Плащанский основы электроснабжения. Курсовой проект 5 Расчётная часть 6 Тахограмма, рабочей машины 6
 Скачать 1.95 Mb. Скачать 1.95 Mb.
|

Требования к проектируемому электроприводуНеобходимый диапазон регулирования скорости вращения рабочей машины ( Плавный пуск, торможение и реверс рабочей машины. Заданное (достаточное) быстродействие машины (длительность переходных процессов не должно превышать 2-3% от времени цикла). Минимум потерь энергии в переходных процессах. Возможность изменения направления вращения механизма. Режим рекуперативного торможения. Перегрузочная способность двигателя 2,5 Средняя температура нагрева изоляции не должна превышать 115О С. Статическая ошибка по скорости не должна превышать Расчетная часть 1. Тахограмма рабочей машины 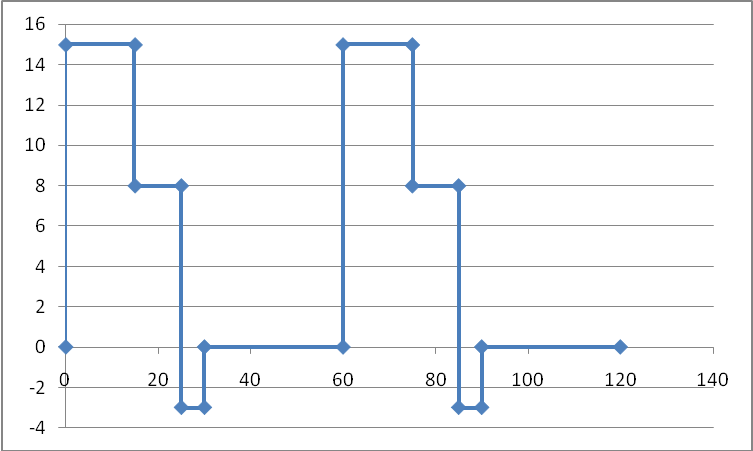 Рисунок 1 Тахограмма рабочей машины Рассчитаем ПВ в %:  , ,где 2. Для примера Механическая характеристика 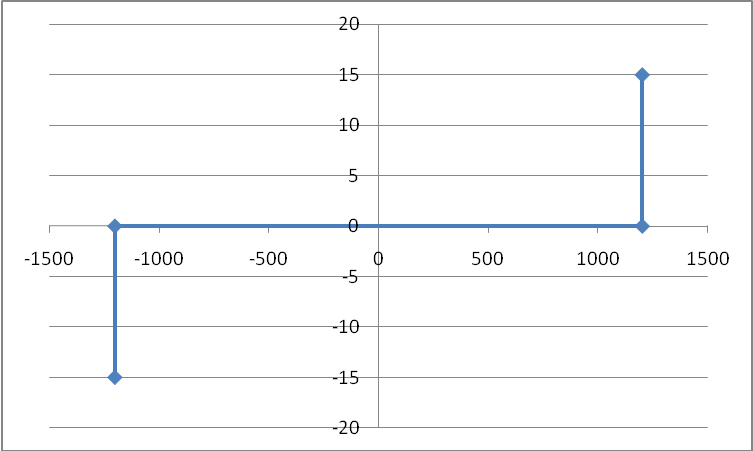 Рисунок 2 Механическая характеристика рабочей машины 2. Механическая характеристика Мсм =500 + 10ω. Она показана на рисунке. 2.  Рисунок 2 Механическая характеристика рабочей машины 3. Нагрузочную диаграмму Нагрузочная диаграмма показана на рисунке 3.  Рисунок 3 Нагрузочная диаграмма рабочей машины 4. Предварительный выбор двигателя по мощности. Предварительно мощность двигателя определяем по тахограмме и нагрузочной диаграмме рабочей машины (рис. 1 и 3): где Принимаем Определяем номинальный момент механизма где MM.CP - средний момент механизма; MM.CP К - среднеквадратичный момент механизма.   MСМiрассчитанные в п. 3, Определяем предварительно мощность двигателя Пересчитаем найденную расчётную мощность на допустимую для двигателей серии МТКН, ПВ%=40% Выбор двигателя и редуктора. Выбираем двигатели серии 4АС и МТКН из условия: Наиболее подходящие по мощности двигатель 4АС200. Технические данные двигателя 4АС200: Номинальная мощность Рнд, кВт, 31,5 Номинальное напряжениеUнд, В 380 Синхронная скорость вращения ω0, с-1 157 Коэффициент мощности cosφ 0,92 КПД н 0,875 Перегрузочная способность по моменту λм 2,2 Номинальное скольжение Sн, % 5,7 Параметры схемы замещения: х, о.е.4,5 r1, о.е. 0,034 х1, о.е. 0,075 Момент инерции ротора JД, кгм2 0,37 Технические данные двигателя МТКН 512-8: Номинальная мощность Рнд, кВт, 37 Номинальное напряжениеUнд, В 380 Номинальная скорость ωн, с-1 72,8 Коэффициент мощности cosφ, % 78 КПД н, % 83 Перегрузочная способность по моменту λм 2,5 Номинальный ток статора I1н, А 87 Ток статора холостого хода Iхх, А 45 Активное сопротивление обмотки статора R1, Ом 0,1 Индуктивное сопротивление обмотки статора Х1, Ом 0,17 Номинальный ток ротора I`2н, А 69 Активное сопротивление обмотки ротора Индуктивное сопротивление обмотки ротора X`2, Ом 0,37 Момент инерции ротора JД, кгм2 1,425 * Сопротивления обмоток даны в нагретом состоянии, ωмакс = 2,5ω0 5.1 Рассчитаем передаточное число редуктора для двигателя МТКН 512-8  . .Принимаем передаточное число редуктора (меньшим расчётного или близким к расчётному значению, чтобы применить однозонное регулирование), т.е. – 2,5. Из рекомендованных типов редукторов выбираем редуктор ЦОН-20. Рассчитаем мощность редуктора: где Принимаем мощность редуктора ЦОН-20 Рнр = 78,8 кВт при синхронной скорости вращения быстроходного вала 1000 об/мин. Рассчитаем передаточное число редуктора для двигателя 4АС200:  . .где Принимаем передаточное число редуктора – 5,0. Из рекомендованных типов редуктора выбираем редуктор ЦОН-20. Рассчитаем мощность редуктора: где Принимаем мощность редуктора Рнр = 56,7 кВт. При заданной мощности и синхронной скорости вращения быстроходного вала 1500 об/мин выбираем редуктор ЦОН-20. Все имеющиеся технические данные и расчетные величины сведены в табл. 1. Таблица 1. Выбор двигателя по оптимальной скорости и передаточному отношению
По минимальному значению произведения JД·i2 из двух вариантов останавливаемся на двигателе МТКН 512-8 и редукторе ЦОН-20. Рассчитаем основную рабочую скорость механизма для двигателя МТКН 512-8 и редуктора ЦОН-20: Рассчитаем момент инерции электропривода, приведённый к валу двигателя где δ = 1,2 - коэффициент, учитывающий момент инерции вращающихся частей редуктора и полумуфт; Jд = 1,425 кгм2 - момент инерции двигателя МТКН 512-8; Jм = 3,0·Jд, кгм2 - момент инерции рабочей машины. Проверка двигателя на перегрузочную способность В течение циклов возможны случайные кратковременные перегрузки, превышающие максимальный статический момент в 2,5 раза. Фактическая перегрузка двигателя по моментам:  Условие устойчивости двигателя к перегрузке Выбор преобразователя частоты для питания асинхронного двигателя с короткозамкнутым ротором. Для выбранного двигателя МТКН 512-8 и на основании нагрузочной диаграммы рабочей машины выбран реверсивный преобразователь частоты серии Триол АТ05 (асинхронный транзисторный интеллектуальный электропривод). Электроприводы Триол АТ05 высокодинамичные, реализующие 4х квадрантное управление АД с рекуперацией энергии в сеть. Технические данные: Напряжение питающей сети, В 3х380 Выходное напряжение, В 3х(0 ÷ 380) Выходная частота, Гц 0÷400 КПД н, % 95 Коэффициент мощности cosφ, % 95 Мощность ПЧ, кВт 50 Мощность двигателя, кВт 37 Выходной ток, А 75 Расчет и построение тахограммы ωi = f(t) работы двигателя ωС = ωМ · iр ωС1 = ωМ1 · iр = 22 · 2,5 = 55 с-1; ωС2 = ωМ2 · iр = 29 · 2,5= 72,5 с-1; ωС3 = ωМ3 · iр = -5 · 2,5 = -12,5 с-1. 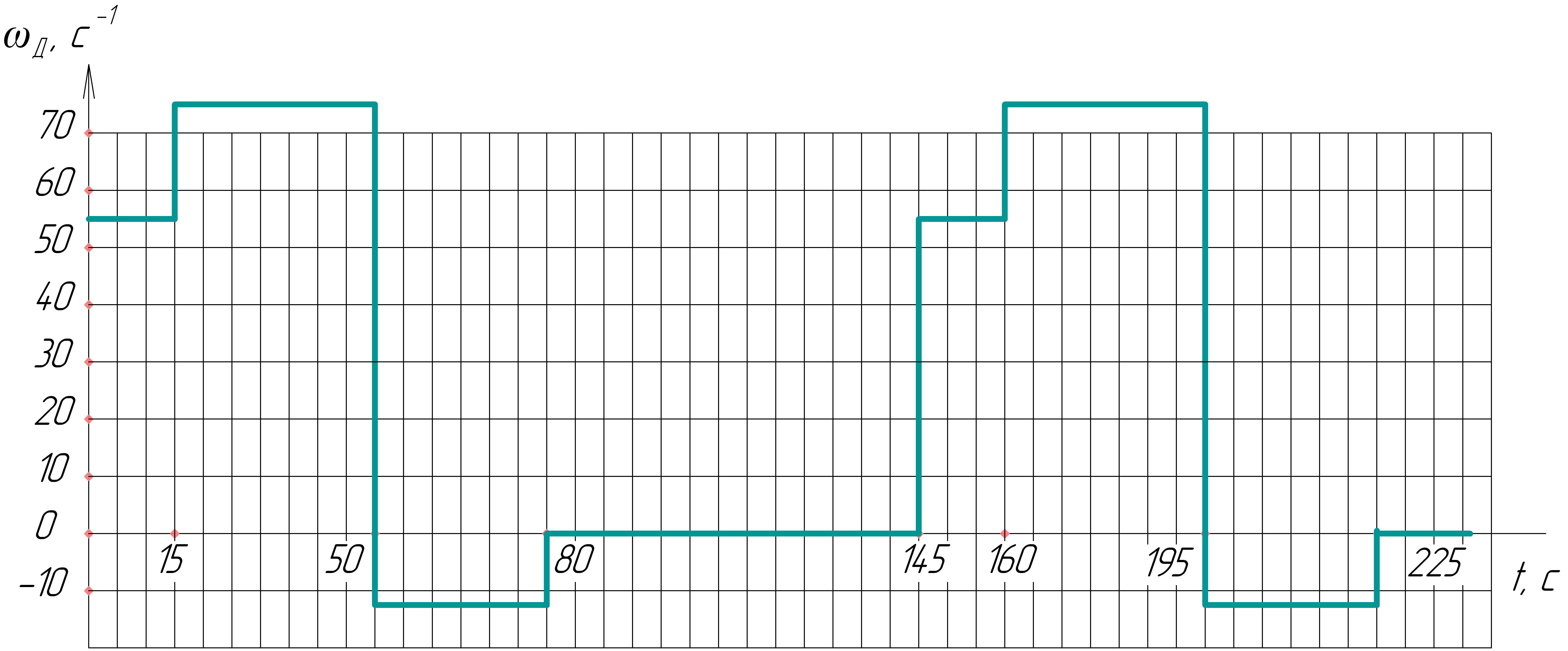 Рисунок 4 Тахограмма работы двигателя Момент холостого хода двигателя: Номинальный электромагнитный момент двигателя:  , ,где XK = Х1 + X`2 = 0,17 + 0,37 = 0,54 Ом;  – скорость синхронная. – скорость синхронная.Номинальный момент на валу: Рассчитаем приведенные к валу двигателя статические моменты:  . .Фактические моменты сопротивления: Характеристика момента сопротивления на валу двигателя показана в графической части проекта и на рисунке 5.  Рисунок 5 Характеристика момента сопротивления на валу двигателя   Регулирование скорости рабочего механизма Как правило, регулирование скорости рабочего механизма обеспечивается заданием различной скорости двигателя, поддержанием на заданном уровне изменением во времени по требуемым законам с определённой точностью. В связи с простотой технической реализации, в разомкнутой системе широкое применение находит регулирование скорости изменением параметров и управляющих воздействий, определяющих искусственные механические характеристики электропривода. В разомкнутой системе ТПЧ-Д возможны следующие способы управления двигателем: Изменением подводимого к двигателю напряжения; Введением добавочного активного и индуктивного сопротивлений в цепь статора; Введением добавочного активного сопротивления в цепь ротора; Изменением частоты питающей сети, например Определим на основной механической характеристике жесткость и скорость двигателя при МС1 = 309 Н·м; МНВ = 508 Н·м; ωн = 72,8 с-1; МC1 = 309 Н·м; Мхх = 9 Н·м; ω0 = 78,5 с-1 Моментам: Мс1,  где Таким образом, если принять участок механической характеристики АД линейным, то на основных характеристиках моментам МС1 = 309 Н·м; ω01 = ωС1 + Δω1 = 55 +3,5 = 58,5 с-1; ω02 = ωС2 + Δω2= 72,5 +3,8 = 76,3 с-1; ω03 = – (|ωС3| +|Δω3|)= – (12,5 + 2,7) = – 15,2 с-1. По условиям выбора способа регулирования скорости указано, что технологический процесс допускает изменение рабочих скоростей машин в пределах ± 3%. Исходя из данного допущения, принимаем решение, что двигатель будет работать на основной механической характеристике, расположенной ниже естественной, в точках Статические механические характеристики Статические механические характеристики проектируемых регулируемых электроприводов в первом приближении с учетом известных допущений линейны, поэтому в рамках курсового проекта рекомендуется их строить по двум точкам с координатами: 1. 2. Координаты точек для построения статических механических характеристик двигателя определяется следующим образом: Механические характеристики двигателя в системе ТПЧ-Д рассчитываются в предположении компенсации падения напряжения на активном сопротивлении обмотки статора, т.е. при законе частотного управления  , ,где UФi – значениефазного напряжения на i-м участке работы электропривода; I1i – значениетока на i-м участке работы электропривода (условно принят равным номинальному); f1i – значениечастоты напряжения на i-м участке работы электропривода. Предварительно определяем следующие параметры, обеспечивающие работу двигателя с заданными установившимися скоростями: Скорость синхронная Падение скорости на естественной характеристике и на искусственных характеристиках при пониженном напряжении питания при разных частотах скорости будут различными:  Соответствующие синхронные скорости ω02 = ωС2 + Δω2= 72,5 +3,8 = 76,3 с-1 Необходимые частоты напряжения на выходе ТПЧ: Напряжения на выходе ТПЧ, соответствующие этим частотам для каждого установившегося режима работы, определяются исходя из заданного закона частотного управления. Численное значение коэффициента А определяется из уравнения: Расчет переходных процессов. Расчет переходных процессов в разомкнутой системе электропривода при питании двигателя от вентильного преобразователя выполняется в предположении, что управление приводом осуществляется путем линейного изменения во времени скорости вращения магнитного поля, т.е. по закону: где 0 – ускорение скорости вращения магнитного поля, определяемое из условия полного использования двигателя по моменту. Так как скорость нарастания управляющего сигнала ограничивается, электромагнитная инерция силовой цепи двигателя в переходном процессе проявляется незначительно и ею можно пренебречь. Знак ускорения 0 > 0 при пуске в области положительных скоростей и при торможении в области отрицательных скоростей. 0 < 0 при пуске в области отрицательных скоростей и при торможении в области положительных скоростей. Ускорение скорости вращения магнитного поля 0, из условия полного использования двигателя по моменту в переходных процессах: где Мм – максимально допустимый момент двигателя в долях от критического момента:  , ,максимально допустимый момент двигателя Ускорение при разгоне привода |