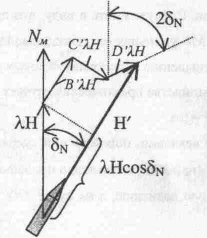 ак следует из рисунка: ак следует из рисунка:HN = H cosN + DHcosN + BH HS = H cosS + DHcosS - BH Совместное использование указанных равенств позволяет отделить силы порождающие интересующую нас полукруговую девиацию, от сил ее не порождающих. Действительно, если вычислить среднее значение 0,5(HN + HS) напряженностей магнитного поля, измеренных на противоположных курсах судна, то это значение не будет зависеть от CMC BH: Нср = 0,5(HN + HS) = (H + DH)cos Следовательно, значение силы BH будет определяться разностью между HN или HS и Нср. Напряженность судового магнитного поля измеряется с помощью дефлектора, путем компенсации измеряемого поля полем его магнитов. Принимая во внимание сказанное, становится очевидной методика устранения полукруговой девиации. Действительно, зная величину Нср и выставив ее значение на дефлекторе, установленном на пеленгаторе компаса, мы с его помощью компенсируем указанную составляющую судового магнитного поля на одном из рассматриваемых курсов (N или S). В этих условиях на картушку будет действовать только сила BH, которая осталась не скомпенсированной Названная сила устраняется с помощью продольных постоянных магнитов, расположенных в нактоузе МК. Уничтожение CMC СH производится аналогично рассмотренному на курсах 90° и 270°. 2.3. Анализ работы следящей системы.
Девиация находится по следующей формуле. = МК – КК, погрешность работы дистанционной следящей системы находится как разница между КК и К Вычисления приведем в таблице:
На основе данных таблиц, построим график зависимости Девиации и Погрешности работы дистанционной следящей системы от МК Из графика видно, что компас имеет неравномерное распределение погрешностей по всему диапазону картушки.  Р 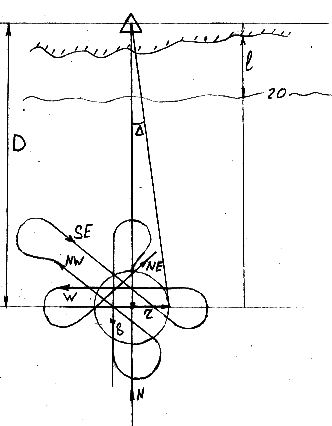 АБОТЫ, ВЫПОЛНЯЕМЫЕ В РЕЙСЕ В СЛУЧАЕ ОТКАЗА ГИРОКОМПАСА АБОТЫ, ВЫПОЛНЯЕМЫЕ В РЕЙСЕ В СЛУЧАЕ ОТКАЗА ГИРОКОМПАСАОценка необходимой точности положения судна при пеленговании. Во многих случаях постоянная девиация Поступая таким образом, следует иметь в виду, что коэффициент Все сказанное выше полностью относится и к определению девиации по пеленгам отдаленного предмета. Пользуясь вместо створа отдаленным предметом, следует учитывать то обстоятельство, что магнитный пеленг предмета изменяется при перемещении судна. Из рисунка видно, что изменение пеленга зависит от радиуса г окружности, внутри которой маневрирует судно, и расстояния D до пеленгуемого предмета. Проведем из точки Р, где находится предмет, касательную к окружности и обозначим угол между прямыми ОР и КР через . Тогда из прямоугольного треугольника РКО получим r = D x sin, откуда, если угол выражен в градусах  Величина Формула позволяет по известной величине г найти то минимальное расстояние D, при котором точность определения девиации будет лежать в указанных пределах (0,2°). Решив несколько примеров на вычисление расстояния D по известным г и , можно убедиться в том, что для точного определения девиации необходимо пеленговать предметы, находящиеся на расстоянии в 10 миль и более. Так при г = 1 кб и = 0,2° получим  мили милиНаблюдать столь удаленные предметы удается только в исключительных случаях. Поэтому на практике часто приходится использовать более близкие к судну предметы. Рассматриваемый способ применим в основном на судах малого водоизмещения, а также в тех случаях, когда судно стоит на бочке и разворачивается с помощью буксира. При работе на крупнотоннажных судах следует определять девиацию другими способами. Если это по каким-либо причинам невозможно, то перед началом наблюдений рекомендуется установить в месте определения девиации буек и на каждом курсе пеленговать предмет в тот момент, когда судно будет проходить рядом с буйком. Такая мера несколько повысит надежность определения девиации, если только буек не будет сносить течение и ветер. Измерение девиации МК. Определение девиации по пеленгам одного створа или отдаленного предмета. Пусть в пределах видимости находится створ, истинное направление ИП которого указано на навигационной карте. Требуется определить девиацию для какого-либо компасного курса. В этом случае до начала наблюдений следует снять с карты ИП створа, а также магнитное склонение d для данного района и вычислить магнитный пеленг МП по формуле МП = ИП – d. Затем нужно лечь по компасу на требуемый компасный курс КК и в момент пересечения створной линии взять КП створа. Девиация определится как разность известного магнитного и компасного пеленгов створа: = МП – КП. Если требуется определить девиацию для другого курса, то нужно лечь по компасу на этот новый курс и, вновь взяв пеленг в момент пересечения створа, вычислить девиацию. Так как по компасу фактически наблюдают не компасный пеленг КП а обратную ему величину ОКП, то девиацию вычисляют по формуле = ОМП – ОКП. Записывают наблюдаемые величины и вычисляют девиацию по схеме, приведенной в табл 1.
 Из графика видно, что девиация уменьшилась, изменив свой полукруговой характер на четвертной. Для устранения которого необходимо воспользоваться брусками круглого сечения, установленными продольно в верхней части нактоуза компаса. Изложенный способ определения девиации прост. Для его выполнения требуется сравнительно немного времени К недостаткам способа нужно отнести то, что наблюдатель не имеет возможности повторять наблюдения и контролировать правильность взятых им компасных пеленгов. Следовательно, все ошибки пеленгования целиком войдут в наблюдаемую девиацию. Случайная ошибка в определении девиации может возникнуть и вследствие отклонения судна от заданного курса. Но так как остаточная девиация компаса, т.е. девиация, наблюдаемая после уничтожения, не превосходит нескольких градусов и при перемене курса ее величина изменяется медленно, то эта ошибка не имеет практического значения. Точность определения девиации зависит также от достоверности величин истинного пеленга и магнитного склонения. Если в районе, где определяют девиацию, нет нанесенных на карту створов, то необходимо определить магнитный пеленг створа каких-либо приметных возвышенностей, мысов, зданий и т. п. С этой целью следует взять компасные пеленги естественного створа на восьми главных и четвертных компасных курсах, а затем вычислить среднее арифметическое из наблюденных КП. Эта величина будет приближенно равна магнитному пеленгу створа. Действительно, значения компасных пеленгов для восьми указанных курсов можно представить в следующем виде: КПN = МП – N; КПNЕ = МП – NЕ; …; КПNW = МП – NW При вычислении среднего значения КП величины N, NЕ, Е, ..., NW сократятся, так как каждая из них является суммой периодических функций — полукруговой и четвертной девиаций, имеющих соответственно на обратных и взаимно перпендикулярных курсах разные знаки при одинаковых абсолютных значениях. Поэтому  Полученное равенство является приближенным, так как кроме полукруговой и четвертной девиаций, в выражения N, NЕ ... входит постоянная девиация А. Поэтому  Оценка девиации компаса в открытом море. Девиация путевого компаса не может быть определена из наблюдений береговых ориентиров, так как большая часть горизонта обычно бывает закрыта стенками рубки Поэтому девиацию такого компаса выявляют, сличая его показания с показаниями главного компаса В основу данного способа положена следующая зависимость ККГЛ + ГЛ = ККП + П где ККГЛ и KKП – компасные курсы, отсчитываемые по главному и путевому компасам; ГЛ и П – девиации главного и путевого компасов. Приведенная формула является тождеством, так как ее правая и левая части представляют собой величину магнитного курса Переписав ее в виде П = ККГЛ – ККП + ГЛ, получаем рабочую формулу для определения девиации путевых компасов. Практическая часть работы, запись результатов наблюдений и вычисления выполняют так же, как и в предыдущем способе Составление таблицы остаточной девиации. Девиация, остающаяся у компаса по окончании ее уничтожения, называется остаточной. Величину остаточной девиации заносят в таблицу и используют как поправку при исправлении и переводе курсов и пеленгов. Таблица остаточной девиации (табл. 2) является официальным документом, который составляется на бланке и подписывается девиатором или капитаном судна. В таблицу записывают также коэффициенты девиации, значения составляющих Н и Z напряженности магнитного поля Земли, положение магнитов-уничтожителей и характеристику компенсаторов четвертной девиации. Таблица должна обеспечивать простую и быструю выборку девиации на любой компасный и магнитный курс. Для выполнения этого требования в нее заносят девиацию для 24 или 36 равноотстоящих компасных курсов, т. е. на курсы через 15 или 10°, При таком устройстве таблицы выбирать девиацию на любой промежуточный курс судоводитель может с достаточной точностью путем простой (линейной) интерполяции (при условии, что остаточная девиация компаса невелика). Казалось бы, наиболее естественный способ составления таблицы— это запись в нее результатов наблюдений девиации на 24 и 36 компасных курсах. Однако определение девиации на столь большом числе курсов требует затраты многих часов эксплуатационного времени, особенно при работе на крупнотоннажных судах. Кроме того, составленная подобным образом таблица может содержать ошибочные значения девиации вследствие ошибок наблюдений. Поэтому такой способ является нецелесообразным и фактически никогда не применяется. Принятый на практике метод составления таблицы разделяют на три этапа: первый —определение остаточной девиации компаса на небольшом числе равноотстоящих курсов; второй — вычисление коэффициентов девиации по ее наблюденным значениям; третий — вычисление девиации на любое число курсов по известным коэффициентам. Такой метод составления таблицы сокращает время, затрачиваемое на девиационные работы, так как определяют девиацию на малом числе курсов. Основное его достоинство заключается в том, что в процессе вычисления коэффициентов влияние случайных ошибок наблюдений, за исключением грубых промахов, сводится к минимуму, благодаря чему табличные значения девиации можно считать практически вполне надежными. Указанный метод позволяет также контролировать результаты определения девиации и тем самым повышает ответственность лиц, выполняющих работу, за качество наблюдений. На каких компасных курсах следует производить определение остаточной девиации для составления таблицы? Измерять любую физическую величину всегда нужно стремиться при таких условиях, при которых она получается максимально точной. Это полностью относится и к определению девиации. Известно, что величина девиации изменяется в связи с изменением курса. Полу круговая девиация имеет наибольшую величину на главных компасных курсах, а четвертная — на четвертных и главных. Следовательно, чтобы наблюдать девиацию в максимальном значении, необходимо определять ее на восьми главных и четвертных компасных курсах, т. е. на курсах 0,45, 90, ..., 315°. Другим требованием, от которого зависит выбор курсов при определении девиации, является простота вычислительной работы по составлению таблицы девиации. В дальнейшем мы увидим, что этому требованию полностью удовлетворяют те же равноотстоящие главные и четвертные компасные курсы. Наконец, наблюдать девиацию на указанных курсах важно еще и потому, что эти курсы содержатся в таблице девиации. Сравнивая результаты определений с табличными значениями девиации на одноименных курсах, можно контролировать точность наблюдений и вычислений девиации и в случае выявления ошибок повторить наблюдения или исправить ошибки вычислений. Итак, определять остаточную девиацию для составления таблицы следует на восьми главных и четвертных компасных курсах. Таблица девиации дана в приложении 1.  Приложение 1 Таблица по расчету коэффициентов девиации.
Приложение 2 Таблица по расчету значений остаточной девиации.
3.5. Анализ ситуаций, наблюдаемых во время плавания. В процессе изменения курса судна шкала центрального репитера МК двигается неравномерно, временами останавливаясь. Неисправность работы центрального репитера может быть вызвана несколькими причинами: одной из главнейшей является сельсин-приемник М1 выдает не тот сигнал (проблема с щетками); не отрабатывает двигатель М2 (тех. неполадка); не отрабатывает дифференциальный датчик Д2; барахлит сельсин-датчик синхронной передачи М3; проблема с дифференциальным сельсином М4. 4. Техническое обслуживание МК 4.1. Состав профилактических работ. В рейсе обслуживание компаса производит штурман судна или лицо ответственное за его эксплуатацию. При этом производятся следующие операции: включение и выключение компаса по инструкции; наблюдение за тем, чтобы шкалы всех репитеров вращались в одну сторону при изменении курса. При нарушении нормальной работы одного из репитеров следует отключить соответствующий предохранитель до восстановления работоспособности; при изменении района плавания или курса производить ввод соответствующей поправки. раз в месяц производить работы по уменьшению полукруговой и четвертной девиации. 4.2. Разработка схем. Схема поиска неисправностей : Проверить механическую связь двигателя М1 и сельсина-датчика В3; Проверить соединительные провода с выхода усилителя А2 на обмотку двигателя М1; Если все исправно – заменить усилитель А1.   Заключение:В ходе выполнения настоящего курсового проекта мною были изучены различные виды дистанционных магнитных компасов, их назначение, устройство и тактико-технические данные. Были приобретены навыки надежной эксплуатации данных приборов, а также выявления и последующего устранения неисправностей, присущих дистанционным магнитным компасам. В том числе снижение, уничтожение, или принятие к учету всех видов девиации. Знания, полученные в результате, являются незаменимыми для судоводителей при исполнении своих обязанностей. Список литературыКожухов В.П., Воронов В.В, Григорьев В.В., «Магнитные компасы»: Учебник для ВУЗов морск. трансп. – М.: Транспорт, 1981,-212с. Воронов В.В, Перфильев В.К., Яловенко А.В. «Технические средства судовождения: Конструкция и эксплуатация: Учебник для ВУЗов – М.: Транспорт, 1988-335с. 23 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||