Для определения запасов устойчивости в логарифмическом масштабе необходимо выполнить следующие операции: >> Gmlog=20*log10(Gm) Gmlog = 30.8182 Для построения АФХ (рис. 9) необходимо воспользоваться командой: >> nyquist(Ws) 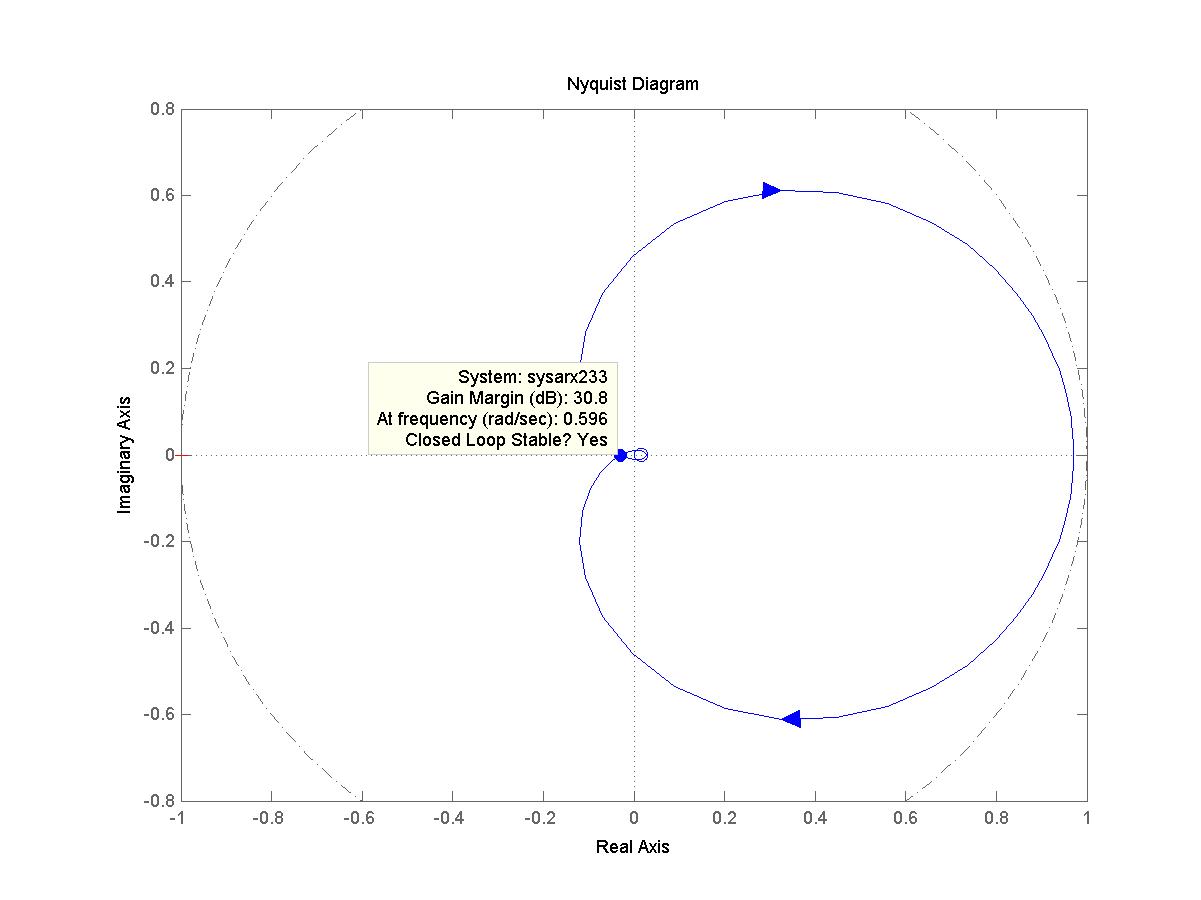
для непрерывной модели Критерием управляемости линейных стационарных объектов является условие: для того чтобы объект был вполне управляем, необходимо и достаточно, чтобы ранг матрицы управляемости равнялся размерности вектора состояний n . Для того, чтобы воспользоваться этой функцией необходимо вычислить матрицы A, B, C, D с помощью команды:
>> [A, B, C, D] = ssdata (sysarx233)
A =
-12.3970 -0.9887 -0.0334
4.0000 0 0
0 2.0000 0
B = 0.5000
0
0
C = 0.7857 -0.0518 0.0647
D = 0
Вычислим матрицу управляемости:
>> Mu=ctrb (A, B)
Mu =
0.5000 -6.1985 74.8659
0 2.0000 -24.7941
0 0 4.0000
Определим ранг матрицы управляемости:
>> nMu=rank(Mu)
nMu = 3
Определим ранг матрицы управляемости: >> n=rank(Mu) n = 3 Критерием наблюдаемости линейных стационарных объектов является условие: для того, чтобы объект был вполне наблюдаемым, необходимо и достаточно, чтобы ранг матрицы наблюдаемости равнялся размерности вектора состояния. Определим матрицу наблюдаемости и ее ранг с помощью функций пакета Control System Toolbox:
>> My=obsv(A,C)
My =
0.7857 -0.0518 0.0647
-9.9473 -0.6473 -0.0262
120.7278 9.7820 0.3318
Определим ранг матрицы наблюдаемости: >> n=rank(Mu) n = 3 В конечном счете для исследуемой модели объекта размерность вектора состояний, определяемая размером матриц A и С, равна 3 и ранг матрицы наблюдаемости MY также равен 3, что позволяет сделать вывод о том, что объект автоматизации является вполне наблюдаемым, т.е. для него всегда можно определить по значениям выходной величины y(t) вектор переменных состояния, необходимый для синтеза системы управления.
2.3.1 Анализ показателей качества регулирования имеющейся системы В ходе проведения идентификации была определена передаточная функция технологического объекта управления WТОУ , а так же проведен анализ показателей качества объекта автоматизации. Следующим этапом является оптимизация системы путем нахождения параметров автоматического регулятора WАР. Для этого в среде Matlab Simulink собирается структурно-математическая схема без автоматического регулятора (рис. 20), для того, чтобы определить показатели качества переходного процесса и сделать вывод о необходимости внедрения регулятора. 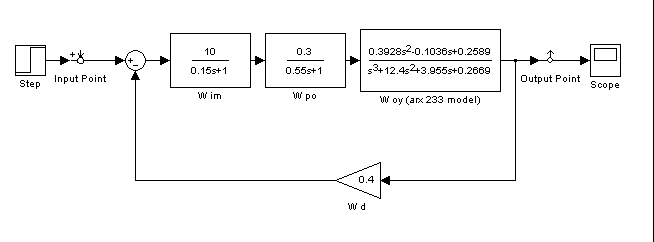
Рис. 10. Структурно-математическая схема технологического процесса без автоматического регулятора в среде Matlab Simulink. Wдатчика =0.4, Wрабочего органа=0.3/ (0.55p+1), Wисполнительного механизма =10/ (0.15р+1). W - передаточная функция исполнительного механизма; - передаточная функция исполнительного механизма;
 0.05999 z^2 + 0.04869 z + 0.01253 0.05999 z^2 + 0.04869 z + 0.01253
---------------------------------
z^5 - 1.251 z^4 + 0.3763 z^3
Передаточная функция технологического объекта регулирования. 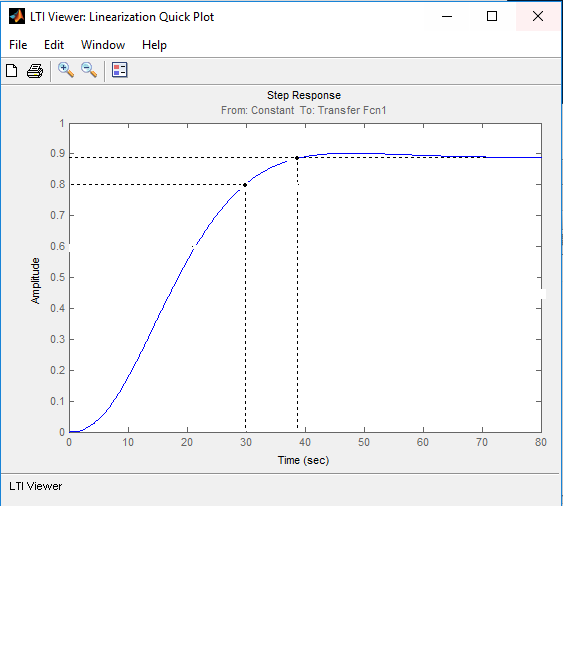
Рис. 11 Переходная характеристика технологического процесса
Переходная характеристика:
• Время регулирования составляет – 34.7465 с • Время нарастания – 30.8182 с 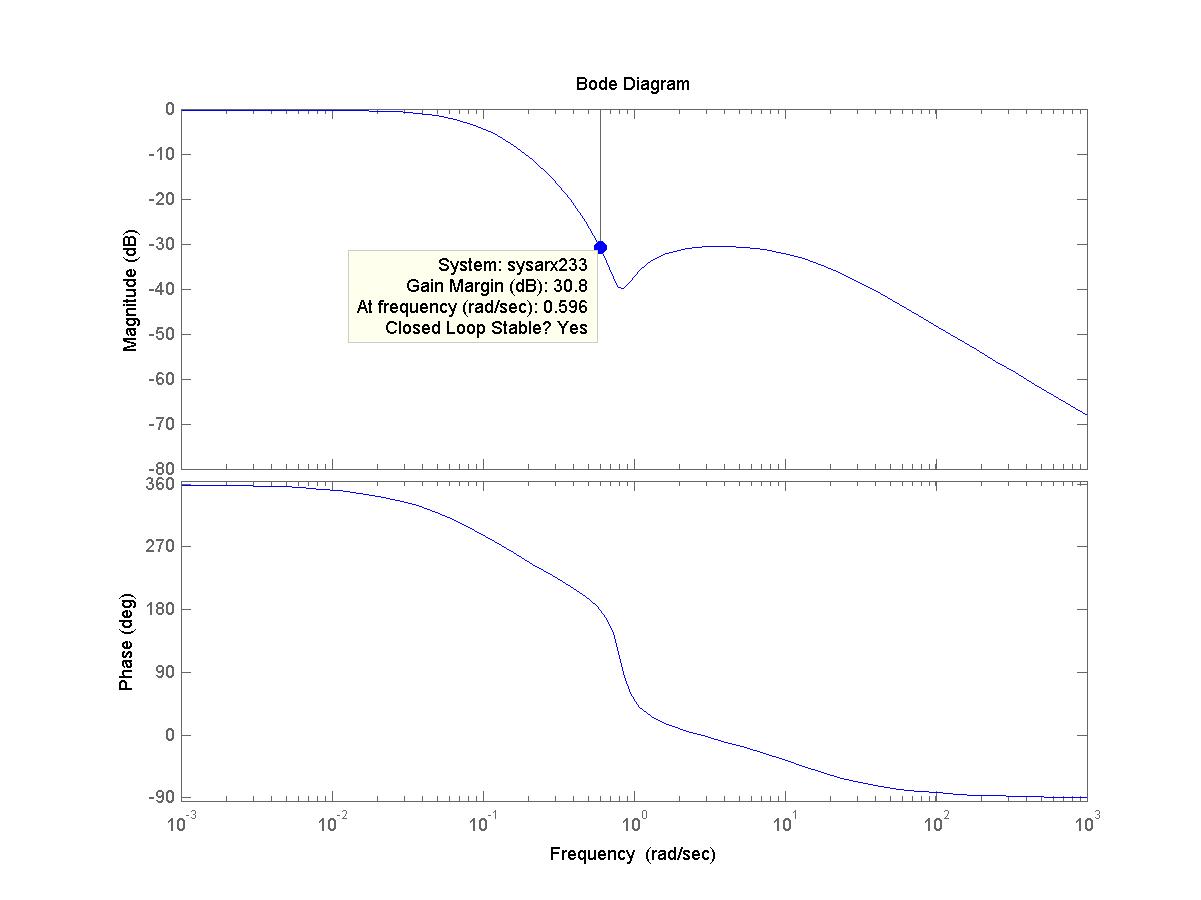
Рис.12 Амплитудно-частотная характеристика технологического процесса Частотная характеристика: Запас устойчивости по амплитуде – 25.5 дБ. |
 Скачать 2.35 Mb.
Скачать 2.35 Mb.