КУРСОВОЙ ТДУ. Курсовой проект ТДУ. Курсовой проект по дисциплине Теория дискретных устройств на тему Синтез дискретного устройства управления напряжением в электротяговой сети
 Скачать 7.42 Mb. Скачать 7.42 Mb.
|

1 2 Словесное описание задачи телерегулирования напряжения в электротяговой сети Требуется разработать логическую схему устройства телерегулирования напряжения в электротяговой сети для заданного участка железнодорожной линии постоянного тока напряжением 3 кВ с определенным количеством межподстанционных зон при различных ситуациях формирования тяговых нагрузок на каждой из межподстанционных зон. Алгоритм телерегулирования напряжения должен быть энергоэкономичным и обеспечивать включение устройств регулирования на тяговых подстанциях только по питающим линиям контактной сети, смежным для межподстанционных зон, на которых требуется поддержание напряжения у токоприёмников высокоскоростных поездов не ниже минимального допустимого уровня и не выше максимального значения допустимого для шин тяговых подстанций. Устройство также должно обеспечивать отображение на рабочем месте энергодиспетчера обобщенной информации о снижении уровня напряжения ниже допустимого для всех межподстанционных зон. В проекте ограничимся рассмотрением той части системы телерегулирования напряжения, которая формирует сигнализацию о понижении уровня напряжений в контролируемых точках и выдает команды управления на повышение напряжения на шинах подстанции. Обозначение независимых логических переменных и логических функций при разработке дискретного устройства Логическая часть устройства телерегулирования должна содержать логические схемы, обеспечивающие решение логических уравнений. На рисунке 7 приведена схема телерегулирования напряжения для варианта участка высокоскоростной линии с четырьмя межподстанционными зонами. На схеме обозначены три логические схемы ЛС1, ЛС2 и ЛС3, которые требуется разработать. Датчики напряжения в нашем случае будут вырабатывать сигналы о состоянии уровня напряжения в контролируемых точках. Пусть датчики способны различать три состояния: ниже нормы, выше нормы, в норме. Для кодирования этих трех состояний при двоичном кодировании для каждого датчика потребуется два двоичных разряда z2z1. В качестве входных данных для схем ЛС1, ЛС2 используются логические переменные x1, x2, x3, x4. Каждая из этих логических переменных может принимать два значения LOG1 – напряжение в контролируемой точке ниже нормы и LOG0 – напряжение в контролируемой точке не ниже нормы. Закон кодирования для каждого датчика напряжения и правило вычисления логического сигнала Х приведены в таблице 1. Рисунок 7  Таблица 1 - Правило кодирования логического сигнала о понижении напряжения
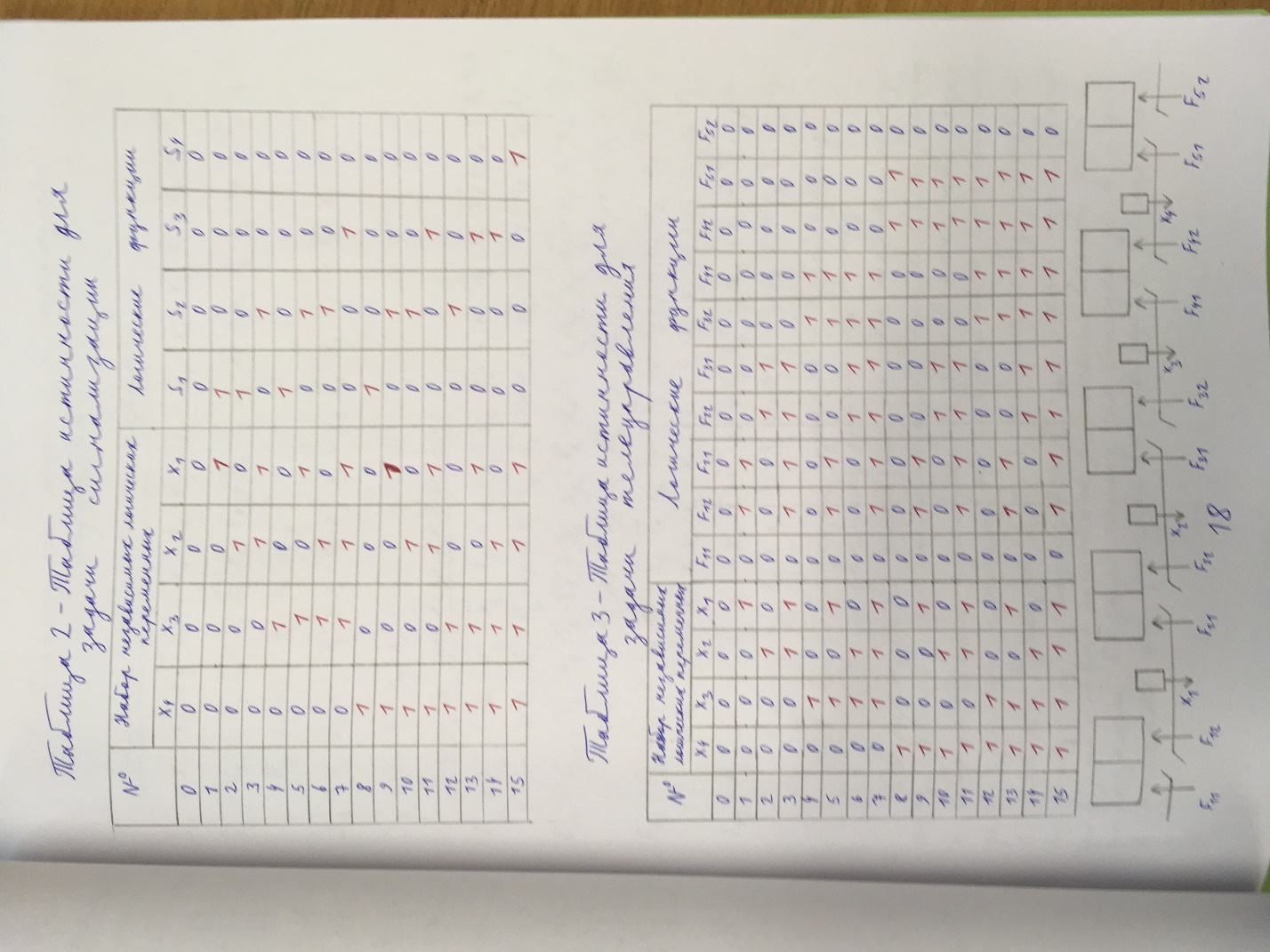
Схема ЛС1 должна формировать сигналы, отражающие информацию сигнализации на ДП о тех межподстанционных зонах, на которых уровень напряжения снизился ниже минимального допустимого значения. На вход ЛС1 из каналов связи ТИ через ЛС3 подаются сигналы от датчиков напряжения DH1…DH4, которые обрабатываются ЛС3 путем формирования логических переменных x1, x2, x3, x4. На выходе ЛС1 формируются зависимые логические переменные (логические функции), принимающие логическое значение LOG1: S1= f1(x1, x2, x3, x4) – о необходимости повышения напряжения в одной из четырех межподстанционных зон; S2= f2(x1, x2, x3, x4) – то же на двух зонах; S3= f3(x1, x2, x3, x4) – то же на трех зонах; S4= f4(x1, x2, x3, x4) – то же на четырех зонах. Схема ЛС2 должна формировать сигналы, задающие команду на повышение уровня напряжения на шинах подстанций. На вход схемы также подаются переменные x1, x2, x3, x4. На выходе ЛС2 формируются логические функции, принимающие логическое значение LOG1 (требуется повышение напряжения) или LOG0 (не требуется повышение напряжения). При этом значение LOG1 используется для формирования команд: F11=f5(x1, x2, x3, x4) – о включении на тяговой подстанции ТП1 первого выпрямительного агрегата на повышение уровня напряжения; F12=f6(x1, x2, x3, x4) – то же на ТП1 второго агрегата; F21=f7(x1, x2, x3, x4) – то же на ТП2 первого агрегата; F22=f8(x1, x2, x3, x4) – то же на ТП2 второго агрегата; F31=f9(x1, x2, x3, x4) – то же на ТП3 первого агрегата; F32=f10(x1, x2, x3, x4) – то же на ТП3 второго агрегата; F41=f11(x1, x2, x3, x4) – то же на ТП4 первого агрегата; F42=f12(x1, x2, x3, x4) – то же на ТП4 второго агрегата; F51=f13(x1, x2, x3, x4) – то же на ТП5 первого агрегата; F52=f14(x1, x2, x3, x4) – то же на ТП5 второго агрегата. Формирование логической задачи (словесное задание логической функции) Задача телесигнализации (оценка протяженности зоны пониженного напряжения): Логические функции s1, s2, s3, s4 принимают значение LOG1 («1») тогда и только тогда, когда независимые переменные x1, x2, x3, x4 принимают значение LOG1 («1») соответственно для одной применить x1, или x2, или x3, или x4; двух переменных x1, x2, или x2, x3, или x3, x4; для трех переменных x1, x2, x3 или x2, x3, x4; для четырех переменных x1, x2, x3, x4. Задача телеуправления: Логические функции Fij (F11, F12, F21, F22, F31, F32, F41, F42, F51, F52) принимают значение LOG1 («1») тогда и только тогда, когда возникает необходимость повышения напряжения на соответствующей зоне, отображаемой независимой переменной x1, или x2, или x3, или x4, принимающей значение LOG1 («1»). Функция повышения напряжения Fij принимает значение LOG1 («1»), если ее индексы i, j соответствуют номеру управляемого выпрямителя (j) на тяговых подстанциях, смежных с контролируемой зоной и соответствующим номером (i). Составление таблицы истинности Таблицы 2 и 3 иллюстрируют пример составления таблиц истинности для телеуправления по словесному заданию логической функции (вариант трех межподстанционных зон). Таблица 2 - Таблица истинности для задачи сигнализации
Таблица 3 - Таблица истинности для задачи телеуправления
  Переход от таблиц истинности к структурным формулам Задача телесигнализации     Задача телеуправления     Минимизация функций и преобразование к заданному логическому базису Структурные формулы имеют несложную структуру, поэтому для минимизации применяем метод алгебраических преобразований. В качестве базиса для примера примем функционально полный набор ЛЭ: ИЛИ – НЕ. Функции S1, S2, S3, S4 можно без упрощений преобразовать к базису ИЛИ – НЕ, для этого нужно дважды инвертировать логическое выражение, внести одно из отрицаний внутрь скобок (по формуле де Моргана) и записать полученное выражение в базисе ИЛИ-НЕ. Инверторы в базисе ИЛИ-НЕ реализуются подачей одного и того же сигнала на оба входа логического элемента. Таким образом для перевода сложного логического выражения в базис ИЛИ-НЕ надо для МКНФ записать выражение такого же вида, в котором все отрицания остаются при тех же аргументах функции, а все знаки & и заменяются стрелкой Пирса ↓. Если какая-то из элементарных дизъюнкций представлена в МКНФ всего одной переменной, то при переходе в базис ИЛИ-НЕ эта переменная инвертируется     Задача телеуправления Функция Fi,j после преобразований принимает простейший вид:     Функции тривиальны дальнейших преобразований не требуют. Переход от структурных формул к логическим Осуществляется в соответствии с правилом перехода от логических функций (ЛФ) к логическим схемам (ЛС): ЛС строится от входа к выходу в порядке выполнения логических операций, определяемом правилами алгебры логики, с применением ЛЭ (см. Приложение 3) и функциональных элементов комбинационных схем (см. Приложение 4). Реализация схемы, в соответствии с преобразованными к базису ИЛИ-НЕ структурными формулами, приведена на рисунке 8. 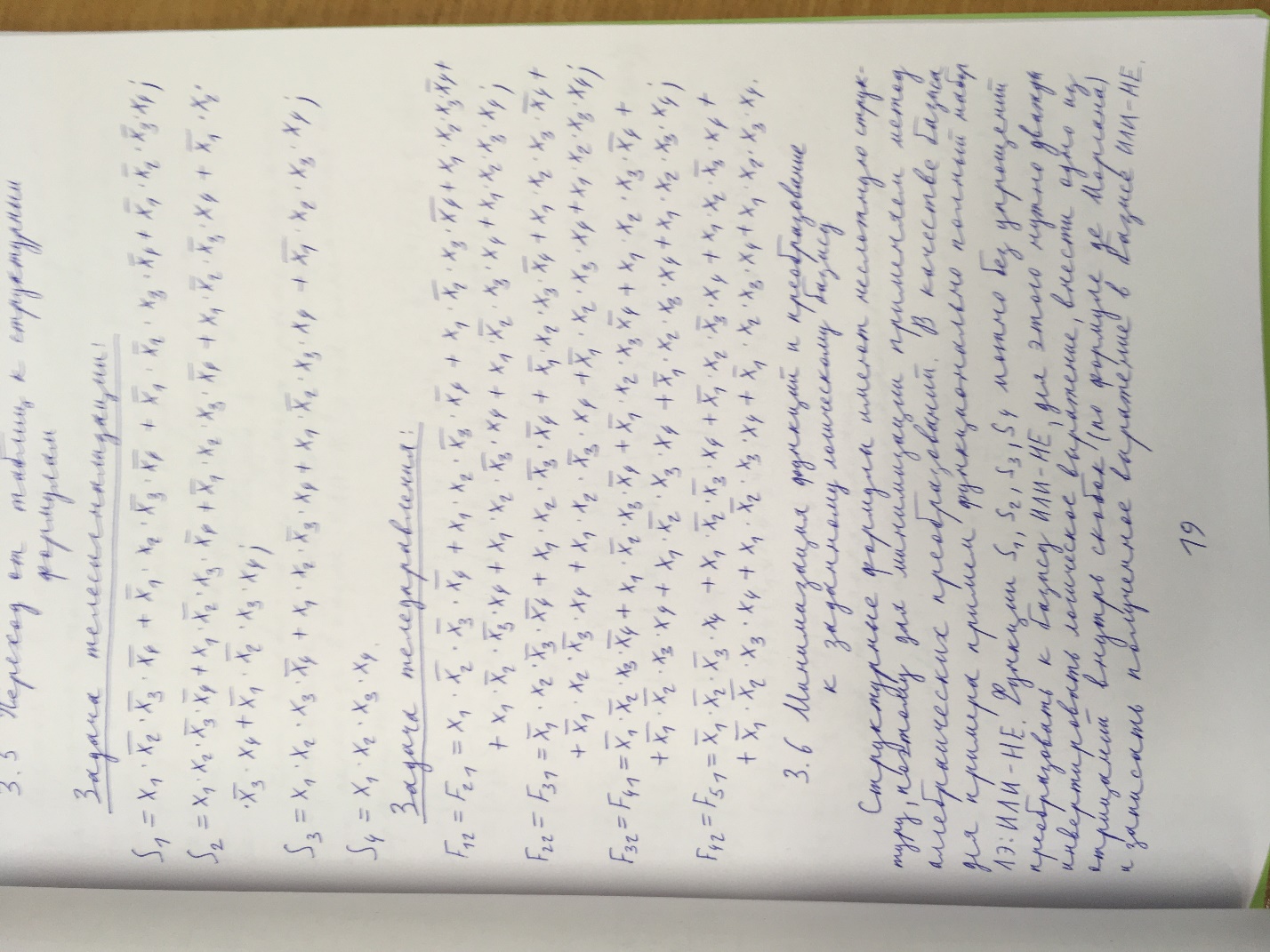 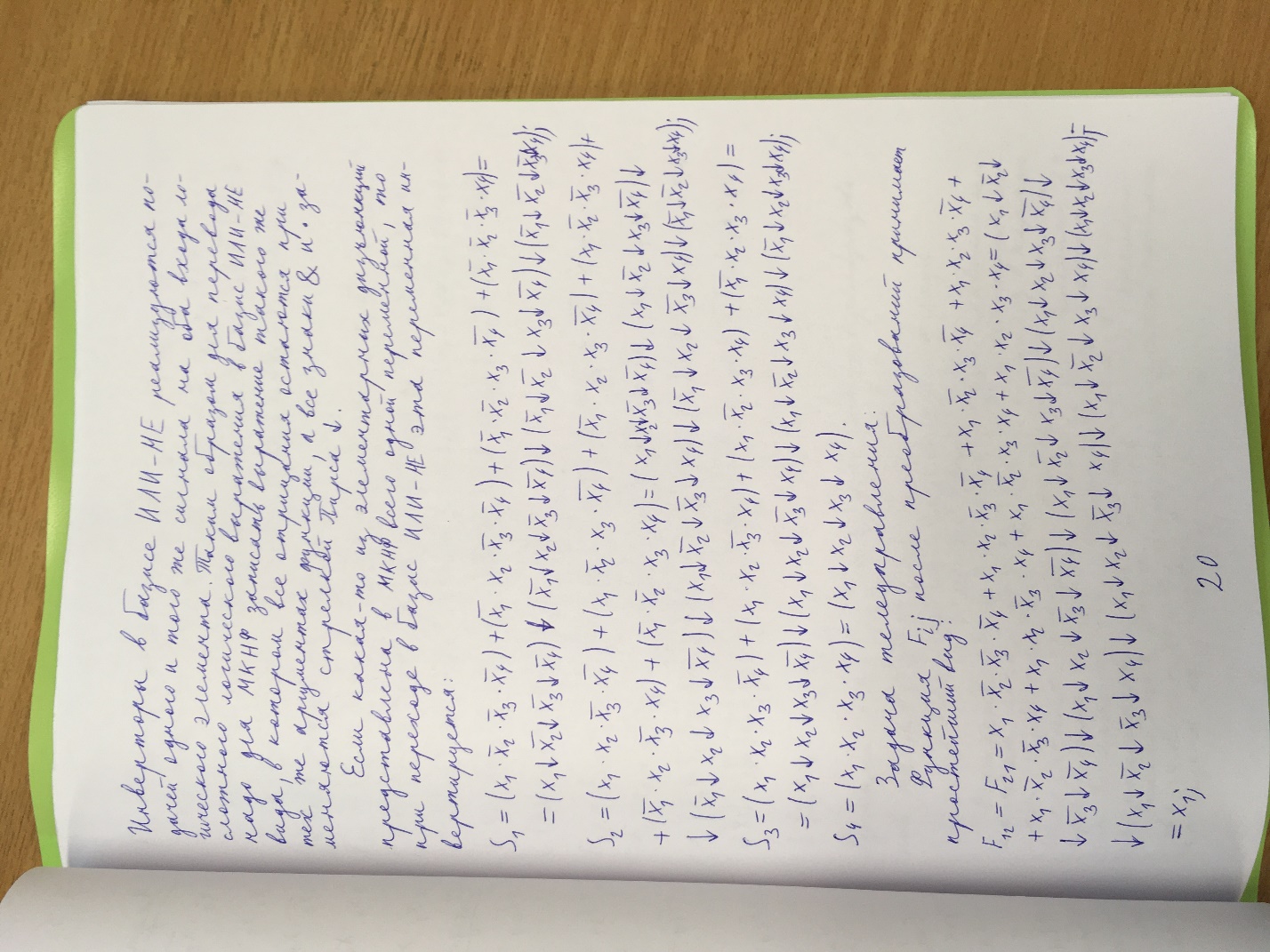 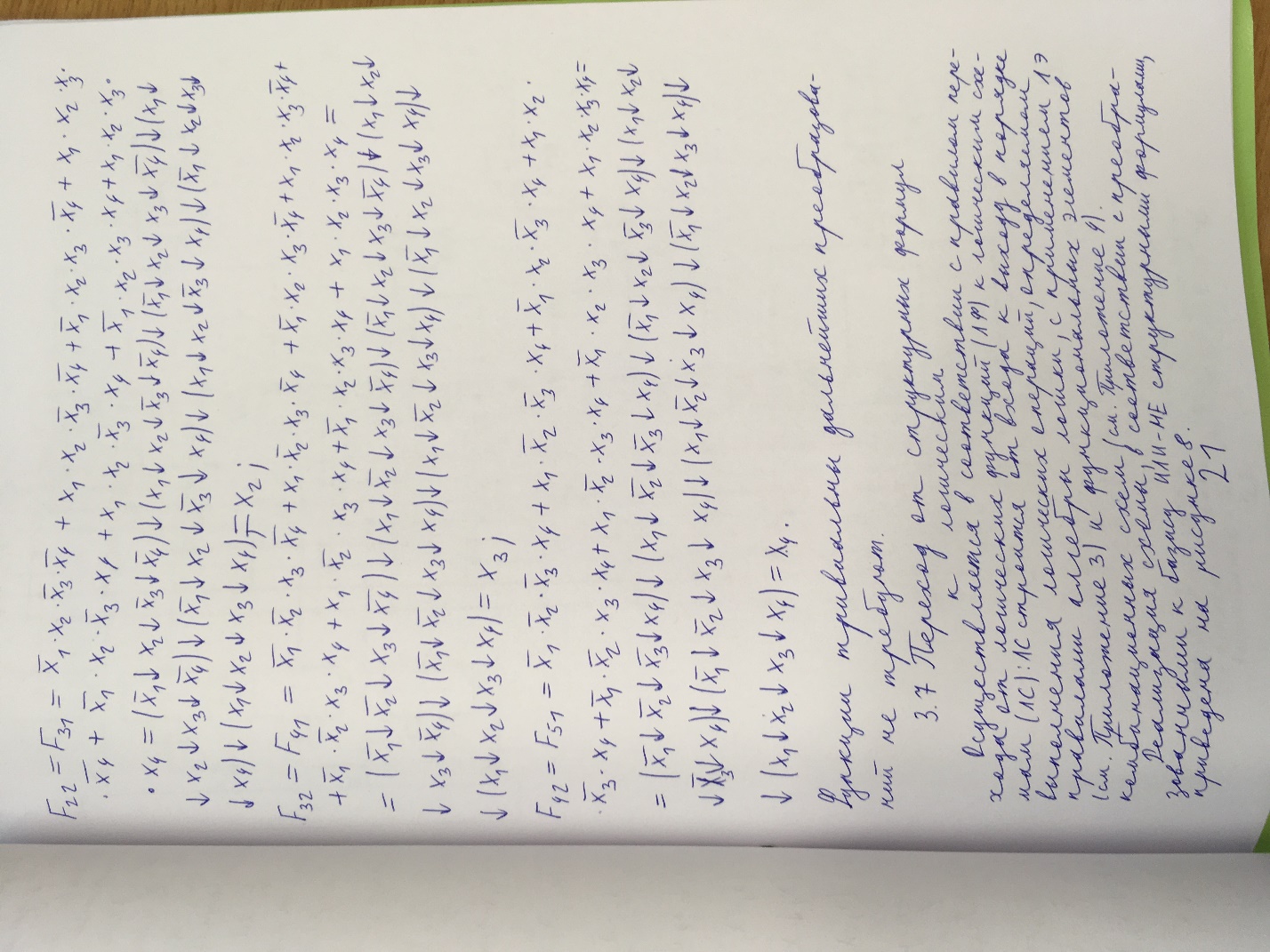 Рисунок 8  Задача телеуправления Реализовать получение сигналов при управлении на повышение напряжения на шинах подстанций для соответствующих зон можно разными простыми способами, например, используя по два последовательно включенных инвертора для каждой выходной функции. Но предпочтительно использовать простые программируемые логические матрицы (ПЛМ). В рассматриваемом примере можно принять ПЛМ с четырьмя входами (х1,х2,х3,x4; s=4) и восьмью выходами (F12,F21,F22,F31,F32,F41,F42,F51;t=8) Условное графическое обозначение такой матрицы приведено на рисунке 9.  КОНСТРУИРОВАНИЕ ЯЧЕЙКИ ДИСКРЕТНОГО УСТРОЙСТВА Выбор способа конструирования ячейки При конструировании дискретного устройства следует учитывать следующее. Ячейка дискретного устройства должна быть реализована в виде функционального элемента блочной системы телемеханического управления устройствами тягового электроснабжения. В современной схемотехнике в конструировании ячеек управления, как правило, применяется метод печатного монтажа (модульная конструкция). Модульная конструкция обеспечивает высокое заполнение объема, ускоряет процесс проектирования, подготовки производства. В модульной технологии имеются предпосылки для унификации конструкции, что позволяет один и тот же тип ячейки использовать для компоновки различных типоисполнений аппаратуры управления. На рисунке 10 показана конструкция ячейки управления, представляющая собой плоский модуль на печатной плате с навесными элементами и печатным монтажом.  Рисунок 10. Конструкция ячейки управления Печатная плата состоит из следующих основных элементов: проводника – токопроводящего покрытия определенной конфигурации, нанесенного на изоляционное основание; печатных и/или навесных элементов. Печатные элементы или конструкции (резисторы, конденсаторы, разъемы и т.д.) наносятся на изоляционное основание в виде металлического или изоляционного покрытия. Навесные (дискретные) элементы наносятся методом пайки. Процесс изготовления изоляционной платы с печатным монтажом состоит из двух операций: создания изображения печатных проводников и создания токопроводящего слоя на изоляционном основании электрохимическим или химическим способом. Ячейку дискретного устройства выполняющего функции телесигнализации и телеуправление в заданном логическом базисе ИЛИ– НЕ удобно конструировать с применением интегральных микросхем. Так как микросхема в интегральном исполнении характеризуется большой надежностью, по сравнению с отдельными элементами (диодами, резисторами), в случае простых логических формул удобно применять программируемые логические матрицы. Следовательно, логическую реализующую функции телесигнализации выполняем на интегральных микросхемах. Логическая схема реализует функции телесигнализации в соответствии с заданным логическим базисом ИЛИ – НЕ выполняется на основе тех интегральных микросхем, которые заданы логическими функциями. В справочнике «Интегральные микросхемы: Справочник / Б.В. Тарабрин, Л.Ф. Лунин, Ю.Н. Смирнов и др. Под ред. Б.В. Тарабрина.» выбираем микросхему К155ЛЕ1, выполненную на ТТЛ. Микросхема представляет собой четыре логических элемента 4ИЛИ-НЕ. Корпус К561ЛЕ6 типа 201.14-1, вес 1,9 г. 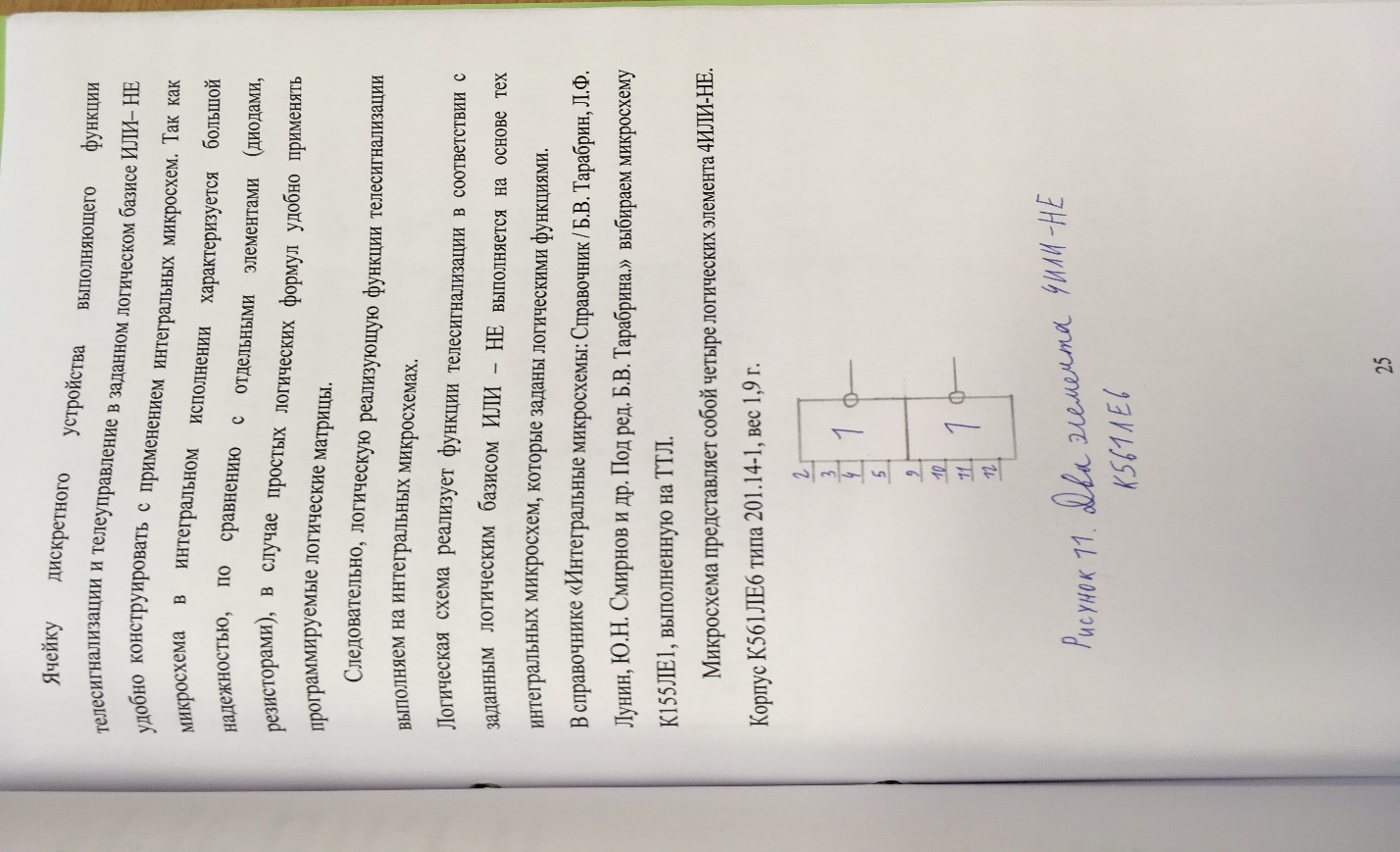 4.2 Разработка монтажной схемы ячейкиДанная плата реализуется в программе EasyEda. На рисунке 12 представлен эскиз токопроводящих дорожек. На схеме представлены ЛЭ К561ЛЕ. 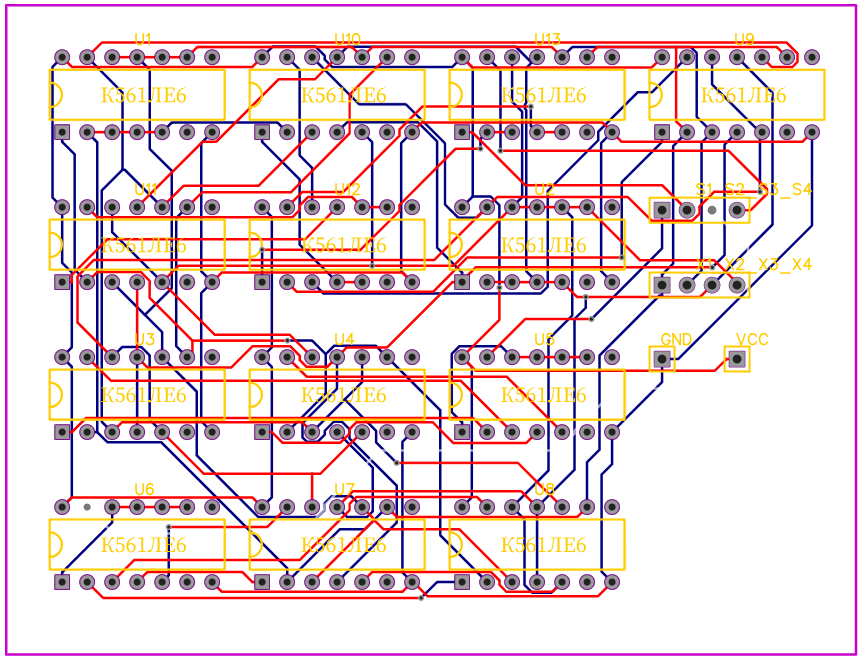 Рисунок 12. Эскиз платы для ЛС1 На рисунке 13 и 14 представлены обе стороны монтажной платы для реализации ЛС1. 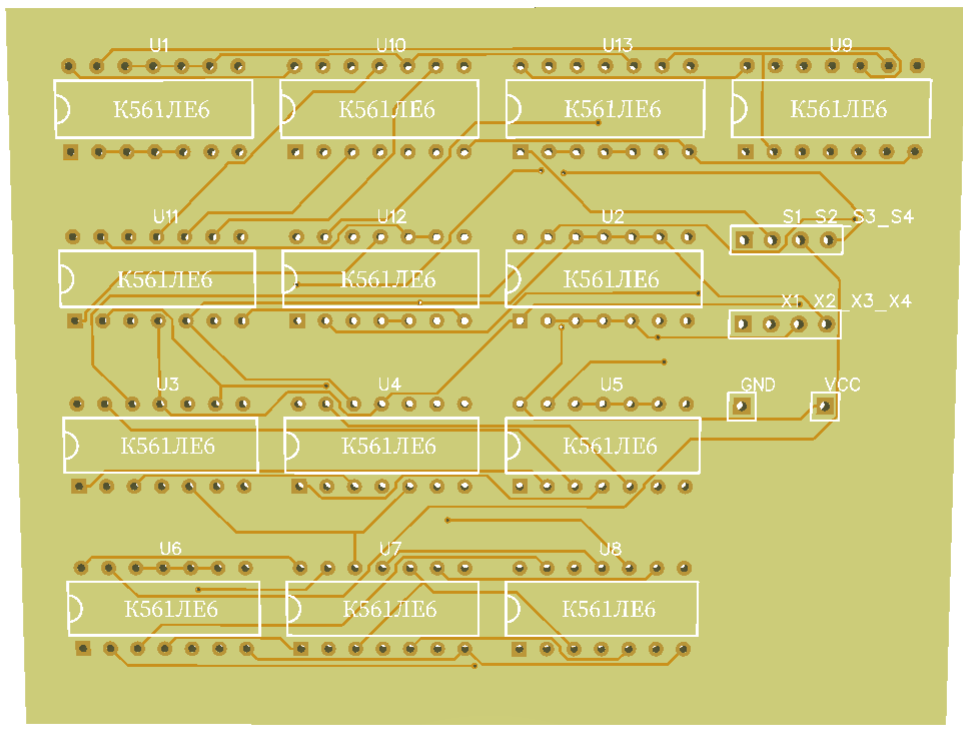 Рисунок 13. Лицевая сторона монтажной платы 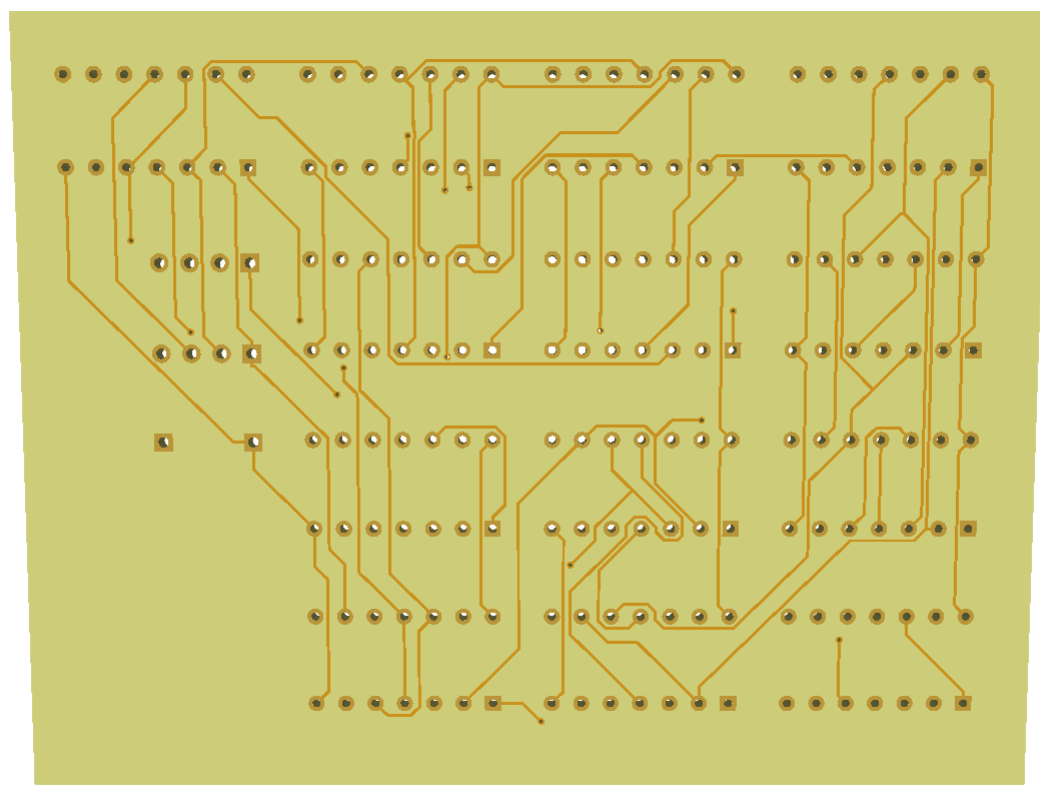 Рисунок 14. Обратная сторона монтажной платы для ЛС1 Заключение Библиографический список1. Сапожников В.В. и др. Теория дискретных устройств железнодорожной автоматики, телемеханики и связи: Учебник для вузов ж.-д. тр-та. -М.: УМК МПС России, 2001.-312 с. 2. Теория передачи сигналов на железнодорожном транспорте: Учебник для вузов ж.-д. тр-та / Г.В.Горелов и др.-М.: Транспорт, 1999.-415 с. 3. Синтез дискретного устройства управления напряжением в электротяговой сети: Методические указания к курсовому проекту. 1 2 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||