лабороторная я по роботизации. Лаб-1.МТМз-191-Ержонкова. Лабораторная работа 1 Изучение кинематики скоростных характеристик и систем координат робота
 Скачать 1.32 Mb. Скачать 1.32 Mb.
|

|
Выполнил ст. гр. МТМз-191 Ержонкова И.С. Лабораторная работа №1 Изучение кинематики скоростных характеристик и систем координат робота Цель работы — ознакомиться с основными свойствами кинематики промышленного робота, получить знания по существующим системам координат промышленных роботов, на практике научиться определять скорость перемещения звеньев робота для оценки последующей оптимизации управляющих программ. Выполнение работы - Назначение и область применения. Промышленные роботы предназначены для замены человека при выполнении основных и вспомогательных технологических операций в процессе промышленного производства. При этом решается важная социальная задача - освобождения человека от работ, связанных с опасностями для здоровья или с тяжелым физическим трудом, а также от простых монотонных операций, не требующих высокой квалификации. Гибкие автоматизированные производства, создаваемые на базе промышленных роботов, позволяют решать задачи автоматизации на предприятиях с широкой номенклатурой продукции при мелкосерийном и единичном производстве. - Классификация промышленных роботов: -по характеру выполняемых операций: основные, вспомогательные, универсальные; -по виду производства: литейные, сварочные, кузнечно-прессовые, для механической обработки, сборочные, окрасочные, транспортно-складские; -по системе координат руки манипулятора: прямоугольная, цилиндрическая, сферическая, сферическая угловая (ангулярная), другие; -по числу подвижностей манипулятора; -по грузоподъемности: сверхлегкие (до 10 Н), легкие (до 100 Н), средние (до2000 Н), тяжелые (до 10000 Н), сверхтяжелые (свыше 10000 Н); -по типу силового привода: электромеханический, пневматический, гидравлический, комбинированный; -по подвижности основания: мобильные, стационарные; -по виду программы: с жесткой программой, перепрограммируемые, адаптивные, с элементами искусственного интеллекта; -по характеру программирования: позиционное, контурное, комбинированное. - Принципиальное устройство промышленного робота Манипулятор промышленного робота по своему функциональному назначению должен обеспечивать движение выходного звена и закрепленного в нем объекта манипулирования в пространстве по заданной траектории и с заданной ориентацией. Для полного выполнения этого требования основной рычажный механизм манипулятора должен иметь не менее шести подвижностей, причем движение по каждой из них должно быть управляемым. Рассмотрим устройство промышленного робота с трех подвижным манипулятором (рис.1). Основной механизм руки манипулятора состоит из трех модулей: одного поворотного 1 и двух модулей линейного перемещения 2 и 3. Структурная схема механизма этого манипулятора соответствует цилиндрической системе координат. 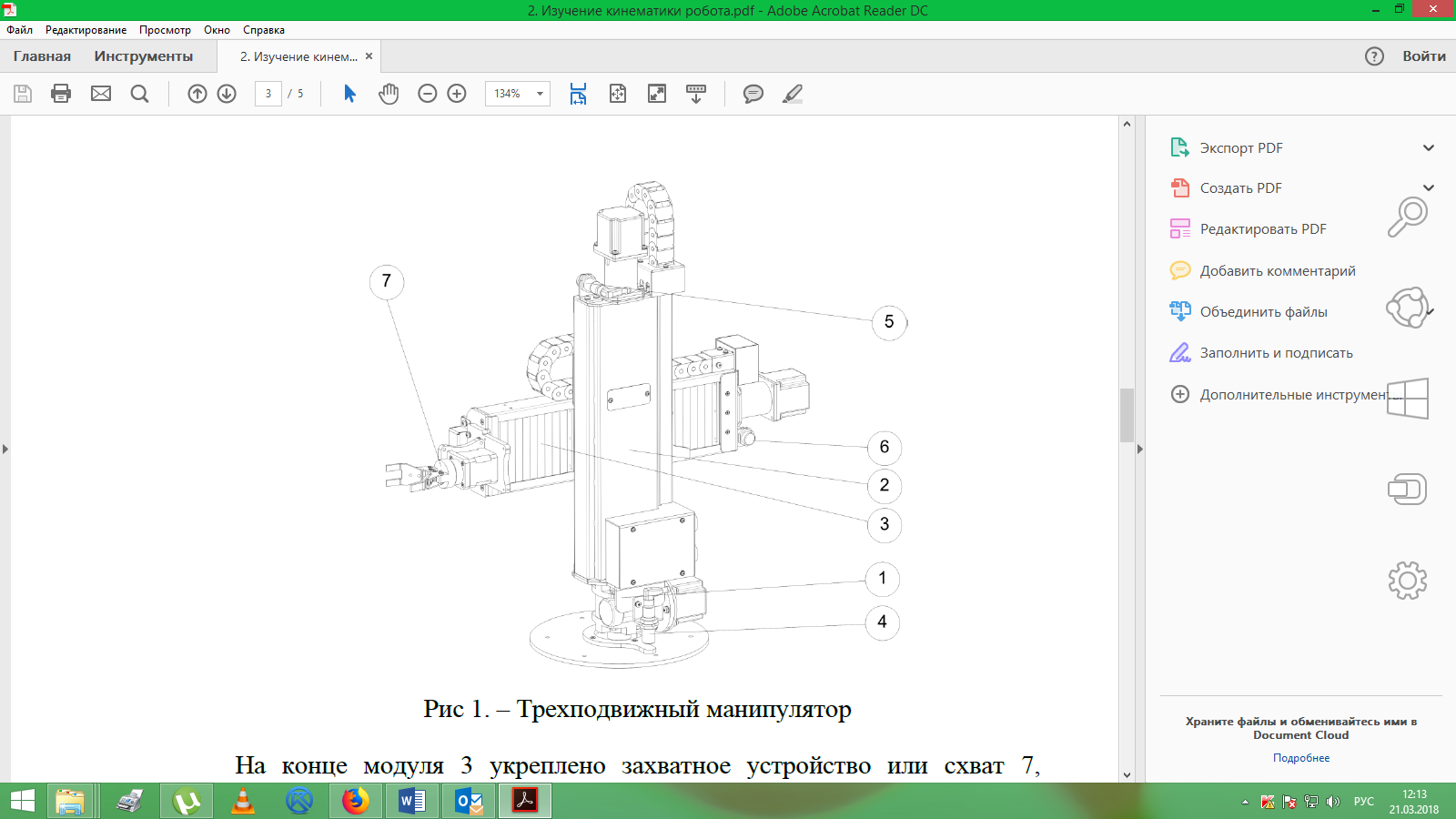 Рис 1. Трех подвижный манипулятор На конце модуля 3 укреплено захватное устройство или схват 7, предназначенный для захвата и удержания объекта манипулирования при работе манипулятора. Звенья основного рычажного механизма манипулятора образуют между собой три одноподвижные кинематические пары (одну вращательную А и две поступательные В и С) и могут обеспечить перемещение объекта в пространстве без управления его ориентацией. Для выполнения вращательного движения звено 1 оснащено двигателем с редуктором и датчиком обратной связи 4. Звенья 2 и 3 оснащены двигателями и шарико-винтовой парой, а также датчиками обратной связи 5 и 6. Рассмотрим, кинематическую схему робота (рис.2) 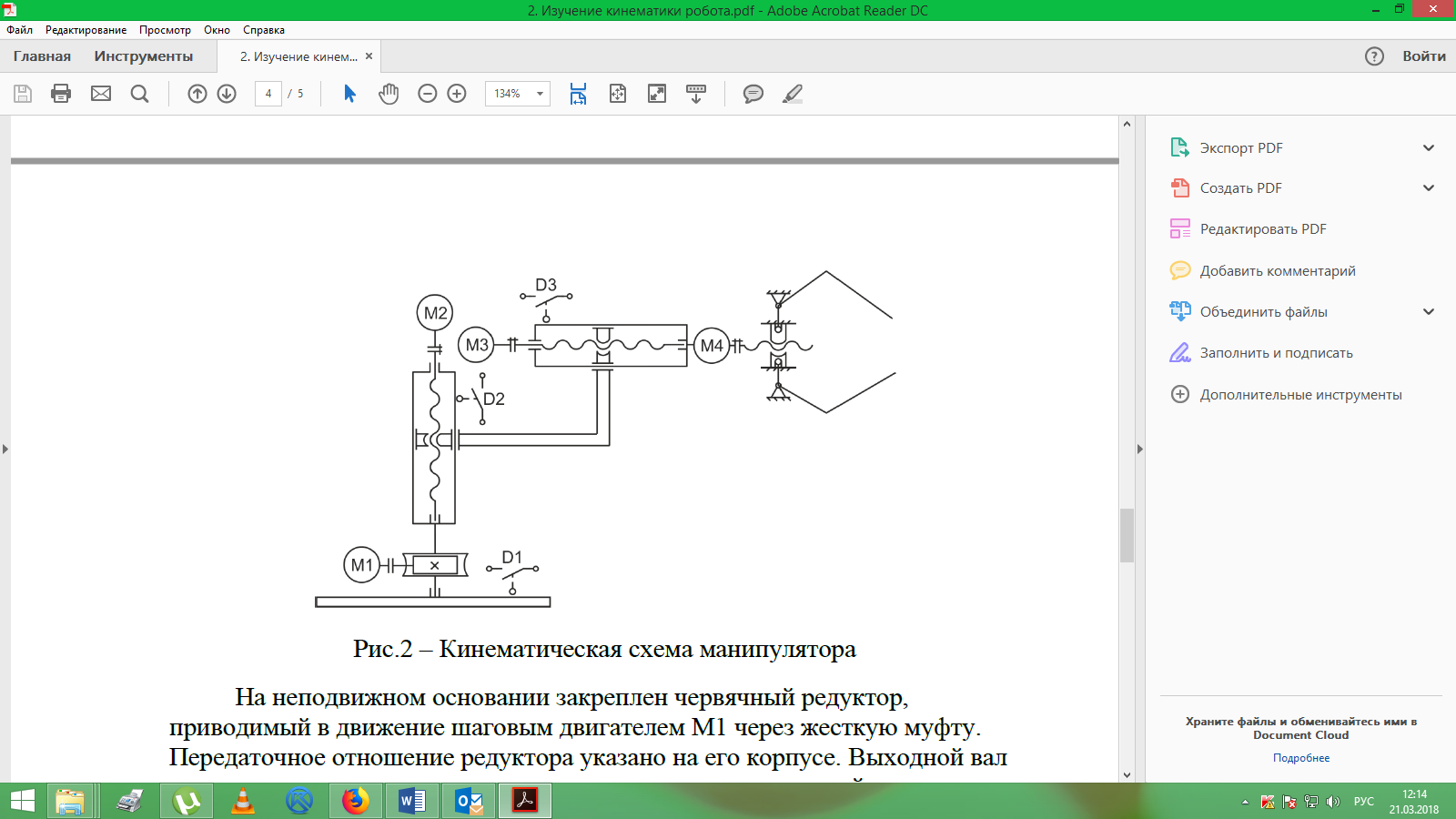 Рис.2 Кинематическая схема манипулятора На неподвижном основании закреплен червячный редуктор, приводимый в движение шаговым двигателем М1 через жесткую муфту. Передаточное отношение редуктора указано на его корпусе. Выходной вал червячного редуктора жестко соединен с вертикальным линейным модулем 2.На линейном модуле 2 каретки скольжения движутся по направляющим, закрепленным на корпусе модуля. Подвижная часть приводится в движение винтом и гайкой ШВП, шаг винтов 4 мм, винт вращается шаговым двигателем М2, вращение передается через гибкую муфту, винт ШВ П установлен в опорах с подшипниками. Подвижная часть модуля 1 жестко соединена с подвижной частью горизонтального модуля перемещения 2, устройство которого аналогично устройству модуля 1, приводится в движение шаговым двигателем М3. На конце модуля 2 установлено захватное устройство (схват), представляющее собой шарнирно-рычажный механизм, приводимый в движение шаговым двигателем М4, вал которого жестко соединен с ходовым винтом пары «винт-гайка», которая в свою очередь обеспечивает движение рычагов схвата, с установленными на них захватными губками. - Системы координат робота Число степеней подвижности и каждое движение робота обеспечивается соответствующей кинематической схемой его механизмов. Разработана классификация кинематических структурных схем руки и манипуляторов, состоящая из пар: 1 – ВВВ, трех вращательных; 2 – ВВП, двух вращательных и одной поступательной; 3 – ПВП, ВПП, ППВ, двух поступательных и одной вращательной; 4 – ППП – трех поступательных. Характер переносных степеней подвижности (поступательных и вращательных) определяет базовую систему координат манипулятора. Если поступательных переносных степеней подвижности три (П=3), а вращательных вообще нет (В=0), то базовая система координат является прямоугольной, а рабочая зона имеет форму параллелепипеда (рис.3). 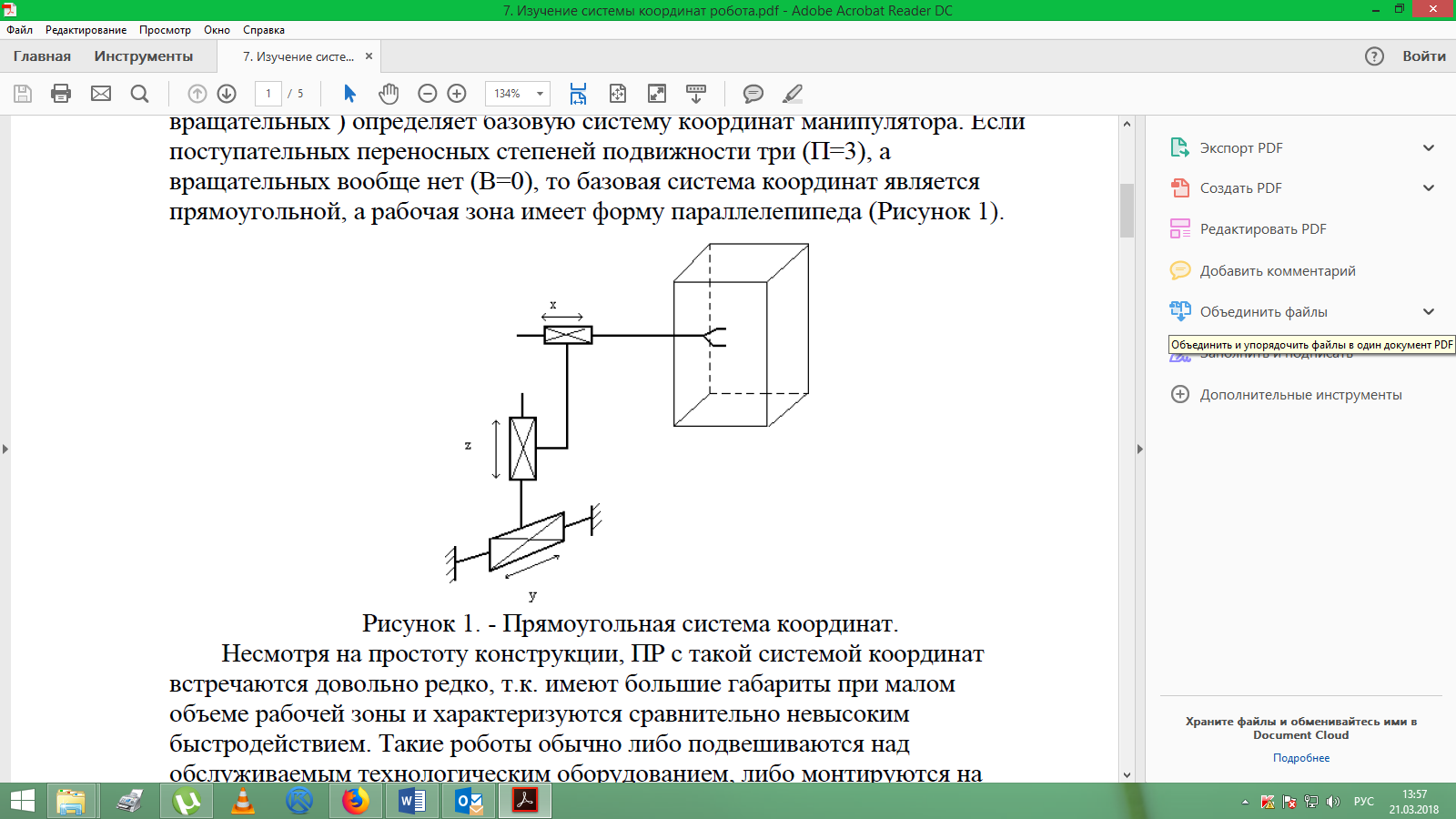 Рис.3. Прямоугольная система координат В том случае, когда П=2, В=1, рабочая зона ПР приобретает цилиндрическую форму, вернее форму неполного цилиндра (рис. 4). 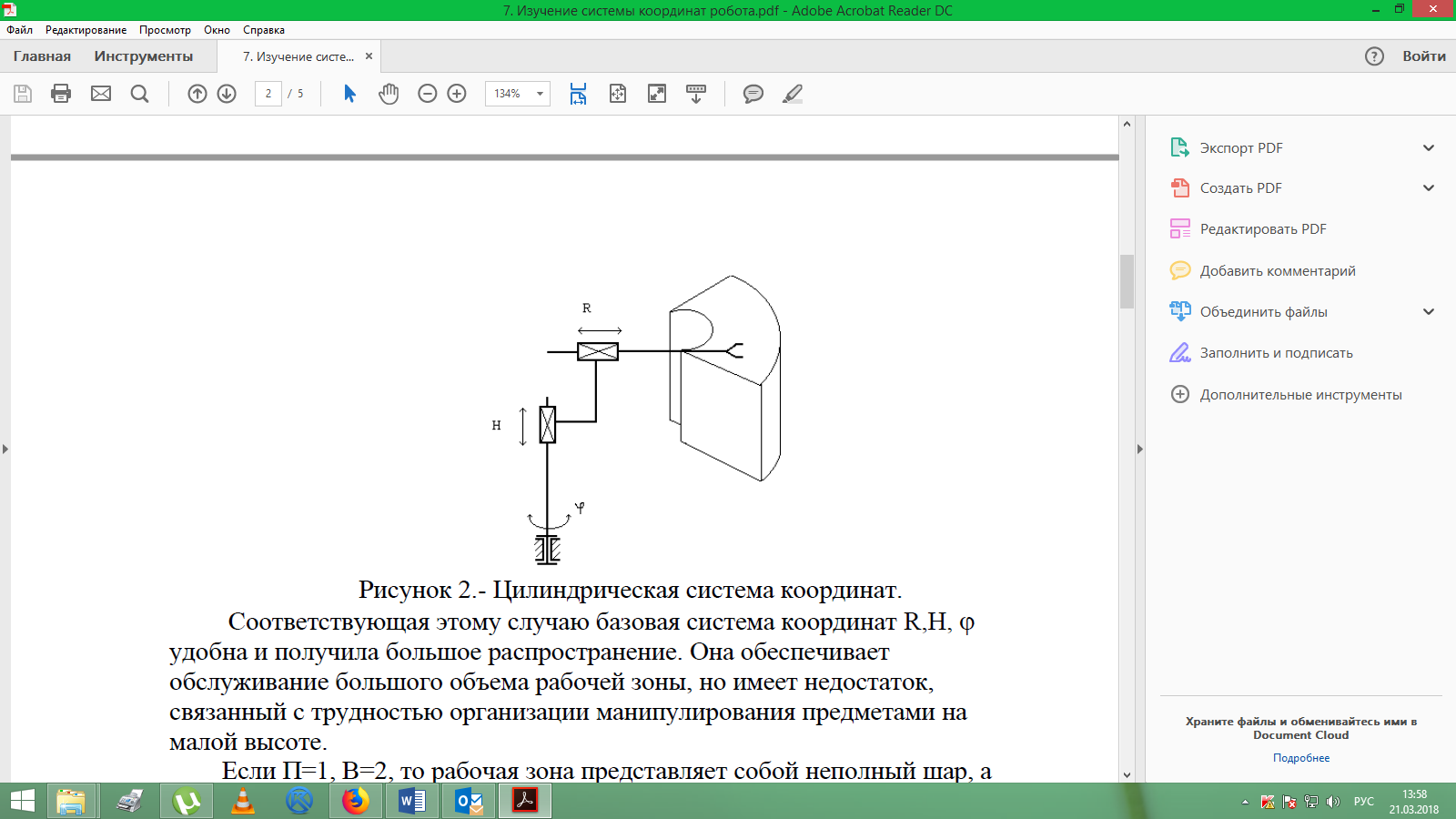 Рис.4. Цилиндрическая система координат Если П=1, В=2, то рабочая зона представляет собой неполный шар, а базовая система координат R, θ, φ является сферической. Это наиболее универсальная система координат (рис.5). 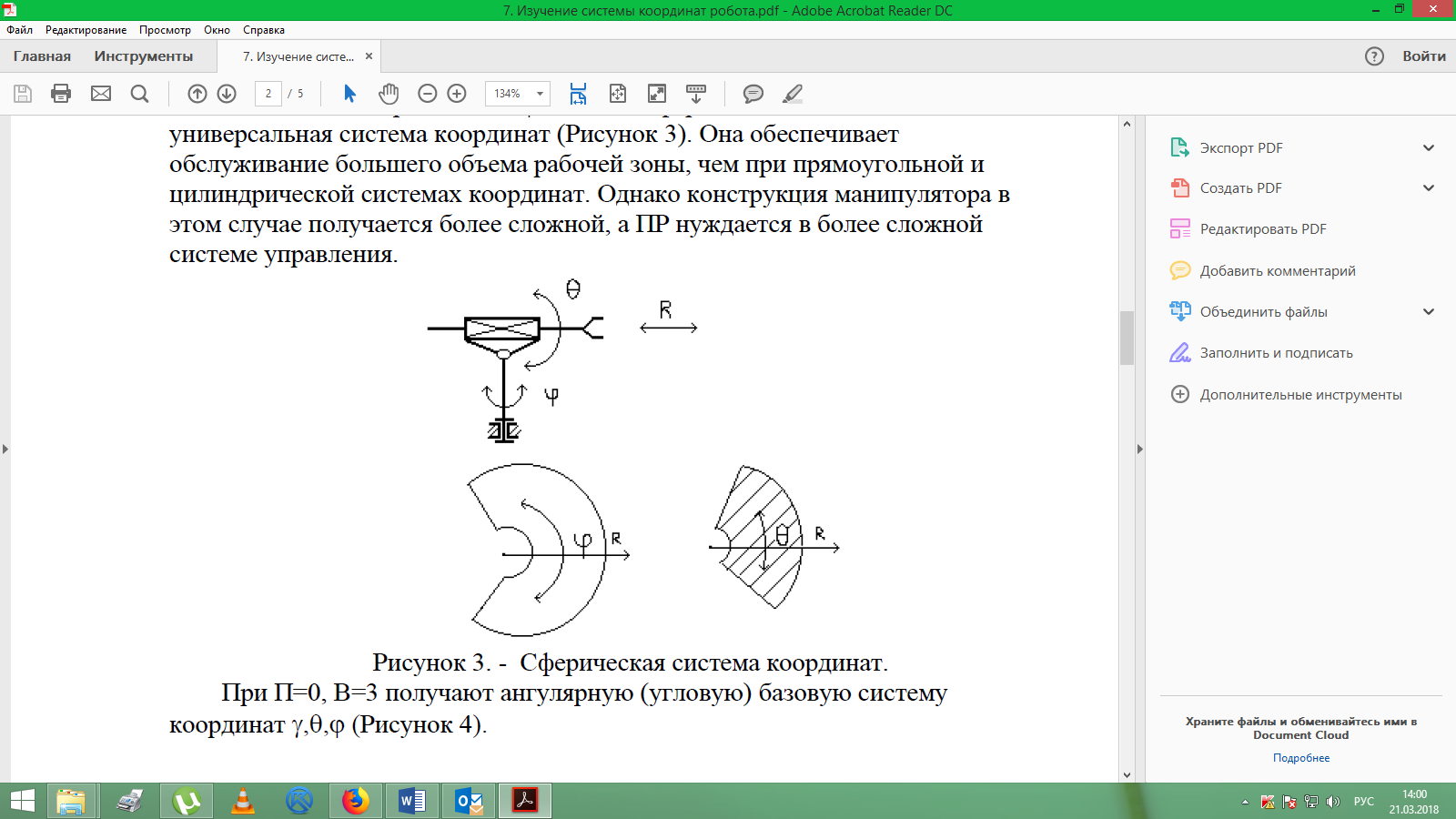 Рис. 5. Сферическая система координат При П=0, В=3 получают ангулярную (угловую) базовую систему координат φ, θ, ɣ (рис.6). 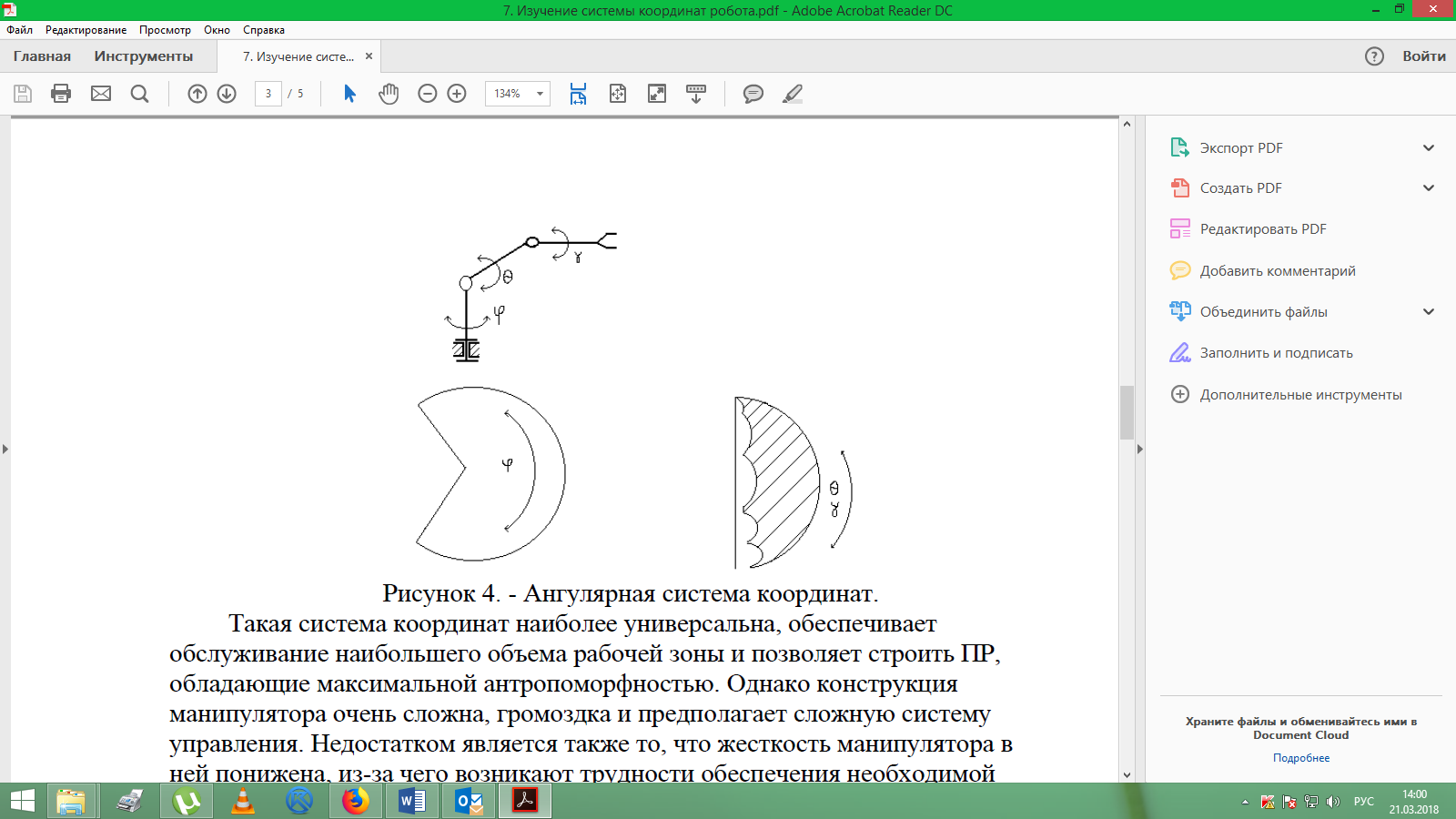 Рис.6. Ангулярная система координат Такая система координат наиболее универсальна, обеспечивает обслуживание наибольшего объема рабочей зоны и позволяет строить ПР, обладающие максимальной антропоморфностью. Анализ кинематических схем манипуляторов показывает две основные особенности: - оси кинематических пар расположены параллельно либо перпендикулярно друг другу, - звенья соединены в последовательную кинематическую цепь. Вместе с тем они имеют ряд существенных недостатков: - низкий показатель грузоподъемность/масса манипулятора, что обусловлено последовательной схемой соединения звеньев. - погрешности в перемещениях всех шарниров суммируются на концевой точке манипулятора. - относительно низкая жесткость манипуляционных роботов, так как упругое отклонение рабочего органа есть результат накопления деформаций по цепи по всем степеням подвижности робота. Робот Омега работает в цилиндрической системе координат. Направления движений робота указаны на рис.7. G X Y Z 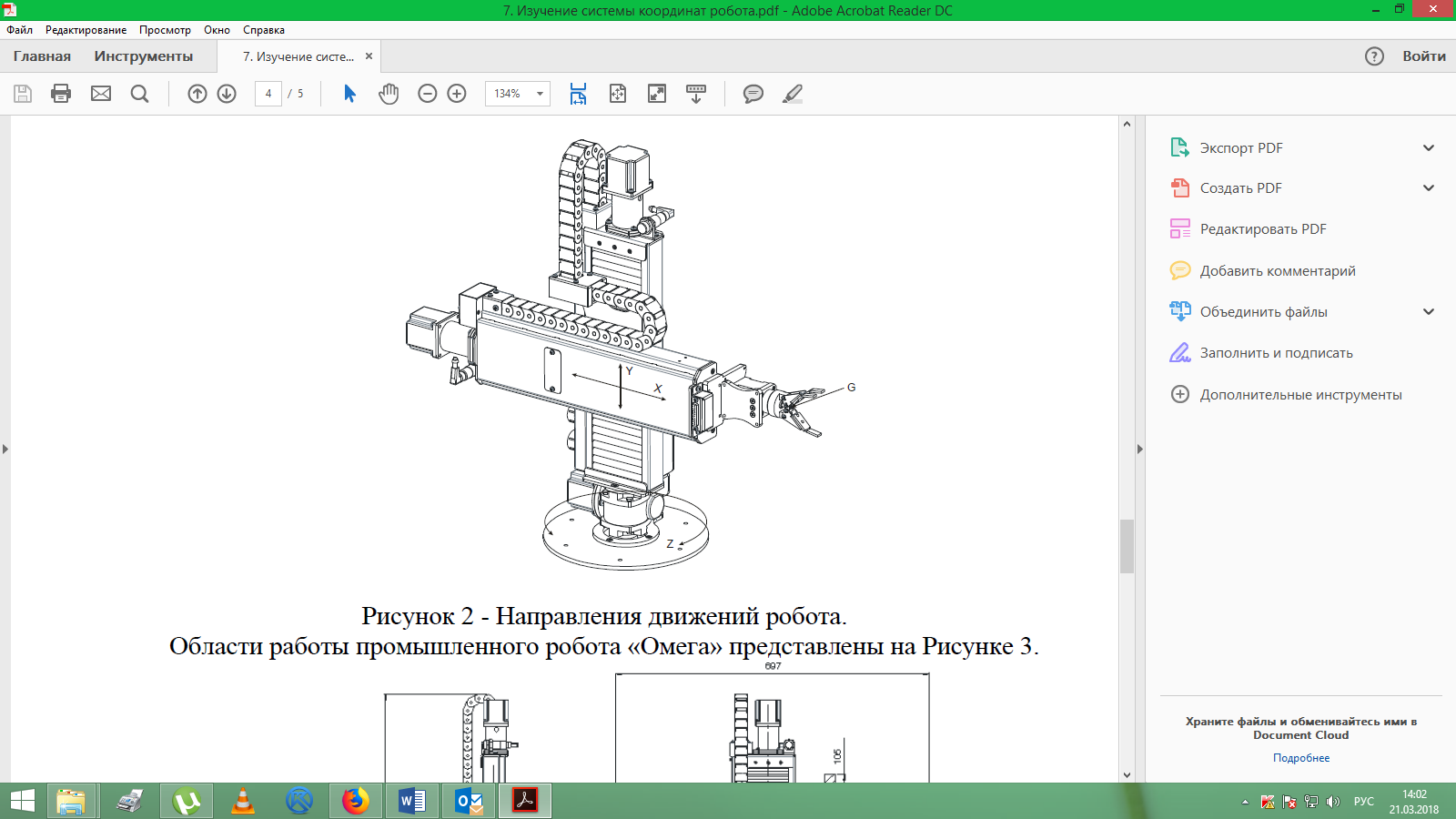 Рис. 7. Направления движений робота Области работы промышленного робота «Омега» представлены на рис.8. 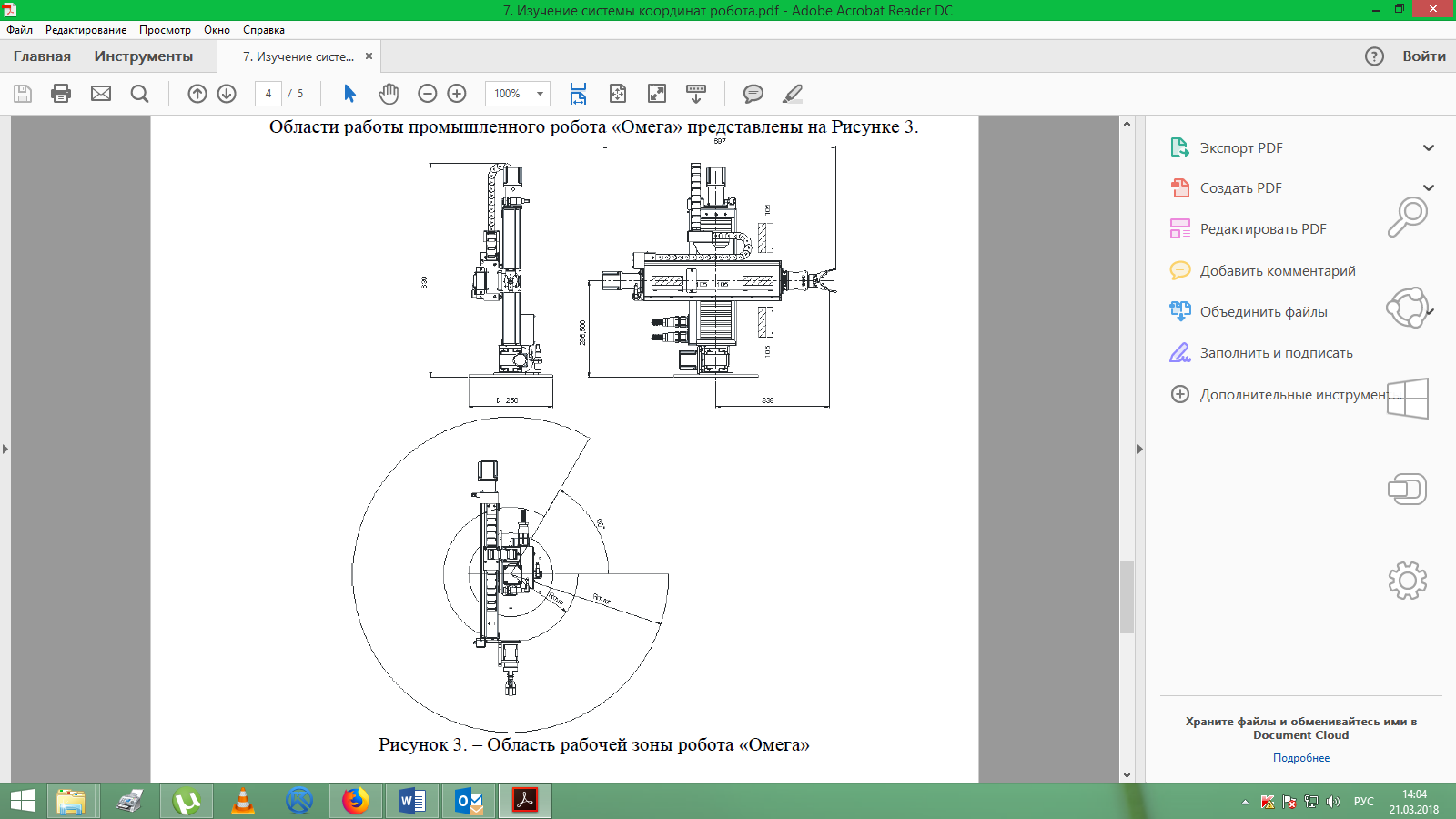 Рис.8. Область рабочей зоны робота «Омега» Контрольные вопросы 1.Как классифицируются кинематические пары? Разработана классификация кинематических структурных схем руки и манипуляторов, состоящая из пар: 1 – ВВВ, трех вращательных; 2 – ВВП, двух вращательных и одной поступательной; 3 – ПВП, ВПП, ППВ, двух поступательных и одной вращательной; 4 – ППП – трех поступательных. 2.Как определить степень подвижности манипулятора? Характер переносных степеней подвижности (поступательных и вращательных) определяет базовую систему координат манипулятора. 3.Каковы базовые системы координат манипулятора? Прямоугольная, цилиндрическая, сферическая и ангулярная системы координат. 4. Какие звенья входят в конструкцию манипулятора? 1 - поворотного модуль 2 и 3 - модули линейного перемещения 7 - захватное устройство или схват 4 - двигатель с редуктором и датчиком обратной связи 5 и 6 - датчиками обратной связи. 5. Что собой представляет структура манипулятора? Кинематические схемы роботов имеют определенные структуры кинематики рук и кисти, которые зависят от вида и последовательности расположения вращательных (В) и поступательных (П) кинематических пар. 6. Как классифицируются кинематические пары? (Повторяется) 7. Как определить степень подвижности манипулятора? (Повторяется) 8. В какой системе координат работает манипулятор, выполненный по схеме ВПП? Цилиндрическая 9. В какой системе координат работает манипулятор, выполненный по схеме ППП? Прямоугольная 10. В какой системе координат работает манипулятор, выполненный по схеме ВВВ? Ангулярная 11. Для чего нужно вычислять скорость движения звеньев робота? Для измерения времени перемещения для всех звеньев. 12. От чего зависит скорость движения звеньев робота? Ti – время в минутах, Li – перемещение звена (шаг). 13. Как шаг ходового винта влияет на скорость линейных перемещений? Чем больше шаг ходового винта, тем больше скорость. 14. Как влияет на скорость поворота робота передаточное отношение червячного редуктора? Очень широко червячная передача используется в конструкции захвата для роботаманипулятора. Также характерной особенностью червячной передачи является то, что она имеет наибольшее передаточное отношение. В обратном направлении вращение чаще всего блокируется, что даёт возможность использовать червячную передачу при больших нагрузках |