2.1. Обоснование выбора новой структуры модернизируемой системы автоматизации 
ЗТ – задатчик расхода; АР – автоматический регулятор; ИМ – исполнительный механизм; РО – регулируемый орган; ТОУ – технологический объект управления; Р – конечный расход сырьевой смеси. 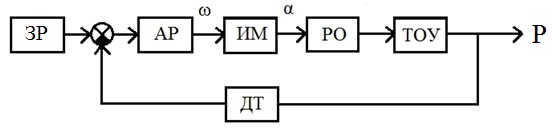
Рис.1. Структурная схема контура процесса автоматизации ректификационной колонны К-2 В структурно-математическую схему контура процесса автоматизации автоматизации ректификационной колонны К-2 (рис.2): Р объем фракции на входе в контура; WАР – передаточная функция автоматического регулятора; WИМ – передаточная функция исполнительного механизма; WТОУ – передаточная функция технологического объекта управления; WД – передаточная функция датчика; Р’ – объем отбеинзининой фракции на выходе 
Рис.2. Структурно-математическая схема контура автоматизации ректификационной колонны К-2.
Передаточные функции исполнительного механизма, регулирующего органа и датчика нам известны. Они имеют следующий вид: -Передаточная функция датчика: Kg = 0,4. -Передаточная функция регулируемого органа:  10/(0.15p+1) 10/(0.15p+1) -Передаточная функция исполнительного механизма:  Неизвестными являются передаточные функции автоматического регулятора WАР и технологического объекта управления WТОУ. Можно выдвинуть предположение, что имеющаяся система имеет недостатки, не позволяющие достигнуть максимальной экономической выгоды в ходе проведения процесса риформинга. Для выяснения этого необходимо найти передаточную функцию технологического объекта управления WТОУ путем проведения идентификации объекта ипровести для него анализ показателей качества. В случае несоответствия параметров системы заданным требованиям, провести оптимизацию системы путем нахождения параметров автоматического регулятора WАР. Идентификация и объекта и оптимизация системы производится в среде Matlab Simulink.
2.2 Идентификация объекта автоматизации Параметрическая идентификация объектов автоматизации технологических процессов производится с использованием пакетов расширения MATLAB System Identification Toolbox и Control System Toolbox. Экспериментальные данные процесса гидрокрекинга в реакторном блоке первой ступени заносятся в файл datta. Данные состоят из входных и выходных параметров системы. Входные параметры – подача дизельного топлива. Выходные параметры – температура отбинзининой нефти. В рабочую область MATLAB сначала загрузим исходные данные для составления файла данных с помощью команды: >> load datta В результате выполнения команды в рабочей области появились массив входных переменных u и массив выходного параметра y. Интервал дискретизации указывается дополнительно: >> Ts=3; Для объединения в единый файл исходных данных пользуются командой: >> dan=iddata(y (901:1000), u (901:1000), Ts) Вводим обозначения входных и выходных данных в структуру файла для наглядности: >> dan.inputn = 'Мощность'; >> dan.outputn = 'Температура '; Воспользуемся следующими командами для указания размерностей параметров файла: >> dan.inputUnit = '%'; >> dan.outputUnit = 'гр.С'; В конечном итоге сформированный файл данных dan.m имеет следующий вид: Domain: 'Time' Name: '' OutputData: [100x1 double] y: 'Same as OutputData'
|
 Скачать 2.35 Mb.
Скачать 2.35 Mb.