Запас устойчивости по фазе – 36.4 град 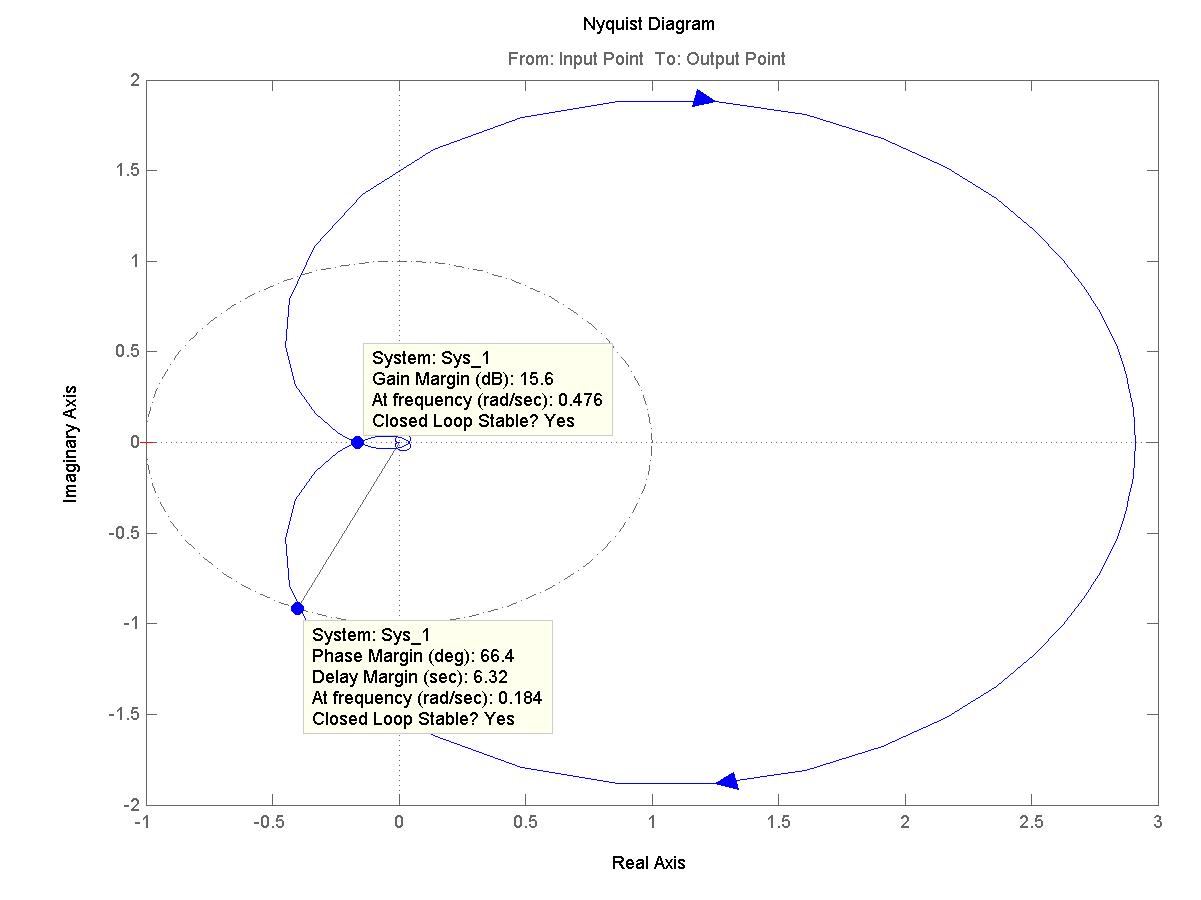
2.3.2 Нахождение параметров ПД-регулятора В среде Matlab Simulink собирается структурно-математическая схема с автоматическим регулятором (рис.15), которой на схеме обозначен как Subsistem. В данном случае будет использоваться ПД (пропорционально -дифференциальный) регулятор. Так же добавляется блок Signal Constrain. Для более качественного процесса оптимизации внедрим в отрицательную обратную связь еще одно усилительное звено (помимо передаточной функции датчика kd) и назовем его kg. В конечном итоге после проведения оптимизации мы получим оптимальные значения параметров ПИД-регулятора Kp, Kd, а так же оптимальное значение kg.
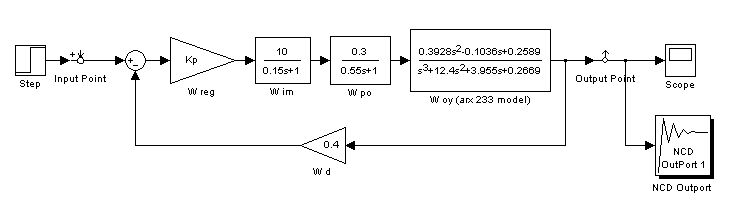
Рис. 14. Структурно-математическая схема в среде Matlab Simulink с регулятором. Для проведения оптимизации необходимо по графику переходного процесса передаточной функции технологического объекта управления WТОУ, найденного в ходе идентификации, рассчитать начальные значения ПД-регулятора, а конкретно Kp, Kd. На графике переходного процесса проводится касательная, далее рассчитываются параметры τ и Т0 исходя из графика (рис. 15). 
Рис. 15. Графический расчет начальных параметров ПД-регуляторов.
По виду переходной характеристики можно определить показатели качества переходного процесса:
Время регулирования составляет 19.1 с.
Установившееся значение – 1
Время нарастания – 13.5 с.
Полученные значения параметров регулятора заносим в Workspace и запускаем систему. После этого открываем NCD блок. В окне настройки оптимизируемых параметров задаем Kp, , Kd, и kg . Затем в окне настройки параметров оптимизируемой системы NCD блока виде ограничительных прямых задаем требования к показателям качества регулирования: максимальное перерегулирование – не более 10%, Время регулирования – не более 40 с, время нарастания – не более 15 с. Производим запуск NCD блока. В результате происходит оптимизация заданных параметров системы (рис. 16). 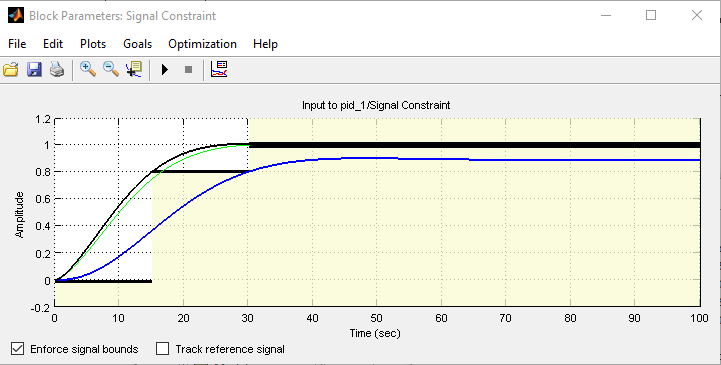
После завершения процесса на экран выводятся найденные оптимальные значения параметров:
2.3.2Анализ показателей качества регулирования оптимизированной системы и ее устойчивости После нахождения оптимальных параметров ПД-регулятора, таких как Kp, Ki и Kd, и значения kn, необходимо проанализировать устойчивость работы системы, переходный процесс и других характеристики, определяющие качество и надежность работы системы автоматизации. Для начала построим график переходного процесса оптимизированной системы (рис. 18). Рис. 18. Переходная характеристика оптимизированной системы
По виду переходной характеристики можно определить показатели качества переходного процесса:
Время регулирования составляет 19.1 с.
Установившееся значение – 1
Время нарастания – 13.5 с.
Статическая ошибка – 0
Перерегулирование - 1.7 %
. Далее построим амплитудно-частотную (АЧХ) и фазочастотную характеристики (ФЧХ) и выявим запасы устойчивости по амплитуде и фазе. (рис. 19) 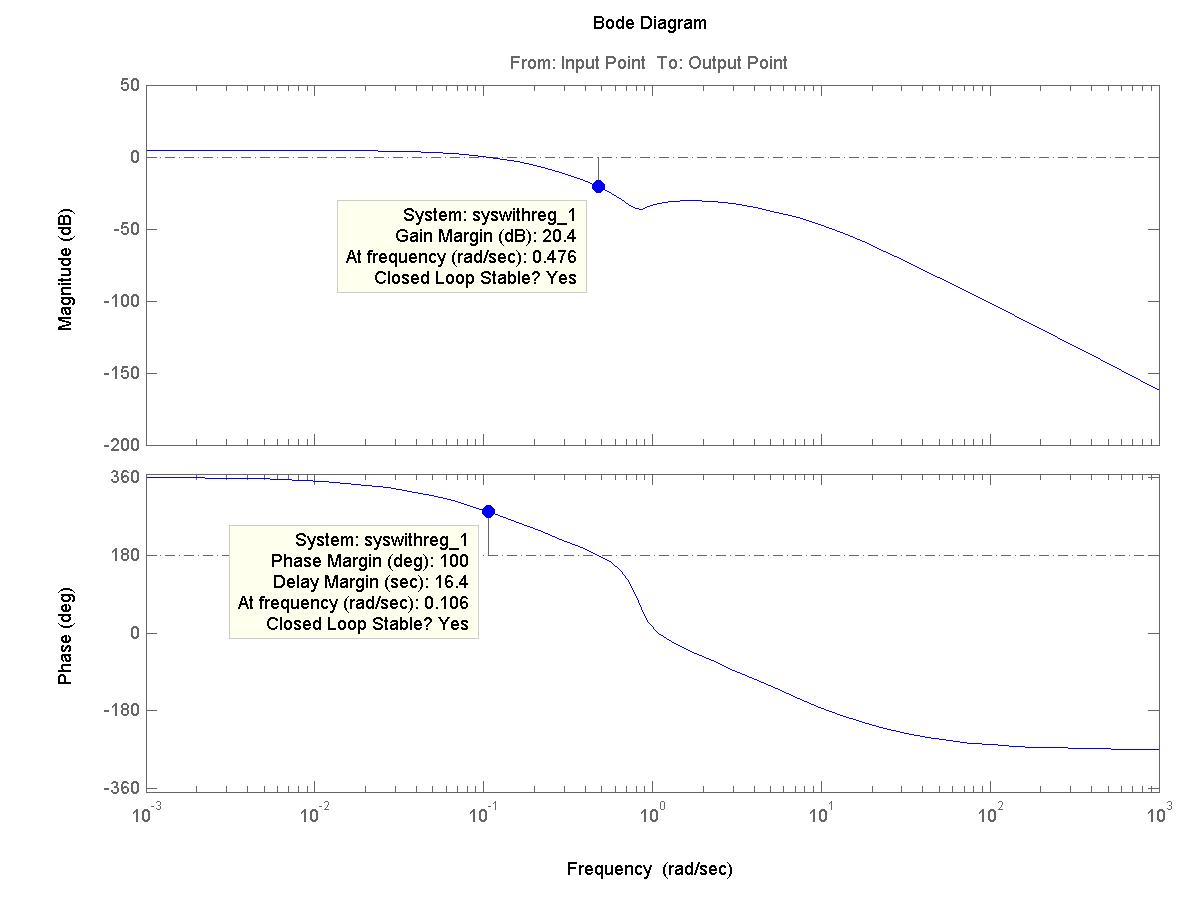
оптимизированной системы Запас устойчивостипо амплитуде составляет 20.4 дБ, полученные данные удлетворяют заданным требованиям к показателям качества регулирования. |
 Скачать 2.35 Mb.
Скачать 2.35 Mb.