Курсовая работа. Курсовая работа Нейронечеткая система контроля температуры воздуха в помещении с использованием fuzzy controller Дисциплина Нейроинформатика и нейроуправление
 Скачать 445.47 Kb. Скачать 445.47 Kb.
|

|
Санкт-Петербургский Политехнический Университет Петра Великого Институт Компьютерных Наук и Технологий Высшая Школа Киберфизических Систем и Управления Курсовая работа Нейро-нечеткая система контроля температуры воздуха в помещении с использованием fuzzy controller Дисциплина: Нейроинформатика и нейроуправление Работу выполнил _____________ Гуртовая А.М. студент гр. 13543/3 Работу принял д.т.н., ____________ Шкодырев В.П. профессор «___»_____________ 2017 г. Санкт-Петербург 2017 Содержание
Введение С развитием промышленности, ростом производства различного рода продукции, появлением мощных компьютеров, вычислительной техники и разнообразных машин появляется большое количество параметров, деталей и производственных ситуаций, за которыми необходимо наблюдать. Подобный контроль со стороны человека исключает возникновение сбоев процесса и аварийных ситуаций, которые могут привести к катастрофам, а в некоторых случаях и человеческим жертвам. Однако контролировать большие информационные ресурсы в одиночку становится сложно, и человек перестает справляться с задачей диспетчера. Появляется такое понятие, как человеческий фактор. Во избежание таких случаев создаются распределенные системы управления, которые используют искусственный интеллект для контроля системы. Одним из способов контроля систем различного назначения является нейроуправление, базирующееся на нейронных сетях. Активное внедрение нейронных сетей в жизнь человека позволяет решить многие проблемы вычислений, т.к. они обладают следующими положительными свойствами:
Для решения задач контроля некоторых показателей системы используются нечеткие регуляторы. Такие регуляторы позволяют при помощи правил нечеткой логики контролировать работоспособность системы. Однако сейчас происходит активное внедрение нечетких нейрорегуляторов. В своей работе я реализую нейронную сеть для такого регулятора в системе контроля температуры воздуха в помещении.
Необходимо спроектировать систему контроля температуры в помещении, в которой управление происходит при помощи нечеткой нейронной сети. Регулирование объектами системы осуществляется контролером Fuzzy Controller, работающем на основе выводов правил нечеткой логики. На Рисунке 1 приведена математическая модель управления.  Рисунок 1 – Математическая модель системы управления температурой воздуха в помещении ИУ – исполнительное устройство (кондиционер) ОУ – объект управления (температура воздуха в помещении) Д – датчики температуры и анемометр Fuzzy Logic Controller – контроллер на нечеткой логике
Целевой функцией в данной системе является: минимизация невязки между поступающим вектором состояния переменных и идеальным вектором состояния переменных на основе нечетких правил
В качестве переменных вектора входных данных выбраны значения показателей:
Таким образом, вектор входных данных: 
Вектор идеальных значений показателей необходим для приведения текущего значения температуры воздуха в комнате к желаемому. Он формируется из необходимости поддержания в помещении определенной температуры, учитывая нормы СНИП 2.04.05-91*:
 Значения идеальных показателей варьируются следующим образом:
В качестве выходного параметра используется режим работы кондиционера, в зависимости от которого будет выбрана скорость подачи воздуха и его температура.
Вектор  - это рассогласование (невязка) по входу/выходу системы. Это разность между желаемыми и имеющимися параметрами. - это рассогласование (невязка) по входу/выходу системы. Это разность между желаемыми и имеющимися параметрами.
Данный вектор является выходным вектором для исполнительного устройства, а именно кондиционера, который подается на датчик температуры и анемометр.
Нечеткий регулятор Fuzzy Controller представляет из себя базу знаний – правила нечеткой логики, на основе которой выдается результат по поступающим на контроллер входным параметрам сети. Входные переменные определяются некими границами (например: высокий, средний, низкий или жарко, тепло, холодно). Каждой лингвистической переменной присваиваются численные границы. Далее составляются правила, которые заносятся в базу знаний. На основе таких правил генерируется результат. Работа Fuzzy Controller осуществляется по следующей схеме (см. Рисунок 2). 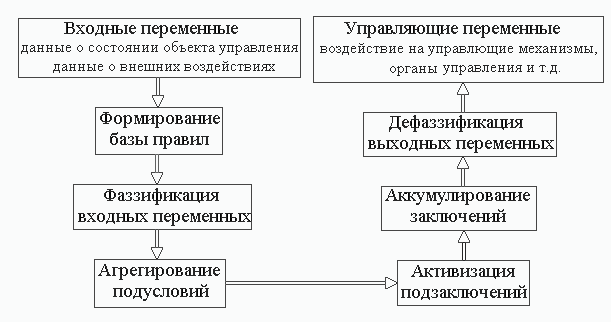 Рисунок 2 – Процесс нечеткого вывода Fuzzy Controller Алгоритм работы контроллера:
Нечеткая нейронная сеть - это искусственная нейронная сеть, которая основана на базе правил нечеткой логики. Такие сети являются универсальными аппроксиматорами за счет структуры правил ЕСЛИ-ТО. Нечеткая (гибридная) нейронная сеть обладает как преимуществами, так и недостатками. Преимущества использования такой сети:
Используемый алгоритм для определения решения – это алгоритм Сугено-Такаги (TSK), который основан на правилах вида:  Нечеткая нейронная сеть представлена следующими слоями (см. рисунок 3) 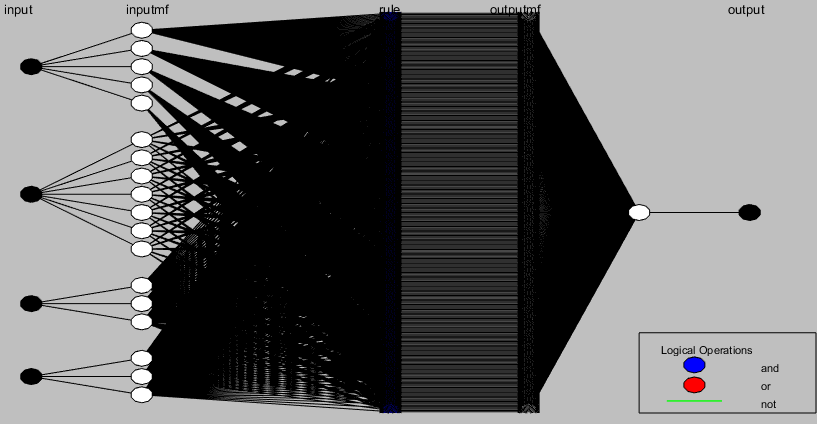 Рисунок 3 – Нечеткая нейронная сеть контроля температуры воздуха Первый слой выполняет раздельную фаззификацию каждой переменной, определяя для каждого i-го правила вывода значение коэффициента принадлежности 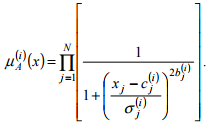 где
В качестве среды разработки и внедрения нейронной сети был выбран пакет моделирования MATLAB R2015b. Системные требования данного пакета представлены на рисунке 4. Данный пакет моделирования был вызван в связи с тем, что имеет большое количество численных методов для решения различного рода задач. Так как нейронная сеть управляет системой, включающей в себя датчики, регуляторы и устройства управления, то хорошим и наглядным средством создания такой системы является библиотека Simulink. Так же для реализации нечеткого регулятора в программе MATLAB имеется библиотека Fuzzy Logic Toolbox. Преимуществом такой системы для разработки нейронной сети является ее простота и приветливость интерфейса, большой выбор методов решения, а также наглядность графического решения задачи. 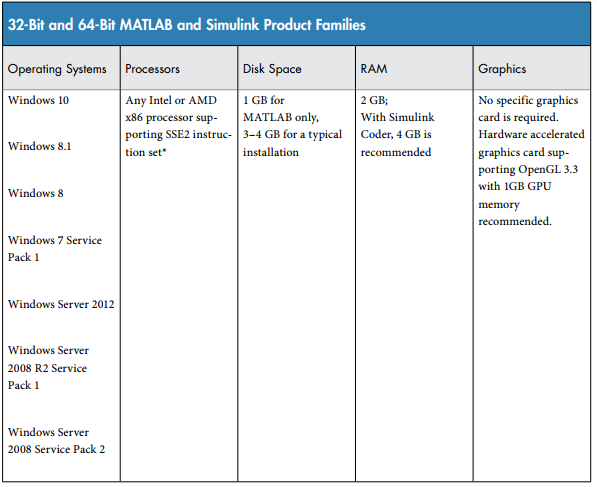 Рисунок 4 – Системные требования пакета моделирования MATLAB R2015b
Основным элементом Simulink-модели системы контроля температуры является блок Fuzzy Logic Controller with Ruleviewer. Данный блок содержит обученную нейронную сеть. Параметры и лингвистические правила нейронной сети представлены в Приложении А. На рисунке 5 представлена полная модель системы. На входе контролера стоит мультиплексор, т.к. блок контролера имеет один вход. В связи с этим на выходе контролера стоит демультиплексор, который разделяет сигнал для нагревателя от сигнала для вентилятора. 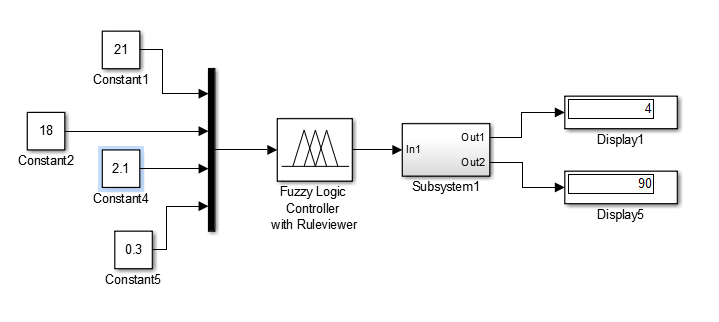 Рисунок 5 – Simulink-модель системы управления температурой воздуха в помещении
Завершающим этапом проектирования системы контроля температуры воздуха является анализ зависимостей выходных параметров от входных. Тестирование правил приведено в Приложении Б. На рисунке 6 представлено изменение режима работы кондиционера от температуры в помещении и температуры вне помещения, а на Рисунке 7 представлена зависимость в помещении. 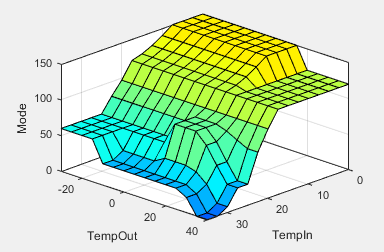 Рисунок 6 – Зависимость режима работы кондиционера от внутренней и внешней температуры 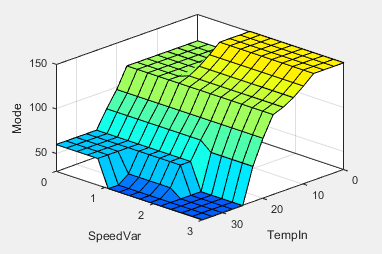 Рисунок 7 – Зависимость режима работы кондиционера от изменения температуры внутри помещения На Рисунке 8 представлены результаты обучения нечеткой нейронной сети. 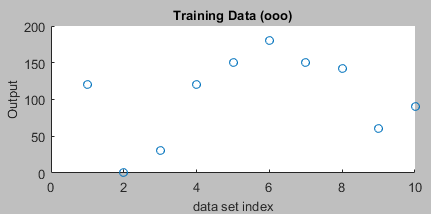 Рисунок 8 – Обучающая выборка нечеткой нейронной сети Заключение Одним из видов нейронных сетей для решения различного рода задач являются нечеткие нейронные сети. Основным классом задач решаемых такими сетями являются неформализованные задачи. Нечеткие нейронные сети основаны на составлении правил нечеткой логики. Из этого следует их недостаток – ограниченность использования. Это связано с тем, что база правил – это четкие указания зависимостей лингвистических и численных переменных, о которых нужно иметь априорное представление. В таких сетях существует четкая зависимость между входными параметрами и выходными. Однако такие нейронные сети имеют и ряд преимуществ. Они идеально подходят для «мягких» вычислений. В таких задачах области значений оперируемых переменных размыты. Например, рост человека, возраст человека, удаленность объекта, время ожидания, качество обслуживания в ресторане и т.д. Это те значения, которые имеют качественную или количественную оценку. В своей работе я использовала нечеткую нейронную сеть для контроля температуры воздуха в помещении. В качестве аппаратного средства был использован Fuzzy Controller с формированной базой знаний (правил). Преимуществом использования такой сети была возможность создания нескольких выходов для управления несколькими объектами одновременно. Это позволяет использовать единый нечеткий регулятор для наблюдения и управления несколькими устройствами одновременно. В результате проведенной работы была смоделирована система управления температурой с Fuzzy Controller и нечеткой нейронной сетью управления. В качестве результатов работы сети были приведены графическое представление правил: зависимость входов от выходов, а также график плоскости изменения режима конденсатора. Список литературы
ПРИЛОЖЕНИЕ А 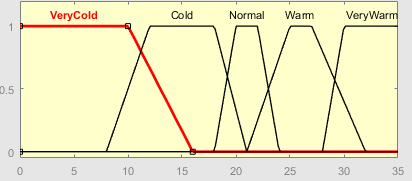 Рисунок А.1 – Функция принадлежности параметра: температура в помещении 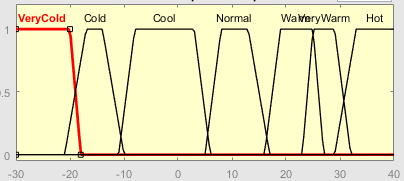 Рисунок А.2 – Функция принадлежности параметра: температура вне помещения 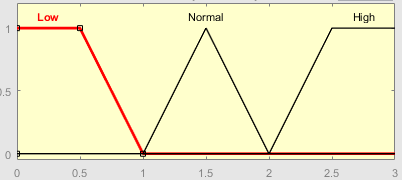 Рисунок А.3 – Функция принадлежности параметра: скорость изменения в помещении 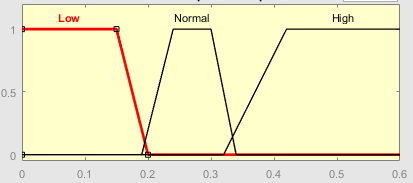 Рисунок А.4 – Функция принадлежности параметра: скорость потоков воздуха 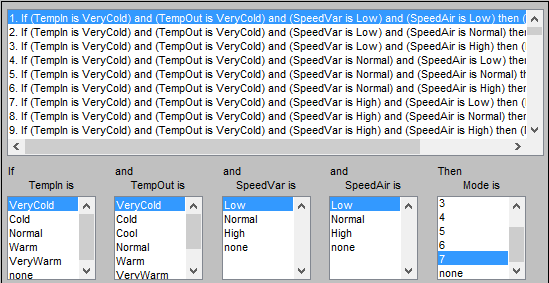 Рисунок А.5 – База лингвистических правил нейронной сети ПРИЛОЖЕНИЕ Б 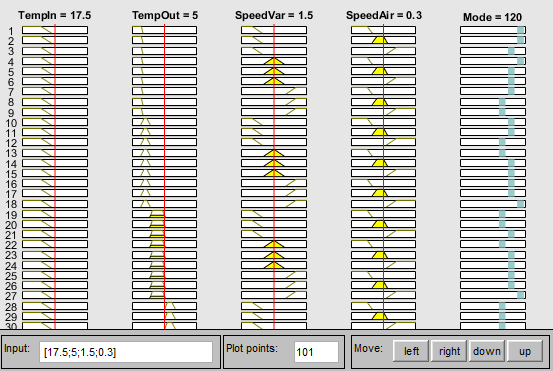 Рисунок Б.1 – Эксперимент 1 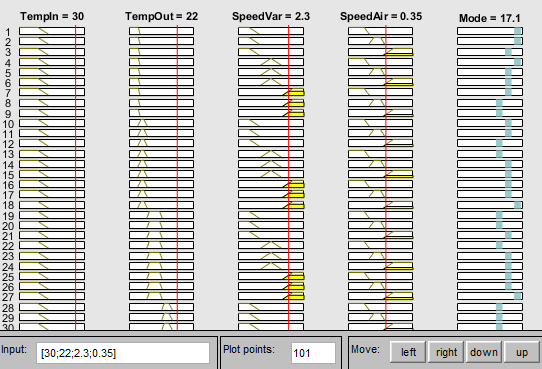 Рисунок Б.2 – Эксперимент 2 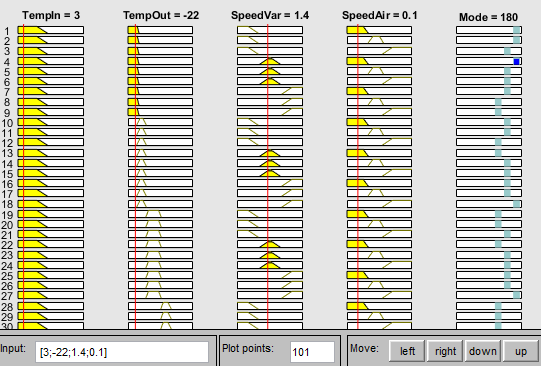 Рисунок Б.3 – Эксперимент 3 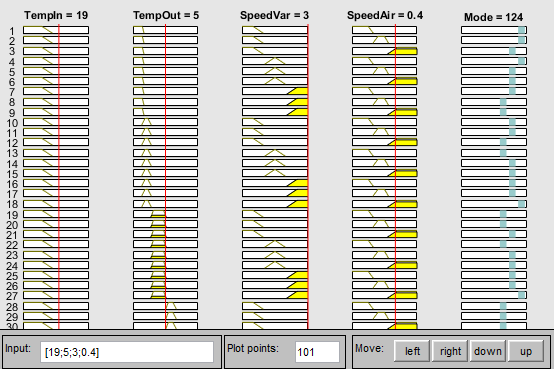 Рисунок Б.4 – Эксперимент 4 |
 – температура воздуха внутри помещения,
– температура воздуха внутри помещения,  - температура воздуха вне помещения,
- температура воздуха вне помещения, - скорость изменения температуры,
- скорость изменения температуры, - скорость потоков воздуха в комнате.
- скорость потоков воздуха в комнате.  – желаемая температура воздуха внутри помещения,
– желаемая температура воздуха внутри помещения,  – желаемая температура воздуха вне помещения,
– желаемая температура воздуха вне помещения, – желаемая скорость изменения температуры,
– желаемая скорость изменения температуры, – желаемая скорость потоков воздуха в комнате.
– желаемая скорость потоков воздуха в комнате. 
