КР ПИП САЙФ дрозд. Курсовая работа по дисциплине Первичные измерительные преобразователи и инв
 Скачать 340.76 Kb. Скачать 340.76 Kb.
|

|
Белорусский Национальный Технический Университет Приборостроительный факультет Кафедра «Информационно-измерительная техника и технологии» Курсовая работа по дисциплине «Первичные измерительные преобразователи и ИНВ» ДАТЧИК УСКОРЕНИЯ С ЕМКОСТНЫМ ПИП
Минск 2015 СОДЕРЖАНИЕ Введение 4 1 Обзор существующих методов измерения физической величины и их сравнительный анализ. 1.1 Методы измерения ускорения 5 1.2 Средства измерения ускорения 5 2 Описание принципа действия ПИП в статическом и динамическом режимах. 11 3 Описание функциональной схемы ПИП, в том числе и схемы преобразования измеряемой величины в электрический сигнал 14 3.1 Описание функциональной схемы первичного измерительного преобразователя 14 3.2 Описание схем преобразования измеряемой величины в электрический сигнал. 17 4 Анализ источников методических и инструментальных погрешностей выбранной схемы ПИП. 22 Заключение 24 Список использованной литературы 25 ВВЕДЕНИЕ В современной технике значения неэлектрических величин, параметры и характеристики неэлектрических процессов измеряют преимущественно электрическими и радиоэлектронными методами. Общий принцип работы подобных приборов предполагает преобразование неэлектрической величины в электрическую. Роль последней может выполнять параметр какого-либо компонента электрической цепи (емкость конденсатора, индуктивность катушки, сопротивление резистора) или электрическое напряжение (ток), определенный параметр которого, однозначно соответствует неэлектрической величине. При преобразовании процессов чаще всего достигается соответствие между мгновенными значениями электрического напряжения (тока) и мгновенными значениями неэлектрического процесса. Значения электрических величин и параметры напряжения (тока) измеряются с помощью радиоэлектронных или электрических средств измерений. Рассматриваемые методы обладают многими достоинствами. К ним можно отнести: возможность осуществления дистанционных измерений (в том числе на сильно удаленных объектах и объектах, недоступных для присутствия экспериментатора); ускорение измерений; возможность непрерывного измерения значений или характеристик процесса; высокую чувствительность измерительных средств; хорошие предпосылки для автоматизации измерений; упрощение обработки результатов измерений и т.п. В данной курсовой работе приводится описание прибора для измерения отклонения толщины диэлектрической ленты от образцового значения на основе емкостного измерительного преобразователя. 1 Обзор существующих методов измерения физической величины и их сравнительный анализ Ускорение − производная скорости по времени, векторная величина, показывающая, насколько изменяется вектор скорости точки (тела) при её движении за единицу времени (т.е. ускорение учитывает не только изменение величины скорости, но и её направления). Единица измерения ускорения: [м/с2].
Инерциальный метод − заключается в измерении силы, развиваемой инерционной массой при ее движении с ускорением. Метод дифференцирования скорости − заключается в дифференцировании одним из известных способов сигнала датчика скорости. Возможно дифференцирование не только электрических сигналов, но и пневматических. Например, если подать полное давление встречного потока воздуха в вариометр, то показания последнего будут функцией продольного ускорения. Метод двукратного дифференцирования расстояния до неподвижной базы − пригоден в основном для измерения вертикального ускорения и заключается в двукратном дифференцировании одним из известных способов сигнала высотомера.
Основное применение нашел инерциальный метод. Приборы и датчики, служащие для измерения ускоре ния подвижных объектов, основанные на этом принципе действия, называются акселерометрами. В зависимости от способа измерения силы акселерометры подразделяются на: - пружинные. - компенсационные. В пружинных акселерометрах сила, развиваемая инерционной массой, вызывает упругую деформацию пружины, которая создает противодействующую силу. Деформация пружины служит мерой измеряемого ускорения и при необходимости преобразуется в электрический сигнал. В компенсационных акселерометрах инерционная сила уравновешивается силой, развиваемой магнитоэлектрическим или другим преобразователем. Эта сила пропорциональна силе тока, которая и служит выходным сигналом. Структурная схема таких акселерометров содержит позиционную отрицательную обратную связь. Принцип действия средств измерений, реализующий инерциальный метод, состоит в следующем (рисунок 1.1). 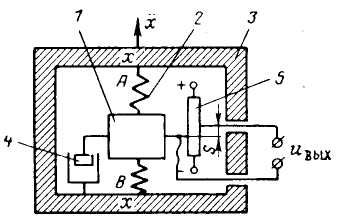 Рисунок 1.1 – Схема пружинного акселерометра (1 – масса, 2 – пружина, 3 – корпус, 4 – демпфер) Чувствительным элементом акселерометра служит инерционная масса 1, подвешенная на двух пружинах 2, прикрепленных в точках А и В к корпусу 3, жестко связанному с движущимся объектом. Линия АВ является осью чувствительности акселерометра. Она параллельна той оси движущегося объекта, по которой нужно измерить ускорение х. При отсутствии ускорений натяжение пружин одинаково и масса располагается в среднем (нейтральном) положении. Если объект движется с постоянным линейным ускорением х, то масса перемещается на некоторую величину, при которой инерционная сила Fин, возникающая вследствие ускоренного движения массы в абсолютном пространстве, уравновешивается силой Fупр упругости пружин. Для успокоения колебаний инерционной массы в переходном режиме служит демпфер 4, создающий силу, пропорциональную скорости перемещения массы относительно корпуса 3. Применяют магнитоиндукционные, жидкостные или воздушные демпферы. Требования к акселерометрам в отношении точности измерения определяются областью применения. Так, погрешности акселерометров в инерциальных системах не должны превышать 0,001%. Акселерометры, используемые в системах управления, имеют погрешности на два-три порядка выше. Погрешности акселерометров, применяемых в качестве визуальных приборов, составляют 1-3%. Основными элементами акселерометров являются подвесы инерционных масс, преобразователи сигналов, моментные (силовые) устройства, усилители сигналов и корректирующие устройства (демпферы). Для того чтобы акселерометр реагировал только на ту составляющую ускорения, для измерения которой он предназначен, его инерционная масса должна иметь специальный подвес, удовлетворяющий следующим требованиям: - минимальное трение в осях подвеса; - отсутствие перекрестных связей между измерительными осями; - обеспечение линейной зависимости между отклонениями инерционной массы и измеряемым ускорением. Подвесы на простых опорах создают значительное трение, которое снижает чувствительность акселерометра. Для уменьшения трения чувствительный элемент укрепляют на рычаге или помещают в жидкость с удельным весом, равным удельному весу чувствительного элемента, либо устанавливают его на воздушной подушке, на струнах. Применяют также электромагнитные и криогенные подвесы. В качестве преобразователей сигналов применяются емкостные, индуктивные, фотоэлектрические, струнные и др. Основные требования к ним: большая разрешающая способность, линейная зависимость выхода от входа, отсутствие реакции преобразователя на чувствительный элемент. Моментными (силовыми) устройствами для ввода сигналов обратной связи являются моментные двигатели (электродвигатели, работающие в заторможенном режиме) и электромагниты. В маятниковых акселерометрах (рисунок 1.2) чувствительный элемент 4 находится в жидкости 2, заключенной в корпусе 3. Температура жидкости поддерживается с точностью до 0,01 "С, что позволяет устранить ее конвективные движения. Сигнал с чувствительного элемента снимается преобразователем 5 и подается на усилитель У. С выхода усилителя сигнал поступает на моментный двигатель, развивающий момент, зависящий от ускорения. 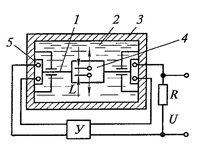 Рисунок 1.2 - Схема маятникового акселерометра (1 - подвеска; 2 - жидкость; 3 - корпус; 4 - чувствительный элемент; 5 - преобразователь; У - усилитель). В акселерометрах со струнными преобразователями 1 и 5 (рисунок 1.3) смещение массы m меняет упругие свойства струн 2 и 4. натянутых в направлении оси чувствительности. Упругий подвес 3 исключает движение массы m в поперечном направлении. Сумма частот колебаний струн 2 и 4 (f1+f2) поддерживается постоянной посредством регулирующего устройства 8, для чего она сравнивается с эталонной частотой f0, вырабатываемой генератором 6. Разность Δf = (f1+f2)-f0 используется для управления механизмом 7 натяжения струн. При поддержании значения (f1+f2) постоянным получается линейная зависимость между измеряемым ускорением ах и разностью частот Δf. Струнные акселерометры находят применение в инерциальных системах управления. 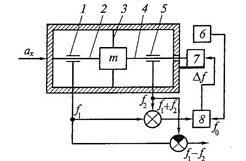 Рисунок 1.3 - Схема струнного акселерометра (7 и 5 - струнный преобразователь; 2 и 4 - струна; 3 - упругий подвес; 6 - генератор; 7 - механизм натяжения струн; 8 - регулирующее устройство). Акселерометр с волоконно-оптическим измерительным преобразователем основан на эффекте фотоупругости. Некоторые материалы (эпоксидная смола, нитрат лития и др.) меняют свои оптические свойства при их деформировании. На этой основе создан целый ряд средств измерения, в которых сила преобразуется в деформацию. На рисунке 1.4 источник света 1 (например, полупроводниковый лазер), проходя через линзу 3 и поляризатор 4, поступает на стержень из фотоупругого материала 5, изменяющий свое напряженное состояние в зависимости от ускорения груза акселерометра 2. Преобразуя полученный сигнал с помощью четвертьволновой пластины 6, анализатора 7 и линзы 8, он поступает по волоконному светопроводу 9 на приемник излучения (фотодиод) 10. В результате определяется величина ускорения с достаточно высокой точностью. 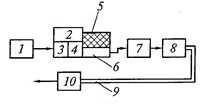 Рисунок 1.4 - Схема акселерометра с волоконно-оптическим преобразователем (1 - источник света; 2 - акселерометр; 3 и 8 - линза; 4 - поляризатор; 5 - фотоупрутий материал; 6 - четвертьволновая пластина; 7 - анализатор; 9 - волоконный светопровод; 10 - приемник излучения - фотодиод). Измерение угловых ускорений возможно аналогичными методами. При инерциальном методе измерения инерционная масса подвешивается на оси с одной степенью свободы, проходящей через центр тяжести этой массы. Измеряется момент инерционных сил, развиваемый массой при ее вращении с угловым ускорением. Применимы те же два способа измерения инерционных сил, что и в линейных акселерометрах, — пружинный и компенсационный. При определении угловых ускорений методом дифференцирования производится дифференцирование сигнала гироскопического датчика угловых скоростей. Для определения угловых ускорений методом двукратного дифференцирования используется сигнал гироскопического датчика угла. [1,2] 2 Описание принципа действия ПИП в статическом и динамическом режимах. Ни одна система управления не может работать без информации о состоянии объекта управления и его реакции на управляющее воздействие. Элементом систем, обеспечивающим получение такой информации, является измерительный преобразователь. Принцип действия параметрических преобразователей заключается в преобразовании неэлектрических входных величин в параметры электрических цепей: сопротивление R, индуктивность L, емкость С. Для питания этих преобразователей требуются внешние источники. К таким датчикам относятся: резистивные, индуктивные, трансформаторные, емкостные преобразователи. Емкостный преобразова тель представляет собой конденсатор, электрические параметры которо го изменяются под действием входной величины. Конденсатор состоит из двух электродов, к которым подсоединены выводные концы. Пространство между электродами заполнено диэлект риком. При изменении взаимного положения электродов или при из менении диэлектрической проницаемости среды, заполняющей меж электродное пространство, изменяется емкость конденсатора. В качестве емкостного преобразователя широко используется плос кий конденсатор. Его емкость определяется выражением  (2.1) (2.1)где – относительная диэлектрическая проницаемость диэлектрика; 0 – диэлектрическая проницаемость вакуума; S – площадь пластины; – толщина диэлектрика или расстояния между пластинами. Из приведенного соотношения видно, что на емкость конденсатора можно влиять изменением площади перекрытия пластин S (рисунок 2.1, а), расстояния между ними (рисунок 2.1, б), диэлектрическая проницаемость вещества , находящегося в зазоре между обкладками конденсатора (рисунок 2.1, в).
Рисунок 2.1 – Схемы и характеристики емкостных датчиков с различными изменяемыми параметрами: а – площади перекрытия пластин; б – расстояния между пластинами; в – диэлектрической проницаемости вещества в зазоре. При измерении линейного перемещения в качестве изменяемого параметра конденсатора можно выбрать величину δ (рисунок 2.1, б), тогда статическая характеристика измерительного преобразователя будет нелинейной. В связи с этим такие датчики следует применять в тех случаях, когда диапазон изменения контролируемой величины соответствует сравнительно небольшому участку характеристики, на котором ее можно считать линейной. Как правило, величина перемещения не должны превышать 1 мм. При измерении сравнительно больших линейных перемещений целесообразно использовать в качестве изменяемого параметра конденсатора площадь перекрытия пластин (рисунок 2.1, а). Выбор того или иного параметра конденсатора в качестве изменяемого зависит от характера измеряемой величины. Так при измерении угловых механических перемещений наиболее удобно использовать в качестве изменяемого параметра площадь перекрытия пластин (рисунок 2.2). Статическая характеристика такого емкостного датчика будет линейной. 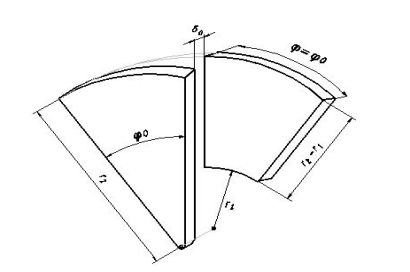 Рисунок – 2.2 – Емкостной датчик для измерения угловых величин. Следует отметить, что рассмотренные емкостные датчики не обладают свойством реверсивности. [3,4,5] Другой не менее важной характеристикой емкостного датчика или преобразователя является динамическая характеристика. Динамической характеристикой емкостного датчика называется зависимость изменения выходной величины от скорости изменения входной величины. Динамическая характеристика может быть представлена в виде кривой переходного процесса, т.е. зависимостью С=  ( ( ) при скачкообразных изменениях входной величины, или амплитудно-фазовой характеристикой, т.е. зависимостью амплитуды (U или I) и фазы ( ) при скачкообразных изменениях входной величины, или амплитудно-фазовой характеристикой, т.е. зависимостью амплитуды (U или I) и фазы ( ) выходного сигнала от частоты изменения входной величины. ) выходного сигнала от частоты изменения входной величины.Наиболее трудной для анализа является динамическая характеристика емкостного датчика с нелинейной статической характеристикой в этом случае динамические свойства датчика должны рассматриваться с введением линеаризации. [3] На основе подобных емкостных преобразователей могут быть созданы датчики силы, ускорения и давления с первичным преобразованием этих величин в малое перемещение. [4] 3 Описание функциональной схемы ПИП, в том числе и схемы преобразования измеряемой величины в электрический сигнал 3.1 Описание функциональной схемы первичного измерительного преобразователя. Измерительный прибор осуществляет преобразование входного сигнала x(t) в выходной сигнал y(t): (t) = F[x(t)], (3.1) где x(t) и y(t) - векторные величины; F(x) - требуемая функция преобразования. На выражение (3.1) можно смотреть на информационную модель прибора, в которой осуществляется преобразование входной информации в выходную. В более общей формулировке прибор осуществляет операцию отображения множества сигналов на входе xX в множество сигналов на выходе yY, при этом указанное отображение должно быть однозначным. В реальных приборах функция преобразования зависит не только от сигнала x(t), но также от возмущения (t) на сигнал x(t), от помехи (t), действующей на параметры прибора q(t), от несовершенства технологий изготовления прибора (t) и от помехи (t), возникающих в самом приборе (трения, паразитных ЭДС и др.), т. е. (t) = F[x,,q(,),)], (3.2) где ,q,,, - векторы. На рисунке 3.1 приведена функциональная схема, отображающая зависимость (3.2). Измеряемыми величинами, на основе которых формирует полезный сигнал х(t), являются параметры первичной информации, такие, как давление, температура, количество и расход жидкостей, линейные и угловые размеры, расстояния, скорости, ускорения, деформации, напряжения, вибрации, и др. К числу вредных возмущений относятся перегрузки, вибрации, электрические и магнитные поля, неконтролируемые вариации температуры, давления, влажности окружающей среды и т. д. Все эти возмущения вносят погрешности в показания приборов.  Рисунок 3.1 - Функциональная схема прибора. Прибор должен воспроизводить измеряемые величины с допускаемыми погрешностями. Получать на выходе прибора величины, пропорциональные входным величинам; формировать заданные функций от входных величин (квадратичная и логарифмическая шкалы и др.); получать производные и интегралы от входных величин; формировать на выходе слуховые или зрительные образы, отображать свойства входной информации; формировать управляющие сигналы, используемые для управления контроля; запоминать и регистрировать выходные сигналы. Измерительный сигнал, получаемый от контролируемого объекта, передается в измерительный прибор в виде импульса какого - либо вида энергии. Можно говорить о сигналах: первичных - непосредственно характеризующих контролируемый процесс; воспринимаемых чувствительным элементом прибора; подаваемых в мерительную схему, и т.д. При передаче информации от контролируемого объекта к указателю прибора сигналы претерпевают ряд изменений по уровню и спектру и преобразуются из одного вида энергии в другой. Необходимость такого преобразования вызывается тем, что первичные сигналы не всегда удобны для передачи, переработки, дальнейшего преобразования и воспроизведения. Например, при измерении температуры прибором, чувствительный элемент которого помещается в контролируемую среду, воспринимаемый поток тепла трудно передать, а тем более воспроизвести на указателе прибора. Этой особенностью обладают почти все сигналы первичной информации. Поэтому воспринимаемые чувствительными элементами сигналы почти всегда преобразуются в электрические сигналы, являющиеся универсальными. Та часть прибора, в которой первичный сигнал преобразуется, например, в электрический, называется первичным преобразователем. Часто этот преобразователь совмещается с чувствительным элементом. Сигналы с выхода первичного преобразователя поступают на следующие преобразователи измерительного прибора.  Рисунок 3.2 - Структурная схема прибора На рисунке 3.2 дана структурная схема прибора, на которой указаны: исследуемый объект (ИО); первичный преобразователь (ПП); устройство сравнения (УС); устройство обработки сигналов (Обр. 1), в котором производится усиление, коррекция погрешностей, фильтрация и др.; кодирующее устройство (Код); модулятор (М); канал передачи (КП); устройство детектирования (Д); устройство декодирования (ДК); устройство обработки информации (Oбр. 2), обеспечивающее функциональное преобразование, коррекции погрешностей, формирование функции преобразования (1) и др.; преобразователь (Пр), выдающий информацию на систему отображения (СОИ) и на обратный преобразователь (ОП), с которого поступают сигналы на устройство сравнения. [2] 3.2 Описание схем преобразования измеряемой величины в электрический сигнал. Простейший ёмкостной измерительный преобразователь содержит два электрода площадью S, параллельно расположенных на расстоянии δ в среде с диэлектрической проницаемостью ε. С электрической стороны преобразователь характеризуется напряжением U между пластинами, зарядом q=CU, где C – емкость, равная при плоскопараллельном расположении пластин  (без учета краевого эффекта), током (без учета краевого эффекта), током  , энергией электрического поля , энергией электрического поля . . Чаще всего выходной величиной емкостного измерительного преобразователя является изменение емкости, связанное с механическим перемещением, изменяющим зазор или площадь, или изменением диэлектрической проницаемости ε под действием изменения температуры или состава диэлектрика. Емкостные преобразователи работают на переменном токе несущей частоты ω, которая должна значительно превышать наибольшую частоту Ω изменения емкости под действием измеряемой величины. Полная схема емкостного преобразователя представлена на рисунке 3.3 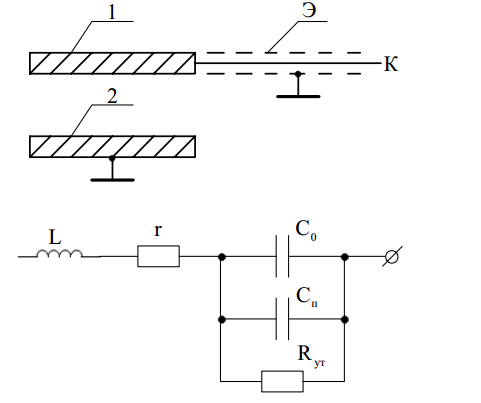 Рисунок 3.3 – Эквивалентная схема емкостного измерительного преобразователя В эквивалентной схеме учитывается емкость C0 между электродами 1 и 2, сопротивление Rут изоляции между электродами, сопротивление r и индуктивность L кабеля, а также паразитная емкость Cп между электродами и заземленными деталями конструкции и между жилой кабеля К и его заземленным электродом Э. Влияние отдельных элементов схемы учитывается в зависимости от конкретных обстоятельств. Так, при работе на низкой частоте сопротивление конденсатора велико и влияние индуктивности и сопротивление ввода не сказывается. При работе на высоких частотах сопротивление конденсатора падает и большую роль начинает играть индуктивность и сопротивление ввода, в то время как шунтирующее действие сопротивления утечки перестает сказываться. Емкость большинства преобразователей составляет 10 – 100 пФ, и поэтому даже при относительно высоких частотах напряжения питания (105 – 107 Гц) их выходные сопротивления велики и равны. Для работы с емкостными преобразователями применяют измерительные цепи, в основу которых положены различные структуры: делители напряжения, измерительные мосты, емкостно-диодные цепи, резонансные контуры. Очень часто в состав измерительных цепей включают также операционные усилители (ОУ). На рис 3.4 показана схема цепи с ОУ, построенная по принципу делителя напряжения. 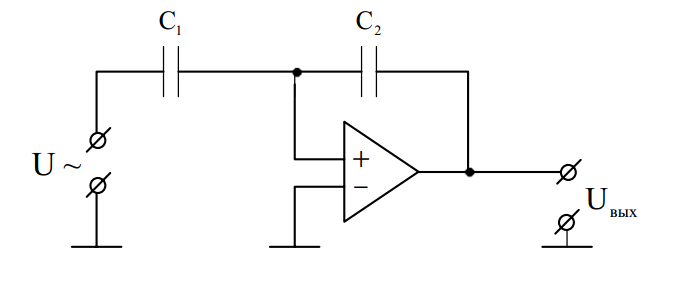 Рисунок 3.4 - Измерительная схема для емкостного преобразователя с ОУ В этом случае  ; (3.3) ; (3.3)Как видим, с помощью такой цепи удобно преобразовывать в напряжение изменение зазора между обкладками конденсатора C2 или изменение площади конденсатора C1. В обоих случаях зависимость выходного напряжения от измеряемой величины будет линейной. Дифференциальные емкостные преобразователи включаются преимущественно в мостовые измерительные цепи. На рисунке 3.5 приведен пример цепи, содержащей мост с индуктивно-связанными плечами. В этой схеме выходной сигнал моста подсоединен к инвертирующему входу ОУ. 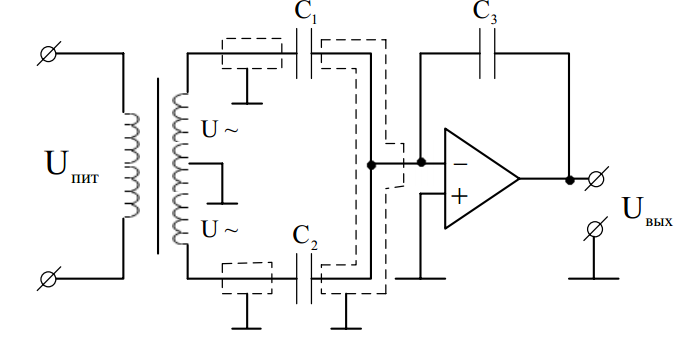 Рисунок 3.5 - Мостовая измерительная схема для дифференциального емкостного преобразователя Поскольку потенциал на инвертирующем входе усилителя весьма близок к нулю, то ток между проводом, подсоединенным к этому входу, и окружающим его экраном будет практически равен нулю. Для данной цепи верно соотношение  ; (3.3) ; (3.3)Выше приведена схема, в которой пластины емкостного преобразователя изолированы от корпуса, что иногда бывает трудно реализовать конструктивно. При заземлении одной из пластин, желательно элементы измерительной цепи располагать в одном корпусе с датчиком. На рисунке 3.6 представлена емкостно-диодная измерительная цепь дифференциального датчика с заземленной пластиной. 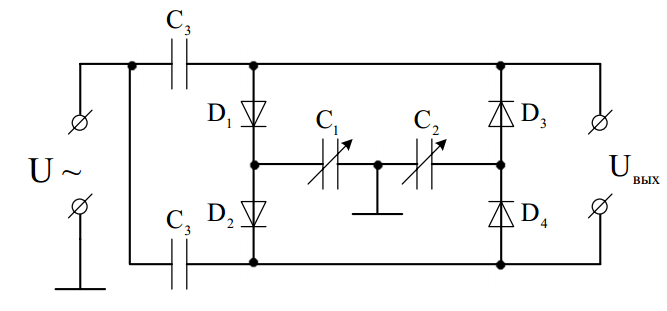 Рисунок 3.6 - Диодно-емкостная измерительная схема Емкости датчика С1 и С2 подсоединены к источнику переменного напряжения с помощью четырех диодов и двух дополнительных конденсаторов С3. В каждом полупериоде переменного напряжения открывается соответствующая пара диодов (D1,D4 или D2,D3). При этом каждый из конденсаторов С3 соединяется последовательно то с емкостью С1, то с емкостью С2. При неравенстве емкостей С1 и С2 токи через конденсаторы С3, текущее в положительном и в отрицательном направлении, будут не равны между собой. Вследствие этого на конденсаторах С3 появляется постоянное напряжение, которое и является выходным. Если пренебречь падениями напряжения на диодах, то значение Uвых определится приближенным соотношением.  (3.4) (3.4)Цепи с резонансными контурами (рисунок 3.7,а). Цепи питаются от источников со стабильной частотой ω0. 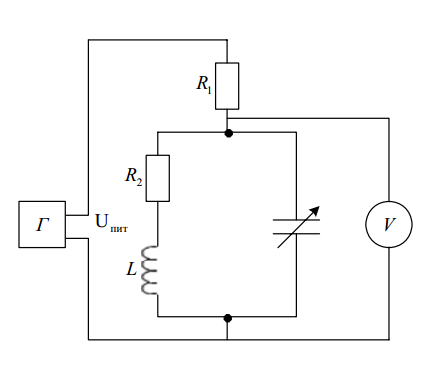 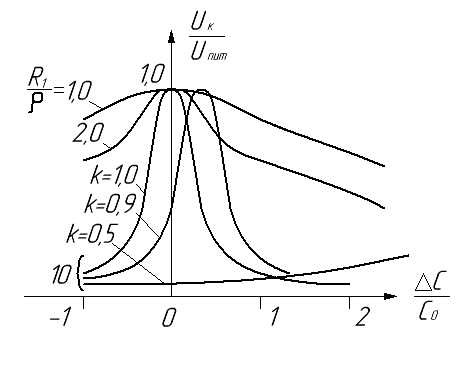 а) б) Рисунок 3.7 - Резонансно-измерительная схема При изменении емкости С преобразователя, сопротивление контура изменяется по резонансной кривой и при ω0  достигает максимума. На склонах резонансной кривой может быть выбран участок, более или менее приближающийся к линейному. Пренебрегая сопротивлением R2 по сравнению с сопротивлениями ω0L и R1 и полагая достигает максимума. На склонах резонансной кривой может быть выбран участок, более или менее приближающийся к линейному. Пренебрегая сопротивлением R2 по сравнению с сопротивлениями ω0L и R1 и полагая , ,  , ,  , ,  (3.5) (3.5)напряжение на контуре можно выразить соотношением  (3.6) (3.6)Зависимости Uк / Uпит представлены на рисунке 3.7, б. [7] 4 Анализ источников методических и инструментальных погрешностей выбранной схемы ПИП. При измерениях различных неэлектрических величин емкостными датчиками могут возникнуть погрешности, вызванные влиянием температуры и влажности. Под влиянием температуры могут изменяться геометрические размеры датчика, а также диэлектрическая проницаемость (в датчиках с твердым и жидким диэлектриком). Эти погрешности могут быть сведены к минимуму путем выбора соответствующей конструкции датчика (правильный выбор геометрических размеров деталей с учетом их температурных коэффициентов расширения). В значительной степени температурная погрешность снижается при применении дифференциальных измерительных схем. Сильное влияние на точность преобразования оказывают паразитные емкости и посторонние электрические поля, ввиду чего емкостные датчики необходимо очень тщательно экранировать. Первым усовершенствованием, существенно повышающим метрологические характеристики датчика, является введение экранных электродов. Экраны обеспечивают значительную локализацию поля, создаваемого рабочими электродами преобразователя, и в результате существенно повышают его относительную чувствительность. Кроме того положительным эффектом экранов является резкое снижение электромагнитных наводок и, в ряде случаев, увеличения рабочей емкости, так как является частью высокопотенциального электрода. Дальнейшее улучшение метрологических характеристик достигается путем установки охранных электродов, с помощью которых исключается влияние краевых полей у торцов преобразователя. Кроме того, сам контролируемый проводник иногда является рабочим электродом преобразователя. Установление соответствующих потенциалов на электродах и контролируемом проводнике позволяет создать плоскопараллельное поле в рабочей зоне преобразователя, что улучшает его метрологические характеристики. Еще одна из причин возникновения погрешностей при использовании данного типа датчиков состоит в том, что на промышленной частоте мощность датчика очень мала, поэтому для обнаружения изменения емкости необходимо использовать достаточно чувствительную аппаратуру, а его сопротивление велико, из-за чего могут возникнуть большие погрешности, обусловленные паразитными утечками. Поэтому необходимо применять источники питания высокой частоты (от 1 кГц до десятков мегагерц).[6] заключение В данной работе были рассмотрены датчики ускорения с емкостными преобразователями. Произведен обзор существующих методов и средств измерения ускорения. Описаны принцип действия емкостных преобразователей, схемы преобразования измеряемой величины в электрический сигнал. Также был проведен анализ инструментальных и методических погрешностей емкостных преобразователей. Список использованной литературы 1 Конспект лекций: методы и средства измерения ускорения. URL: http://www.hobbycnc.ru/docs/axeliall.pdf (дата обращения: 20.03.2014) 2 Боднер, В. А. Измерительные приборы/ В. А. Боднер, А. В. Алферов.-Москва: Изд-во стандартов, 1986. - 616 с. Т. 1. Теория измерительных приборов. Измерительные преобразователи. - 1986. - 392 с. Т. 2. Методы измерений, устройство и проектирование приборов. - 1986. - 224 с. 3 Бухгольтц В.П., Тисевич Э.Г. Емкостные преобразователи в системах автоматического контроля и управления., М., «Энергия», 1972. – 80 с. 4 Левшина Е.С., Новицкий П.В. Электрические измерения физических величин: учебное пособие. – Л.: Энергоатомиздат, 1983. -320 с. 5 Мазин В.Д. Метрология и теплотехнические измерения: учебное пособие. СПб.: Изд-во Политехнического университета, 2010. -124 с. 6 Конспект лекций: принцип действия емкостных преобразователей. URL: http://allsummary.ru/249-princip-deystviya-emkostnyh-pip.html (дата обращения: 02.04.2014) 7 Дадаян Ю.А. Методические указания для студентов специальности «Информационно-измерительная техника и технологии». – М.: РГУ нефти и газа им. И.М. Губкина, 2005 г. Для преобразования изменений емкости в соответствующие изменения тока, напряжения или частоты применяются различные электрические схемы: резонансные, мостовые и другие. При включении емкостных преобразователей в мостовые схемы необходимо: - большое сопротивление в выходной диагонали моста; - экранирование всех подводящих проводов; - отсутствие элементов шунтирующих рабочие емкости. Питание измерительных схем емкостных преобразователей осуществляется обычно переменным током повышенной частоты – от нескольких килогерц до десятков мегагерц. При низких частотах реактивное сопротивление преобразователя весьма велико, так как емкость не превышает несколько сот пикофарад. При проектировании емкостных преобразователей следует иметь в виду, что зависимость емкости С от расстояния между пластинами δ имеет гиперболический характер, в то время как сопротивление XC зависит линейно от расстояния δ. При включении емкостных дифференциальных преобразователей в мост напряжение на его выходе определяется по упрощенной формуле: Как видно из этой формулы, нелинейность характеристики U=f(δ) определяется отношением входного сопротивления указателя к выходному сопротивлению моста. Основными достоинствами емкостных преобразователей является большая чувствительность, относительно малые размеры и вес, а также очень малое обратное действие на контролируемый параметр. К числу недостатков следует отнести: - сильное влияние на точность преобразования паразитных емкостей и посторонних электрических полей, ввиду чего емкостные датчики необходимо очень тщательно экранировать; - необходимость применения источников питания высокой частоты, так как на промышленной частоте мощность датчика очень мала, поэтому для обнаружения изменения емкости необходимо использовать достаточно чувствительную аппаратуру, а его сопротивление велико, из-за чего могут возникнуть большие погрешности, обусловленные паразитными утечками; - влияние температуры на геометрические размеры и диэлектрическую проницаемость (в датчиках с твердым и жидким диэлектриком). Первым усовершенствованием, существенно повышающим метрологические характеристики ПИП, является введение экранных электродов. Экраны обеспечивают значительную локализацию поля, создаваемого рабочими электродами преобразователя, и в результате существенно повышают его относительную чувствительность. Кроме того положительным эффектом экранов является резкое снижение электромагнитных наводок и, в ряде случаев, увеличения рабочей емкости, так как является частью высокопотенциального электрода. Дальнейшее улучшение метрологических характеристик емкостных ПИП достигается путем установки охранных электродов, с помощью которых исключается влияние краевых полей у торцов преобразователя. Кроме того, сам контролируемый проводник иногда является рабочим электродом ПИП. Установление соответствующих потенциалов на электродах и контролируемом проводнике позволяет создать плоскопараллельное поле в рабочей зоне преобразователя, что улучшает его метрологические характеристики. Емкостные датчики можно разделить на две основные группы - датчики параметрические (недифференциальные) и датчики дифференциальные. В схемах с параметрическими датчиками происходит преобразование входной неэлектрической величины (угла поворота оси ротора датчика) в электрическую выходную величину (частоту, ток, напряжение), функционально за висящую от входной величины. В схемах с дифференциальными датчиками, включенными в следящие системы, с датчика снимается лишь сигнал рассогласования, который становится равным нулю в установившемся состоянии следящей системы. Примером параметрического емкостного датчика может служить переменная емкость, включенная в контур лампового генератора (рисунок 3.4). Здесь при измене нии угла поворота оси ротора изменяется емкость датчика и меняется частота генератора, являющаяся выходной величиной. 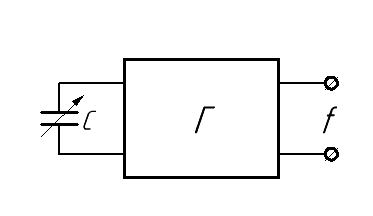 Рисунок 3.4 - Емкостной датчик, включенный в контур с генератором 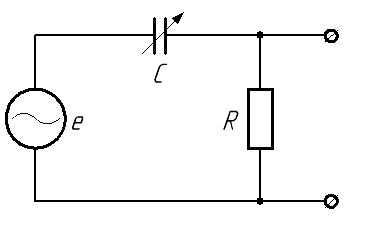 Рисунок 3.5 - Емкостной датчик, включенный в цепь переменного тока На рисунке 3.5 приведен другой пример использования параметрического датчика. В этом случае с изменением значения емкости С меняется ток через нее, а следовательно, и напряжение на выходе системы, падающее на сопротивле нии нагрузки R  , которое и является выходной величиной. , которое и является выходной величиной. Подобные системы являются разомкнутыми системами регулирования. Основным недостатком этих схем являет ся зависимость значения выходной величины от параме тров источника питания датчика, усилителя и других эле ментов схемы, а также от внешних условий. Стоит измениться напряжению или частоте генератора, пи тающего датчик (рисунок 3.5), как напряжение, частота и фаза, являющиеся выходными величинами и снимаемые с сопро тивления R, также изменятся. От этих недостатков свободны схемы с дифференциаль ными емкостными датчиками, включенными в замкнутую систему автоматического регулирования. В этих схемах выходной величиной является угол поворота оси отраба тывающего двигателя или другой оси, связанной с нею че рез редуктор. Одной из основных характеристик такой системы является чувствительность, показывающая, при каком минимальном отклонении чувствительного элемента система отработки приходит в действие. Внешние факторы - напряжение питания, температура окружающей сре ды и т. п. - влияют лишь на чувствительность системы; на точность системы они могут влиять лишь в той мерь, в какой она связана с чувствительностью. Это значит, что схемы с емкостными дифференциальными датчиками, так же как и любые мостовые нулевые схе мы с линейными относительно частоты и напряжения сопротивлениями в плечах, предъявляют значительно меньшие требования к стабильности источника питания. |





