Исседование устойчивости нелинейных САУ. Лабораторная работа 5 Исследование устойчивости нелинейных сар. Вариант 4 студенты Проверил Дилигенская А. Н
 Скачать 1.92 Mb. Скачать 1.92 Mb.
|

Лабораторная работа №5 Исследование устойчивости нелинейных САР. Вариант №4 Выполнил: студенты Проверил: Дилигенская А.Н., Левин И.С. Самара, 2022 Цель работыИсследование устойчивости нелинейных САР. ЗаданиеЗадание 11) Смоделировать линейную и нелинейную САР с номинальным коэффициентом П-регулятора  . При моделировании ДПТ с заслонкой в нелинейной модели САР использовать блок Integrator, настроенный с учетом ограничения выходного сигнала (угол поворота заслонки от . При моделировании ДПТ с заслонкой в нелинейной модели САР использовать блок Integrator, настроенный с учетом ограничения выходного сигнала (угол поворота заслонки от  до до  ) )2) Изучить поведение линейной и нелинейной моделей САР при запуске нагрева холодного барабана (задающее значение температуры установить равным  ). В этом случае в начале процесса значение сигнала рассогласования велико, нелинейная САР выходит на режим ограничения. Сравнить результаты работы линейной и нелинейной модели. Контролировать на осциллографе выходные сигналы систем и сигналы с выхода ИМ. Не забывать устанавливать подходящее время симулирования (дожидаться окончания переходного процесса). ). В этом случае в начале процесса значение сигнала рассогласования велико, нелинейная САР выходит на режим ограничения. Сравнить результаты работы линейной и нелинейной модели. Контролировать на осциллографе выходные сигналы систем и сигналы с выхода ИМ. Не забывать устанавливать подходящее время симулирования (дожидаться окончания переходного процесса). 3) После окончания переходного процесса подать приращение задания на  (запуск горячего барабана). (запуск горячего барабана).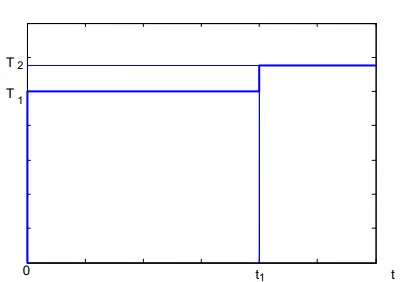 Рисунок 1- Приращение задания на (запуск горячего барабана)Для моделирования приращения входного воздействия  использовать блок Step, в котором в поле Step time установить время начала подачи приращения сигнала (момент использовать блок Step, в котором в поле Step time установить время начала подачи приращения сигнала (момент ) и значение приращения ) и значение приращения  . Значение не должно быть ранее момента окончания переходного процесса. Сравнить результаты работы линейной и нелинейной модели, сделать выводы. . Значение не должно быть ранее момента окончания переходного процесса. Сравнить результаты работы линейной и нелинейной модели, сделать выводы.4) Увеличить коэффициент П-регулятора до значения  , и повторить пункты 2), 3). , и повторить пункты 2), 3).Таблица 1 Исходные данные
Выполнение заданий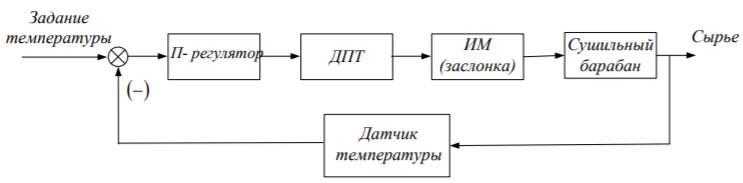 Рисунок 2 – Функциональная схема САР температуры в сушильном барабане Назначение САР: в сушильном барабане следует поддерживать температуру, задаваемую технологом, регулируя подачу газа путем изменения положения заслонки в газопроводе. В общих чертах работа САР осуществляется следующим образом. Датчик температуры подает на устройство сравнения напряжение, пропорциональное температуре в барабане, которое сравнивается с напряжением задания и разность поступает на П-регулятор 3 (усилитель). С П-регулятора напряжение подается на реверсивный двигатель постоянного тока (ДПТ), который поворачивает заслонку в пределах от 00 (закрыта) до 900 (полностью открыта), регулируя подачу газа. Увеличение задания (требуемой температуры) приводит к появлению рассогласования на входе П-регулятора, которое приводит к вращению вала ДПТ и открытию заслонки. В барабан поступает больше горючего газа, и температура там повышается. В результате рассогласование на выходе устройства сравнения устремляется к нулю, и температура выходит и поддерживается на требуемом уровне. Так САР работает в линейном режиме. Но если задать чрезмерно высокую требуемую температуру, то заслонка откроется полностью, но и максимальное поступление газа не позволит разогреть среду в барабане до требуемого значения. Как видно, максимальная температура в барабане ограничена уровнем подачи газа при полностью открытой заслонке. В этом и проявилась ее нелинейность: нельзя открыть заслонку более чем на 100 % и закрыть менее чем на 0 %. Выполнение задания 1Передаточная функция сушильного барабана:  Передаточную функцию датчика принять равной единице. Для моделирования ДПТ с заслонкой, помещенной в трубе подачи газа в нелинейной модели использовать нелинейный блок интегратор с ограничением, а в линейной модели использовать обычный линейный интегратор. Ввиду наличия в контуре интегратора, в линейном режиме САР является астатической, с астатизмом первого порядка. 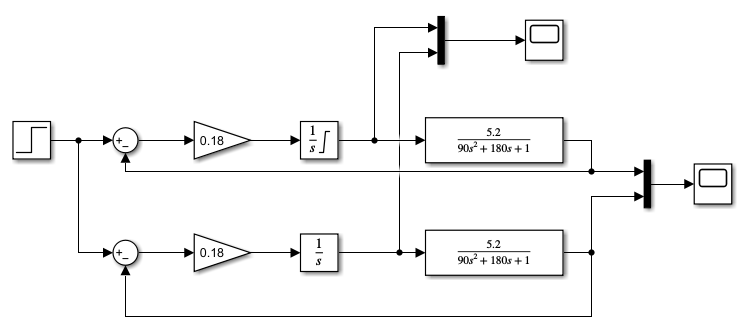 Рисунок 3 – Схема реализации задания 1 в MATLAB 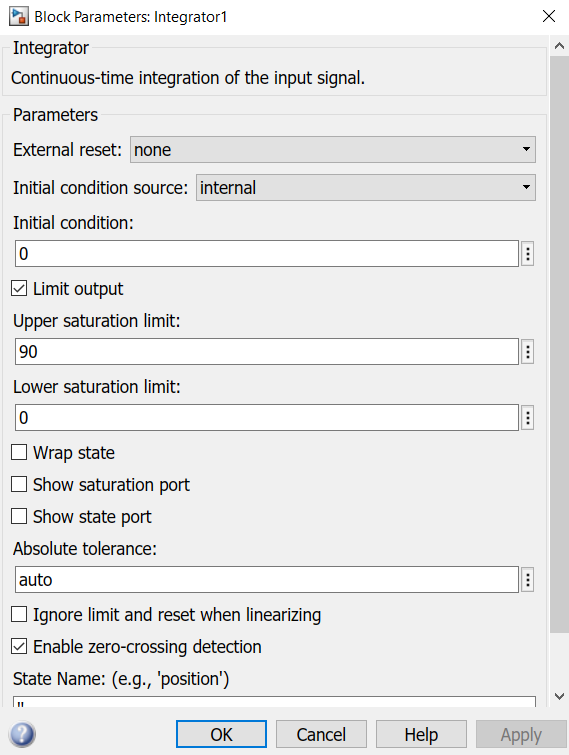 Рисунок 4 – Значения блока Integrator с ограничением Выполнение задания 2Поведение линейной и нелинейной модели САР при запуске нагрева холодного барабана. 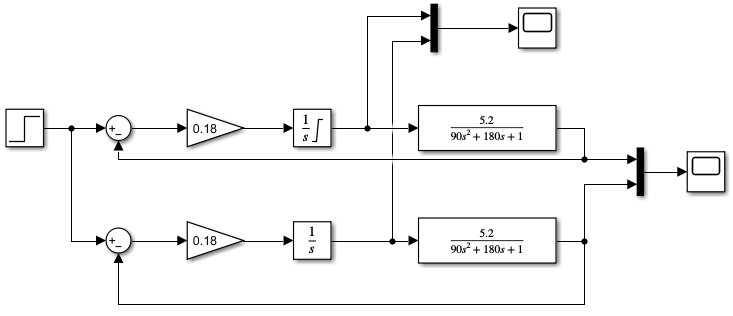 Рисунок 5 – Схема реализации задания 2 в MATLAB 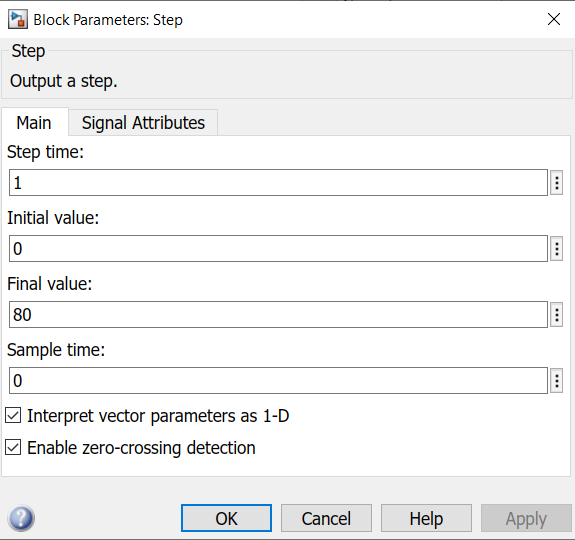 Рисунок 6 – Настройка блока Step 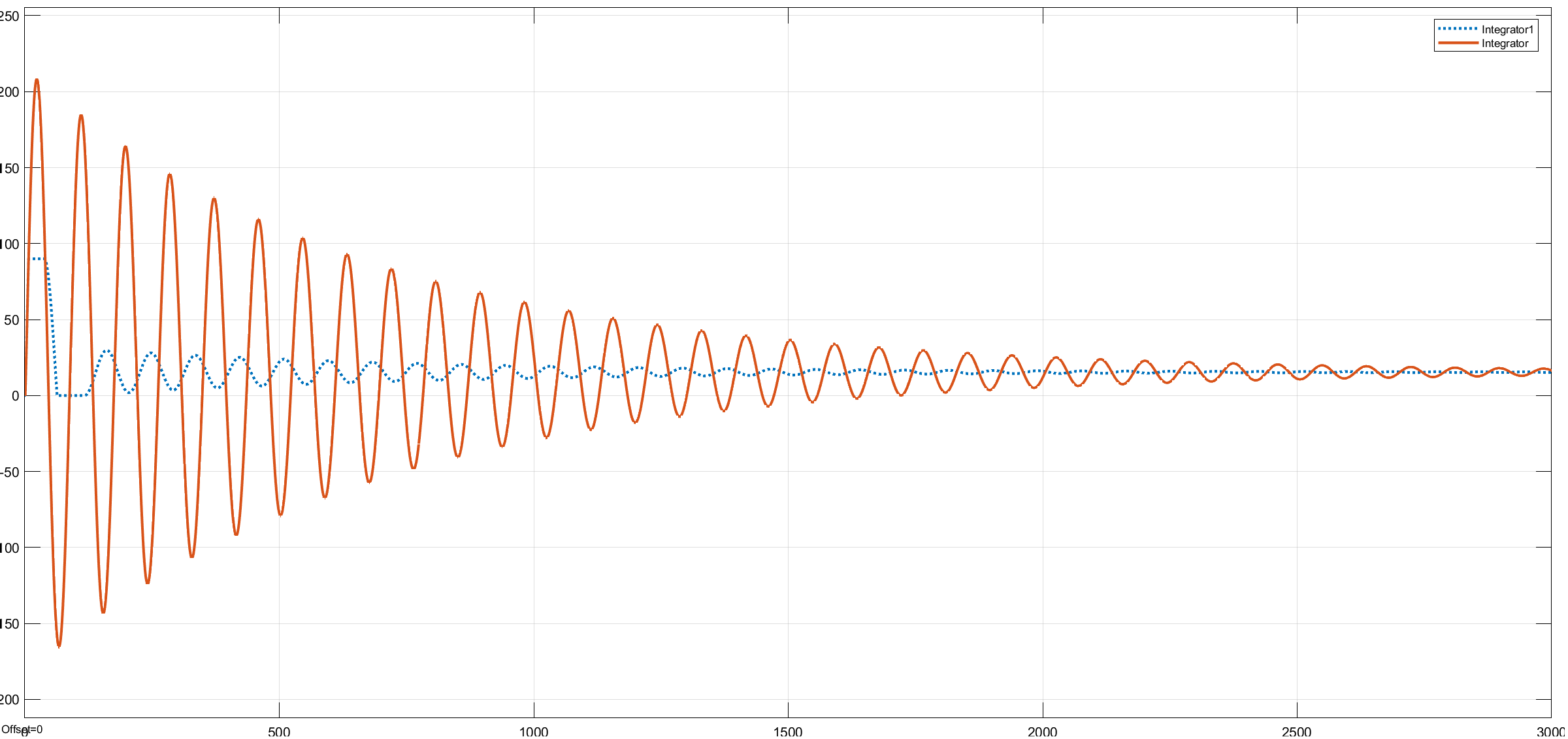 Рисунок 7 – График выходного сигнала исполнительного механизма (ИМ) 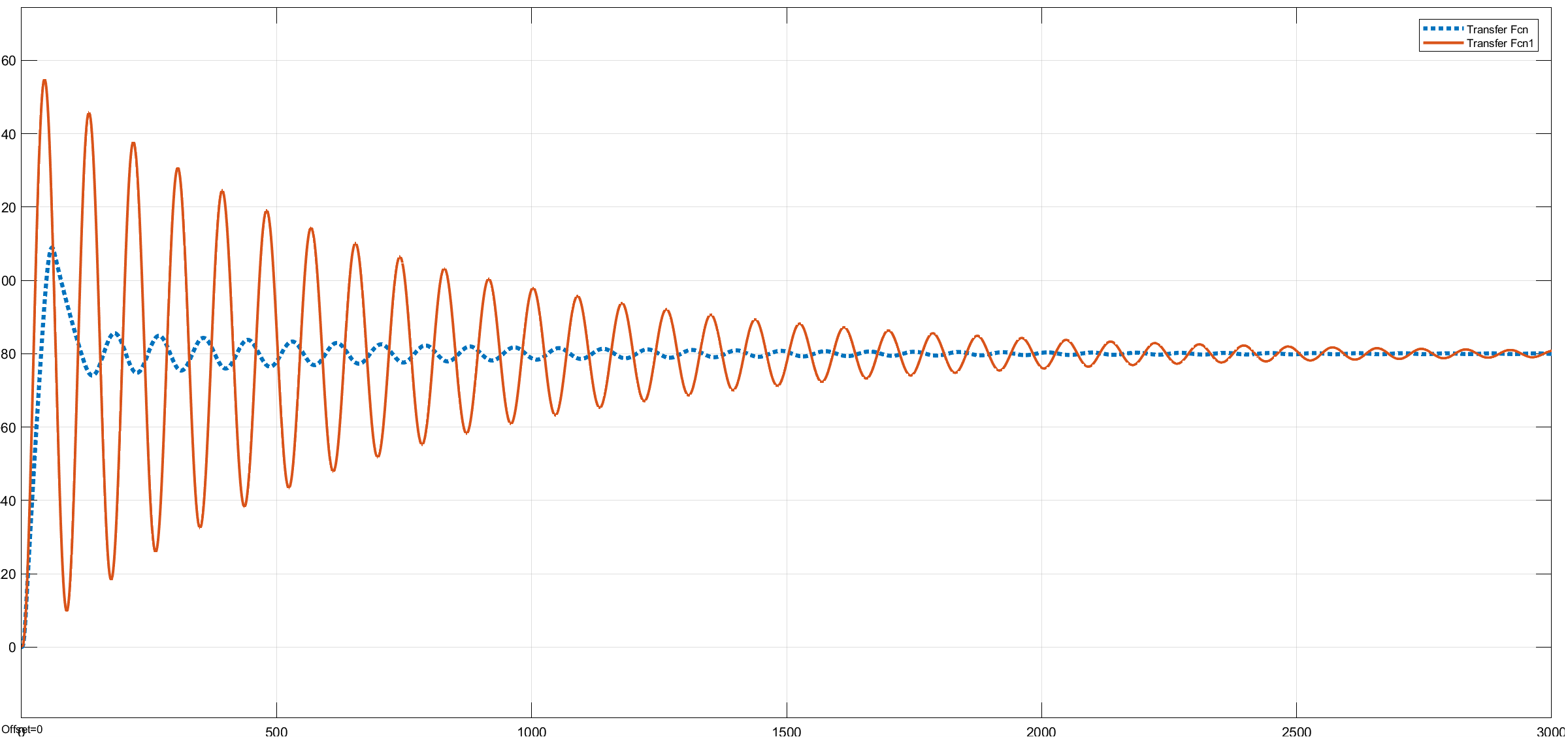 Рисунок 8 – График выходного сигнала системы Выполнение задания 3Поведение линейной и нелинейной модели САР при запуске горячего барабана. 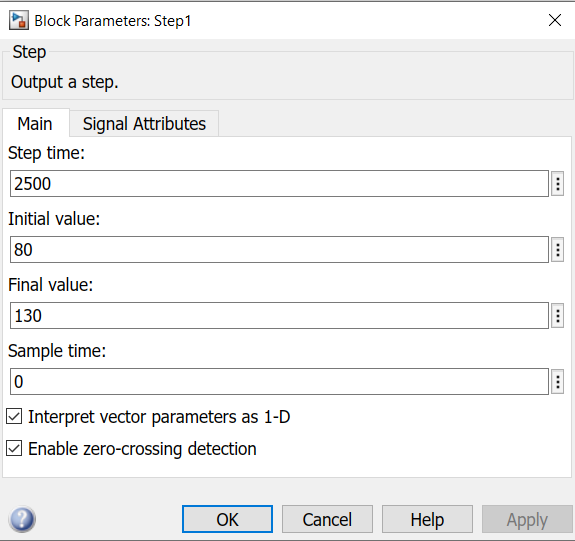 Рисунок 9 – Настройка блока Step 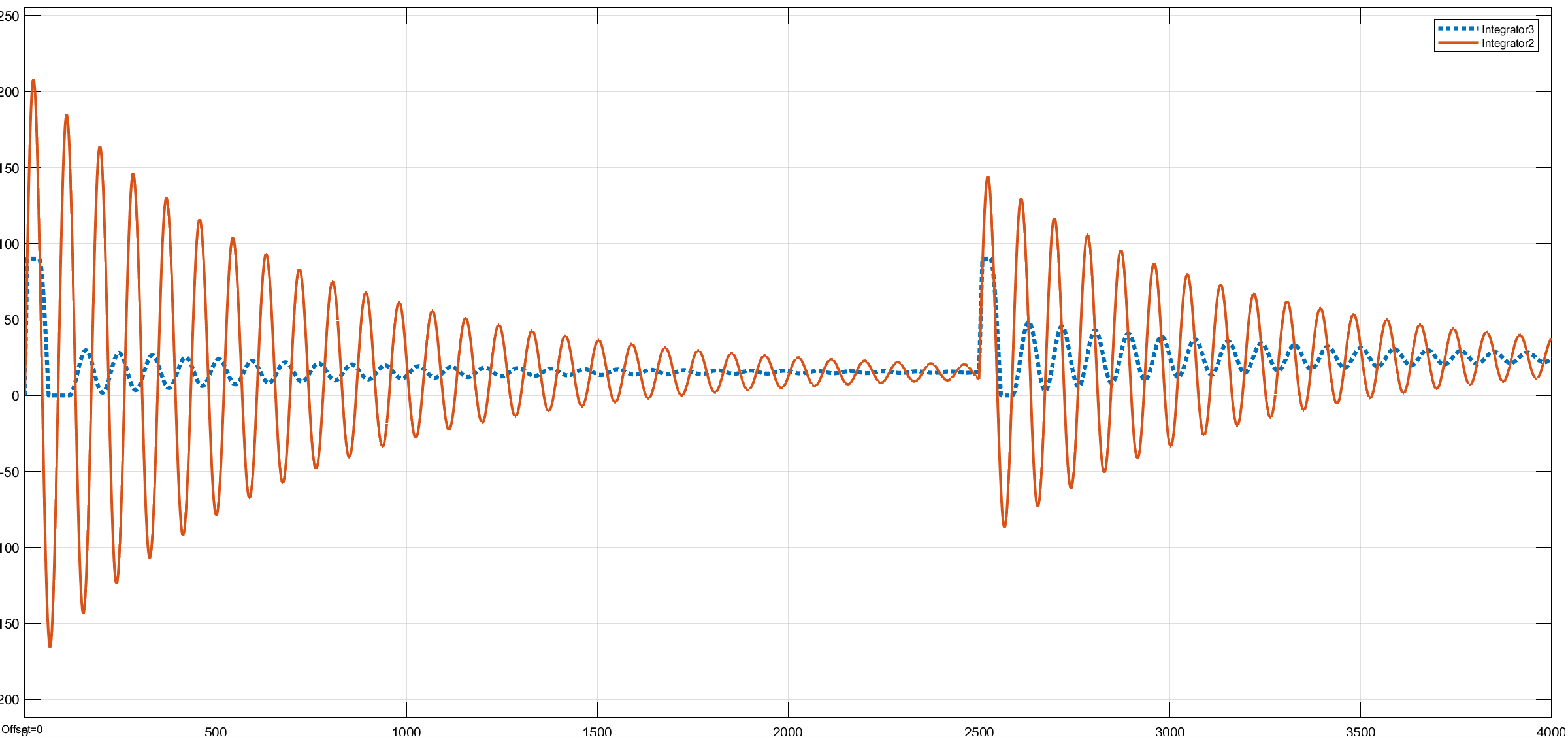 Рисунок 10 – График выходного сигнала исполнительного механизма (ИМ) 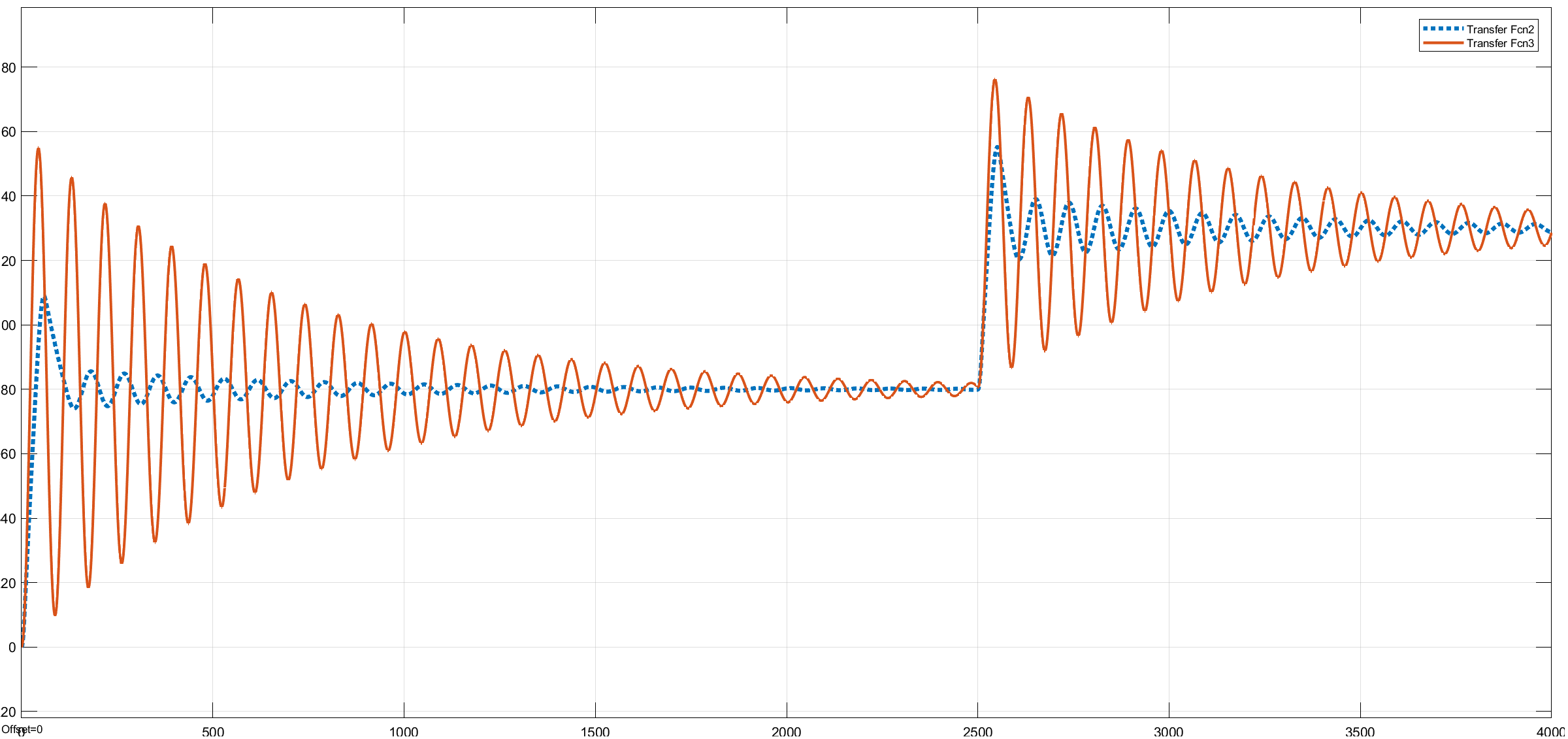 Рисунок 11 – График выходного сигнала системы Выполнение задания 4Поведение линейной и нелинейной модели САР при запуске нагрева холодного барабана при увеличении коэффициента П-регулятора. 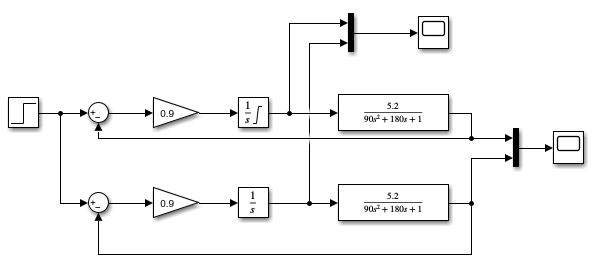 Рисунок 12 – Схема реализации задания 4 в MATLAB 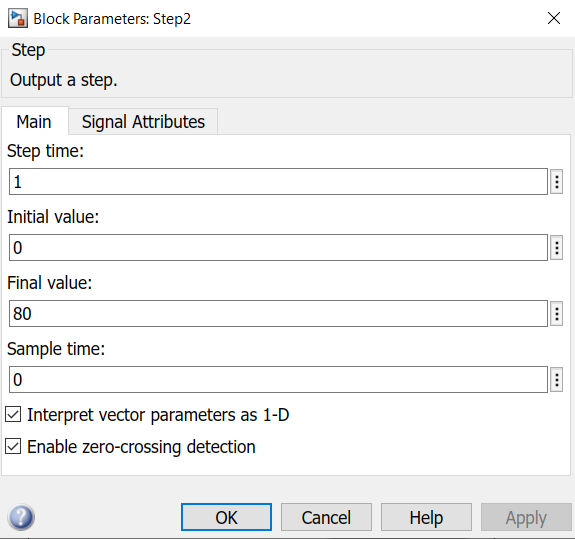 Рисунок 13 – Настройка блока Step 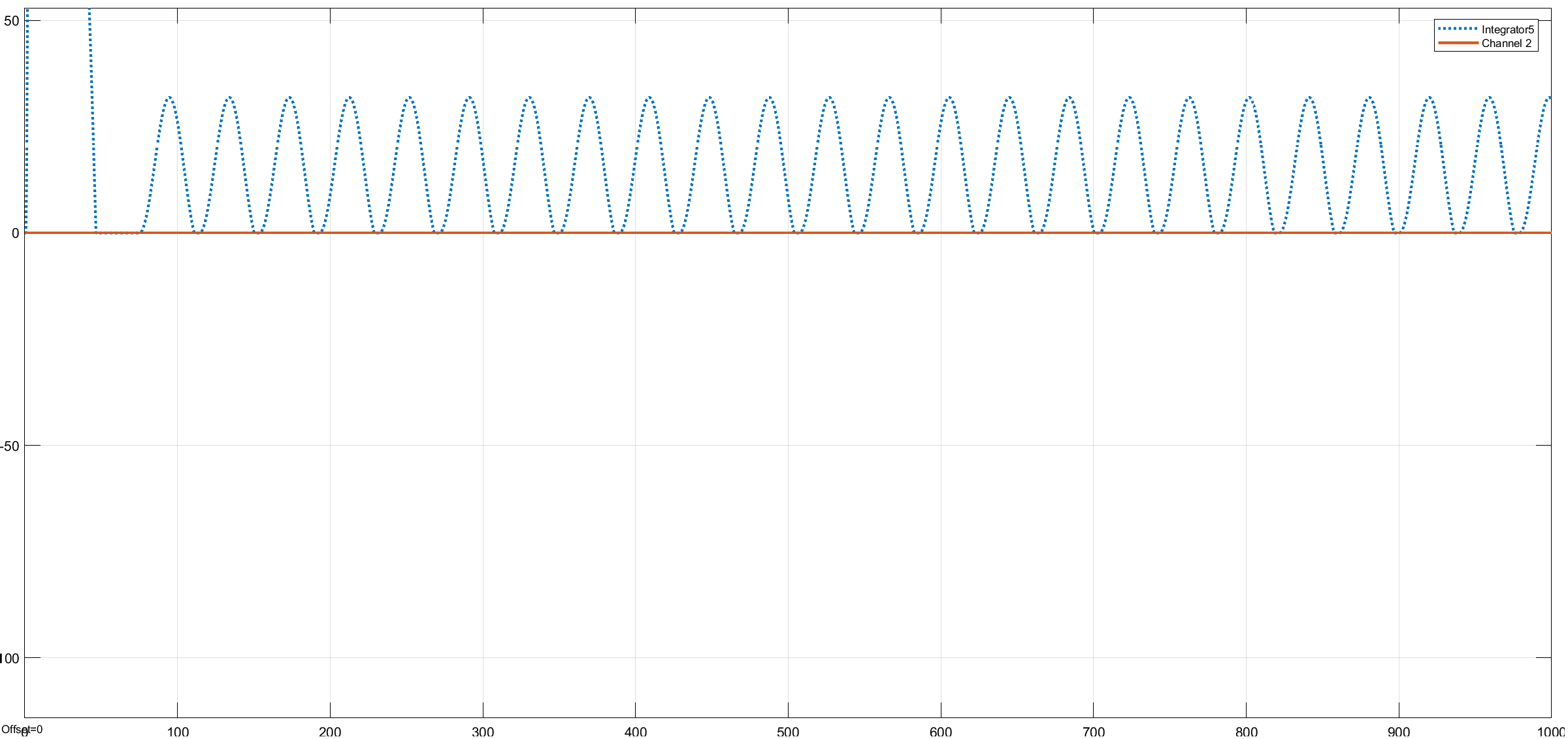 Рисунок 14 – График выходного сигнала нелинейной части исполнительного механизма (ИМ) 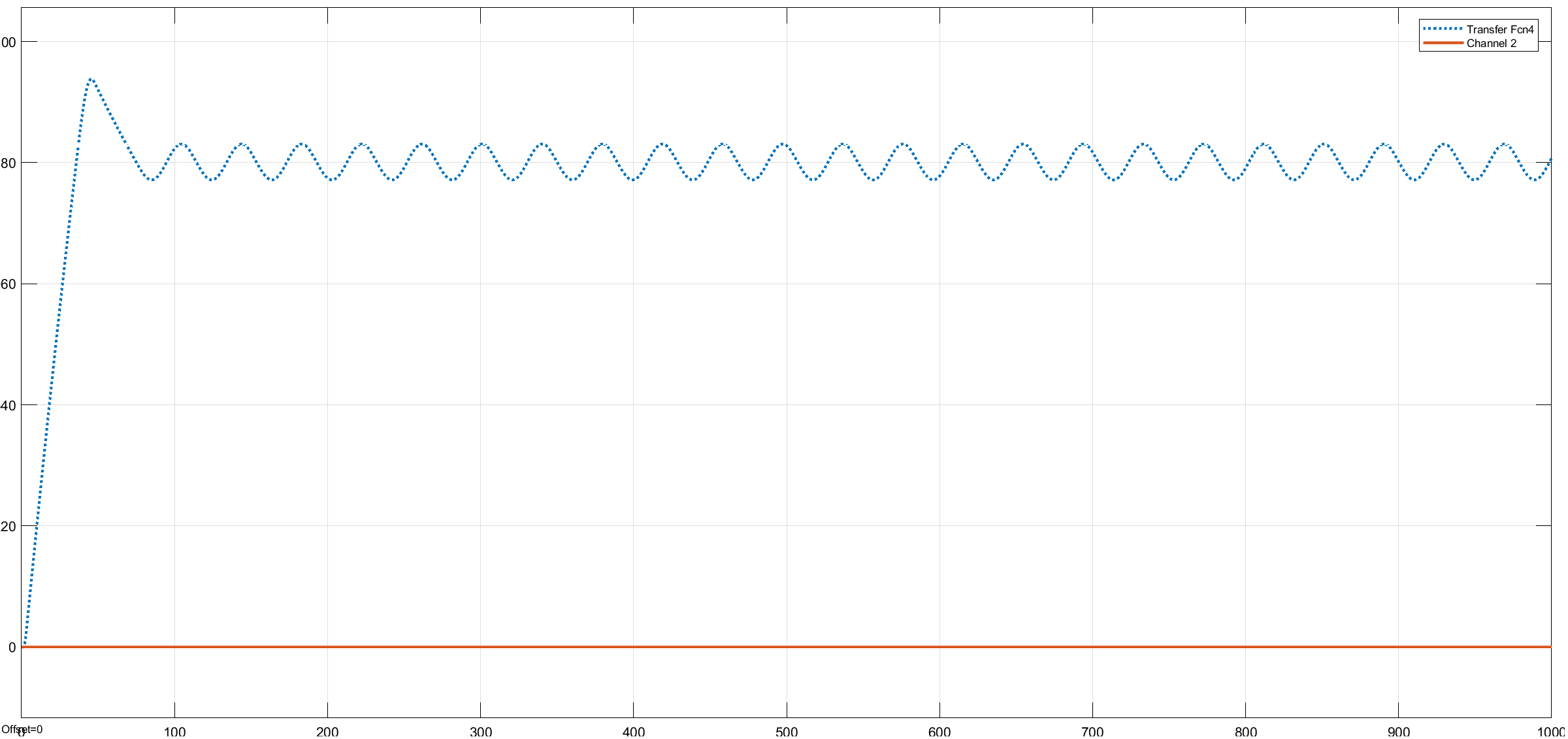 Рисунок 15 – График выходного сигнала нелинейной части системы 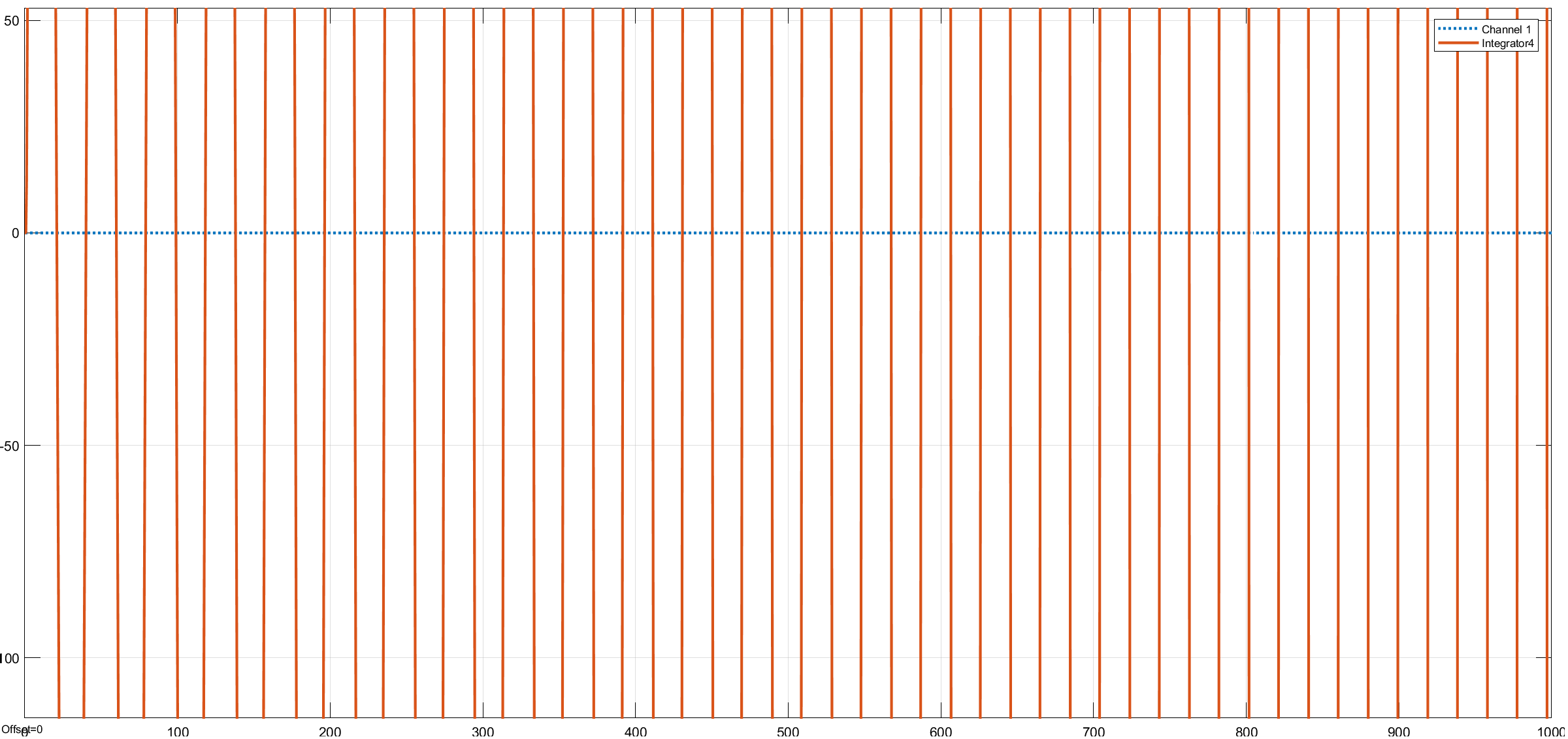 Рисунок 16 – График выходного сигнала линейной части исполнительного механизма (ИМ) 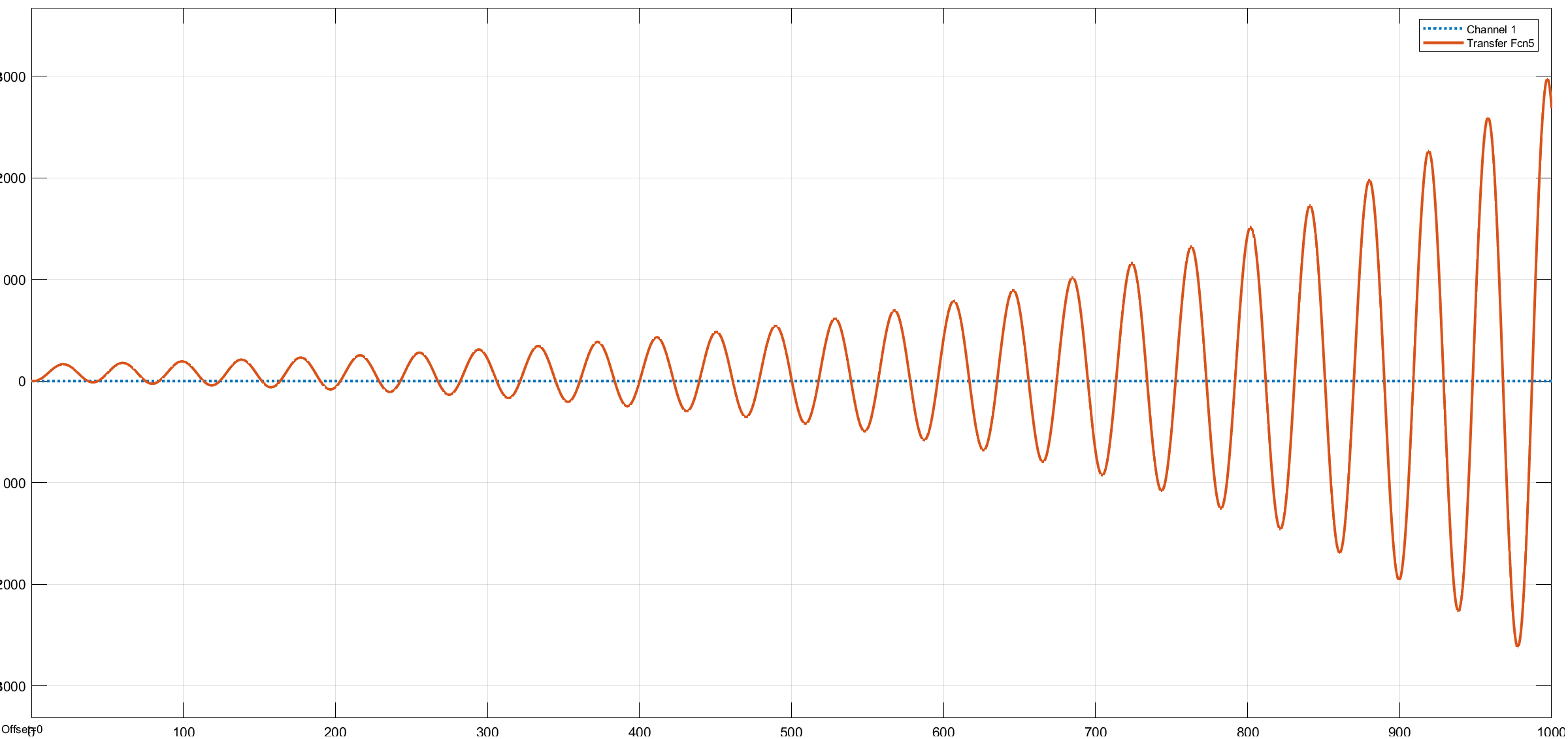 Рисунок 17 – График выходного сигнала линейной части системы 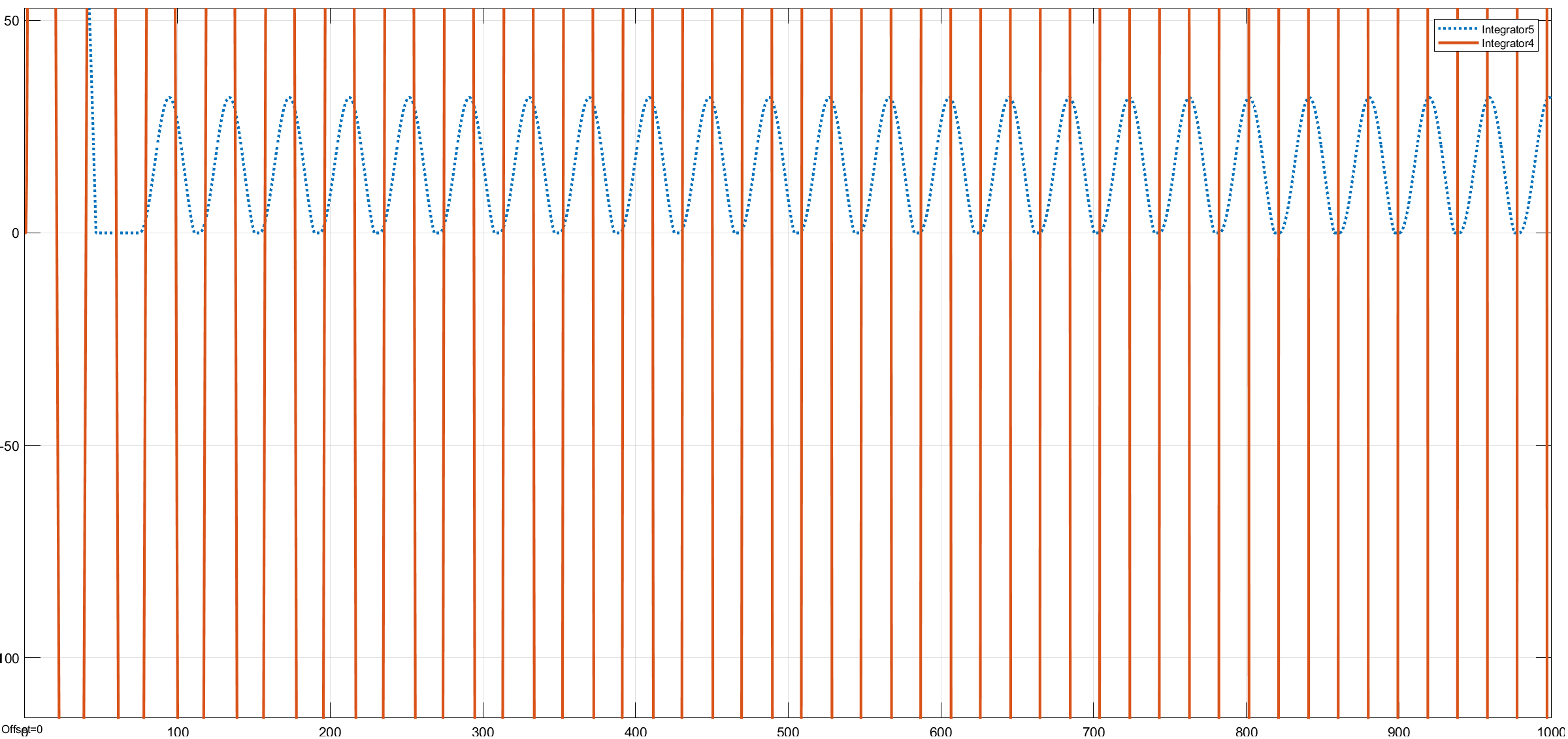 Рисунок 18 – График выходного сигнала исполнительного механизма (ИМ) 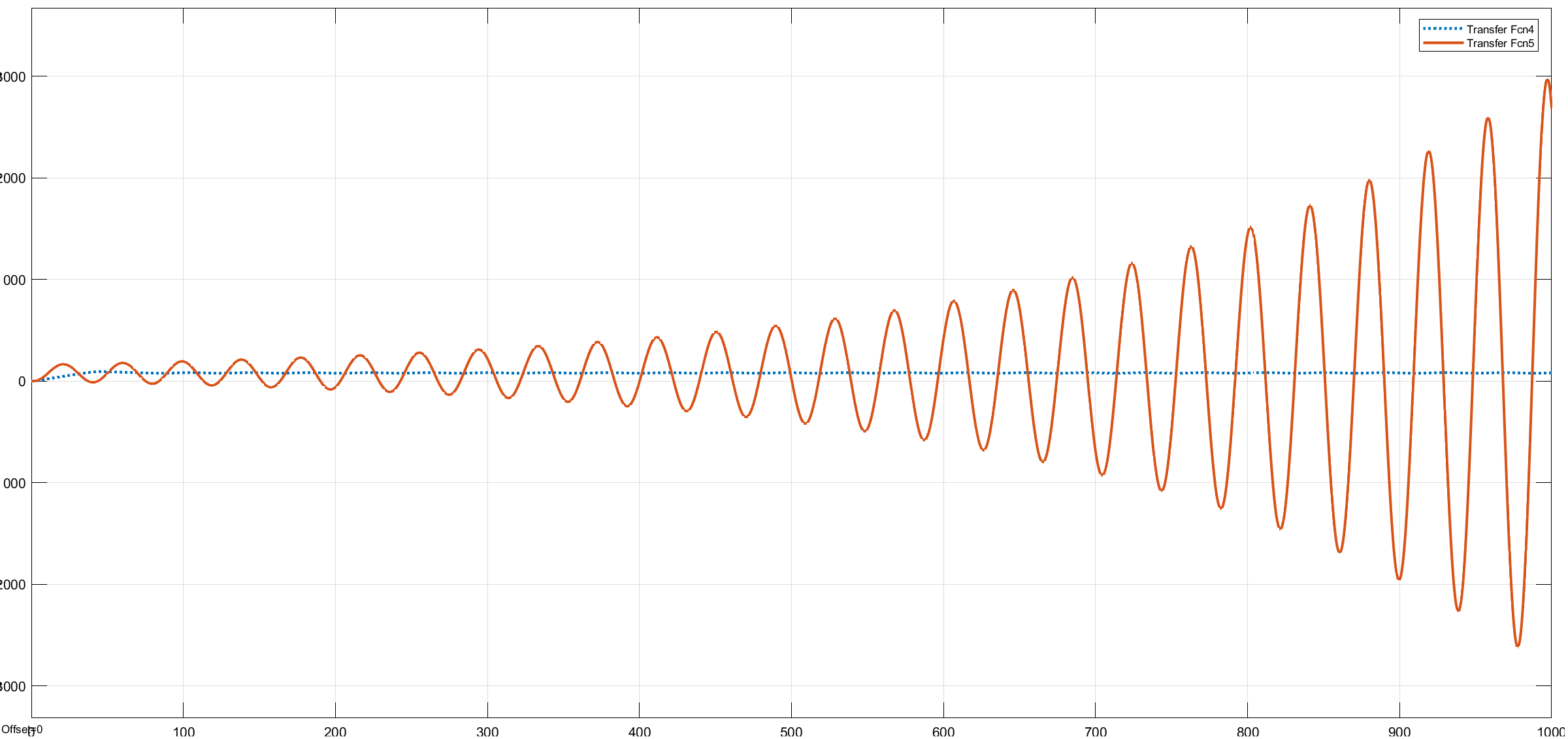 Рисунок 19 – График выходного сигнала системы Поведение линейной и нелинейной модели САР при запуске горячего барабана при увеличении коэффициента П-регулятора. 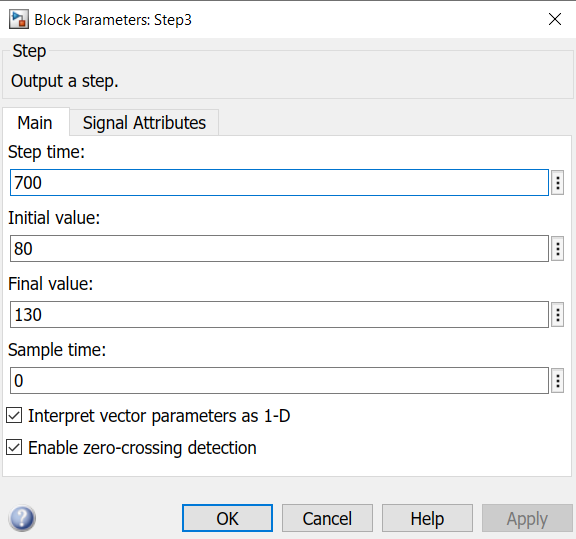 Рисунок 20 – Настройка блока Step 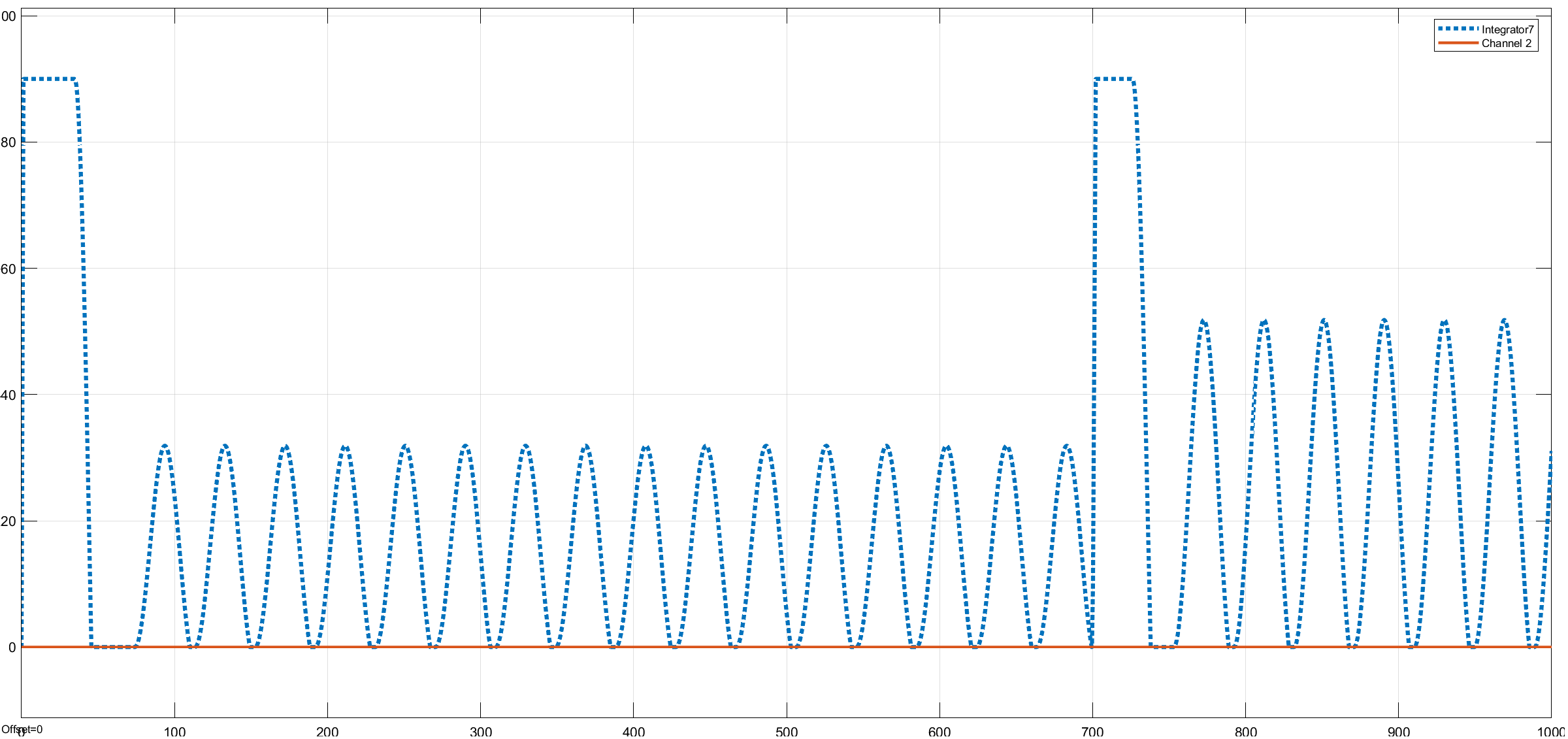 Рисунок 21 – График выходного сигнала нелинейной части исполнительного механизма (ИМ) 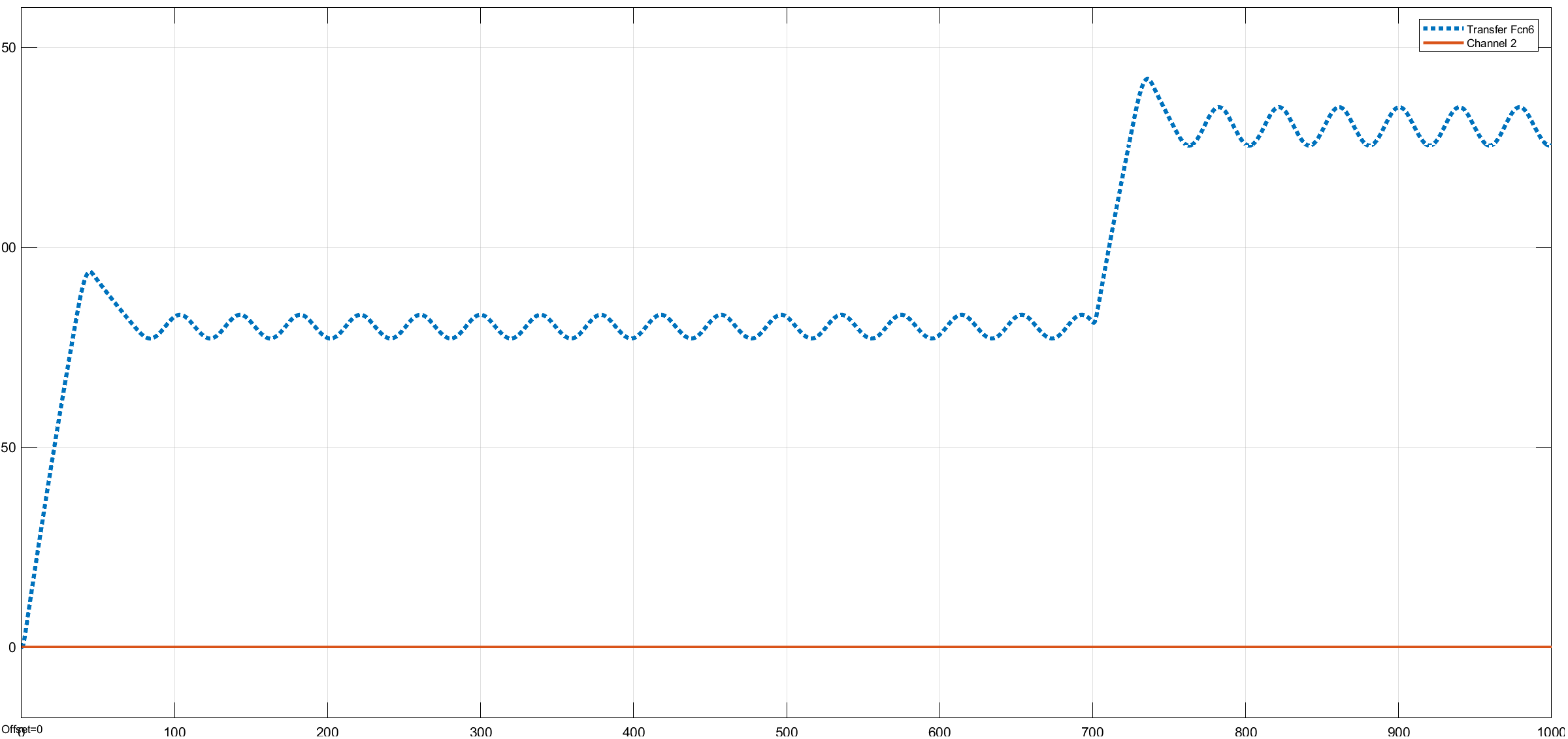 Рисунок 22 – График выходного сигнала нелинейной части системы 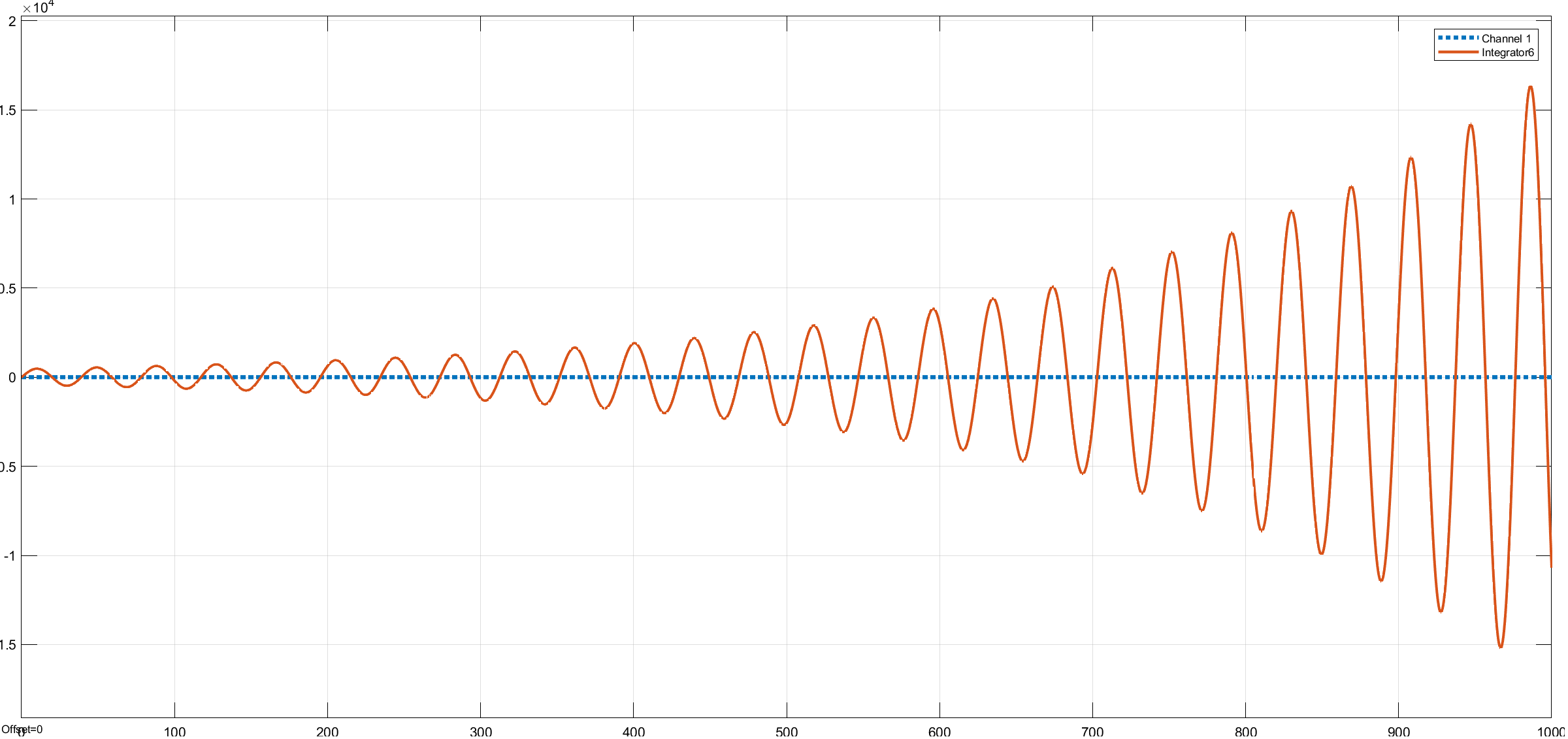 Рисунок 23 – График выходного сигнала линейной части исполнительного механизма (ИМ) 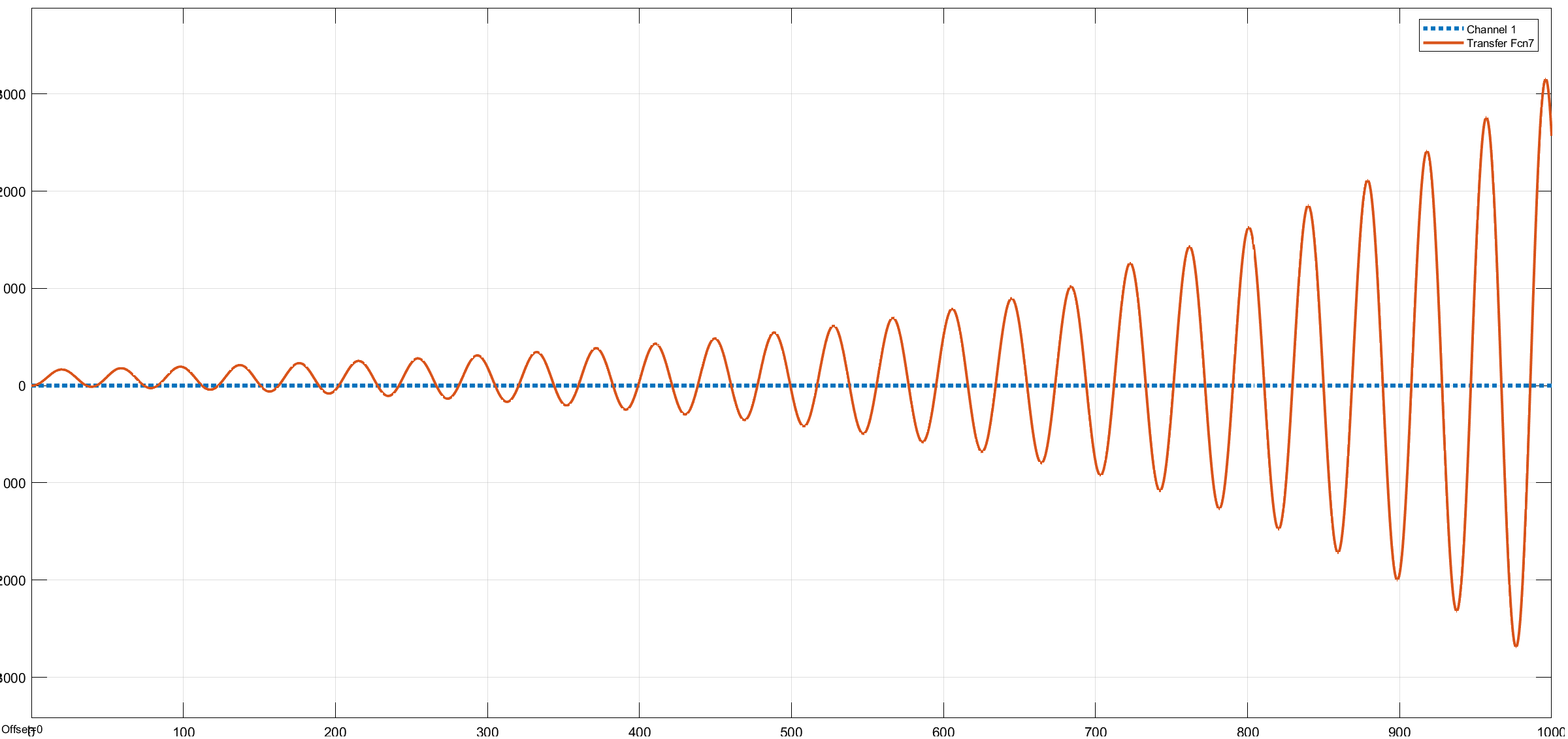 Рисунок 24 – График выходного сигнала линейной части системы 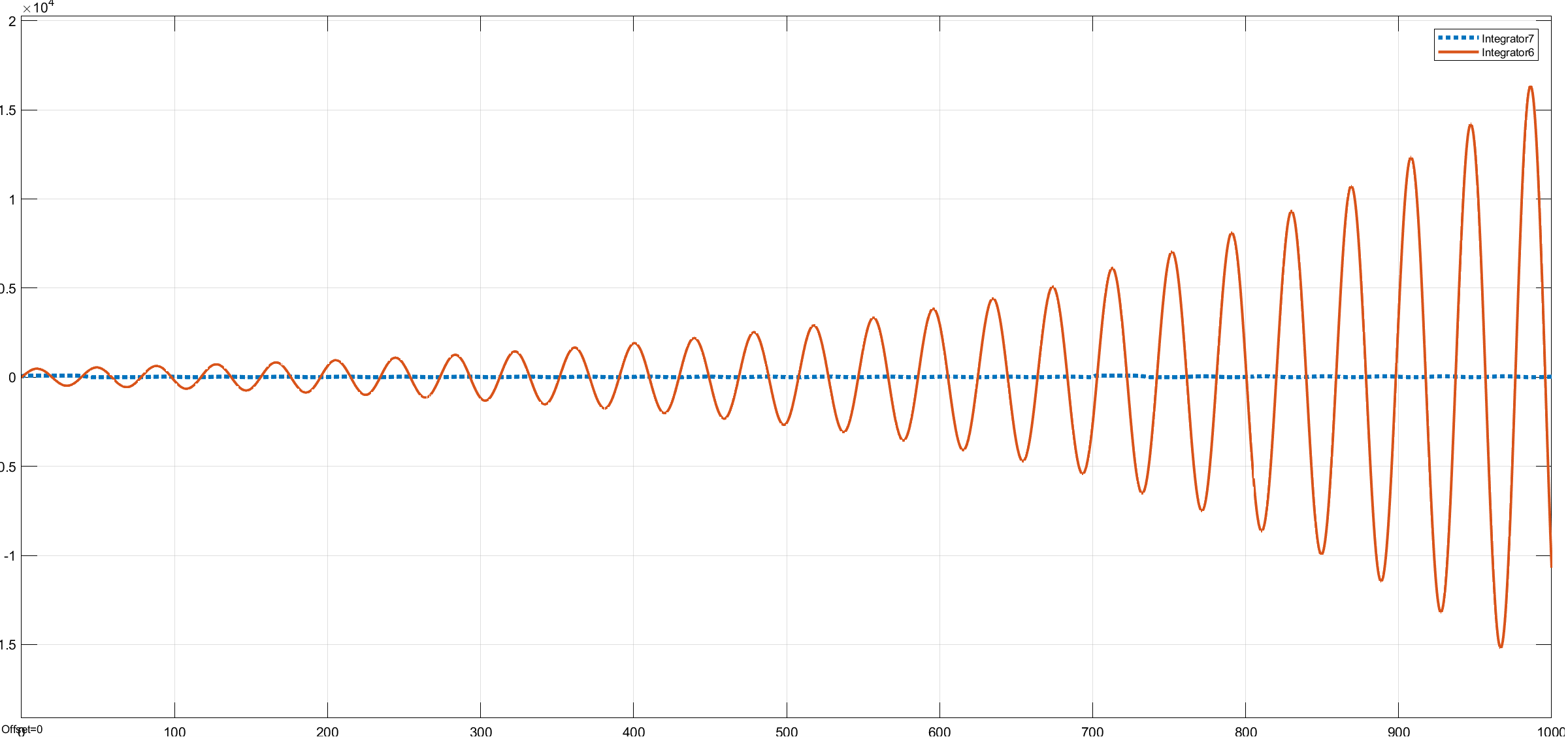 Рисунок 25 – График выходного сигнала исполнительного механизма (ИМ) 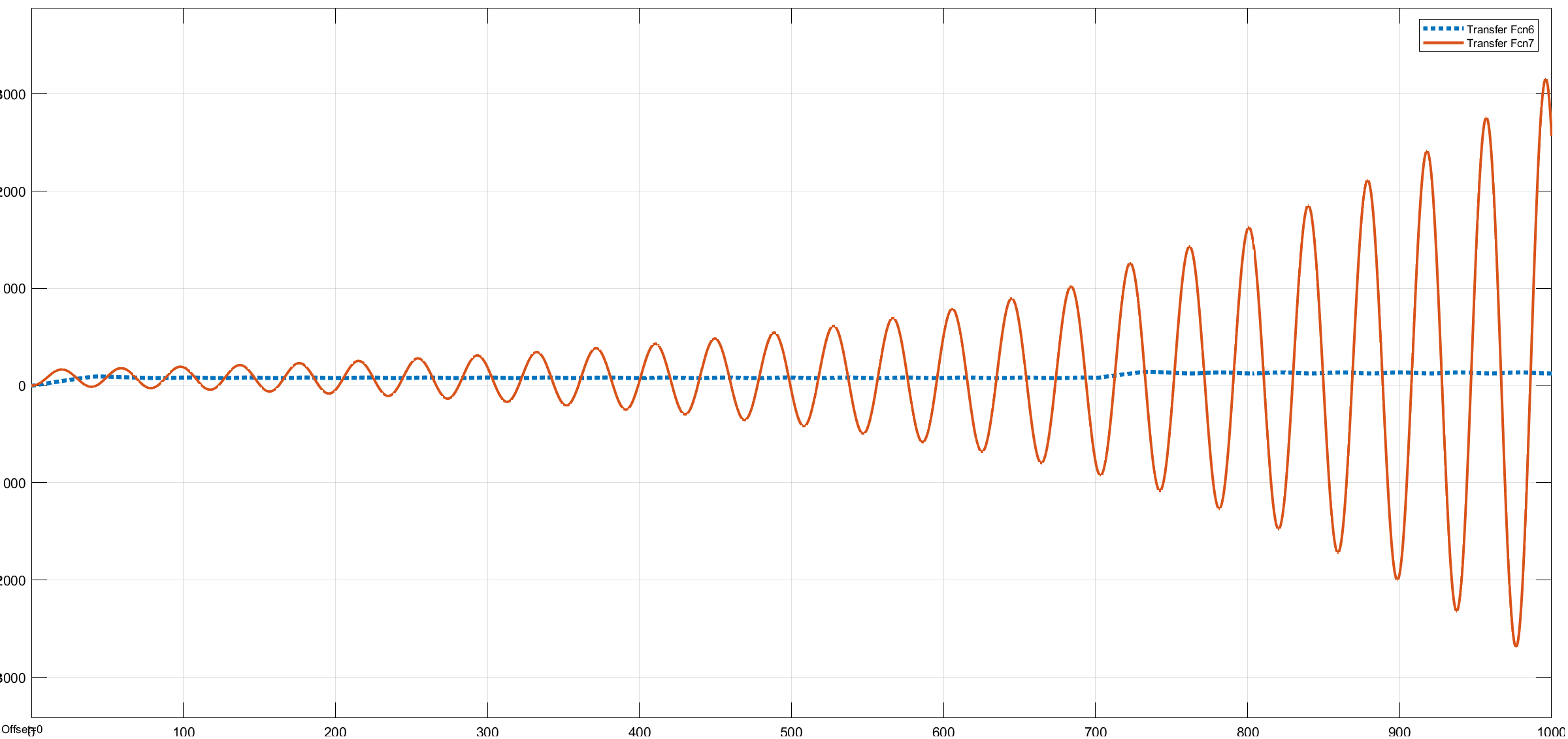 Рисунок 26 – График выходного сигнала системы Выполнение задания 5Дополнительное задание: подобрать такие параметры , при котором в начале переходного процесса графики выходного сигнала будут различными, а при подаче приращения входного сигнала – примерно похожими.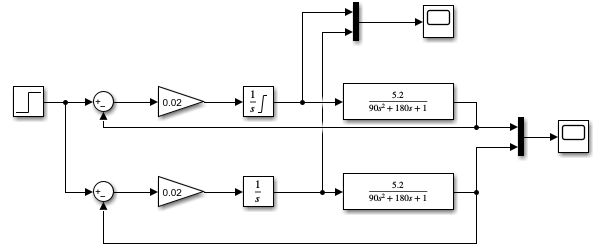 Рисунок 27 – Схема реализации задания 5 (дополнительное) в MATLAB 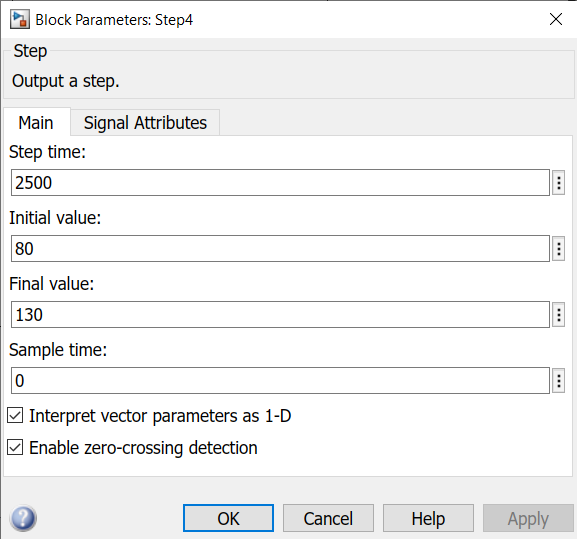 Рисунок 28 – Настройка блока Step 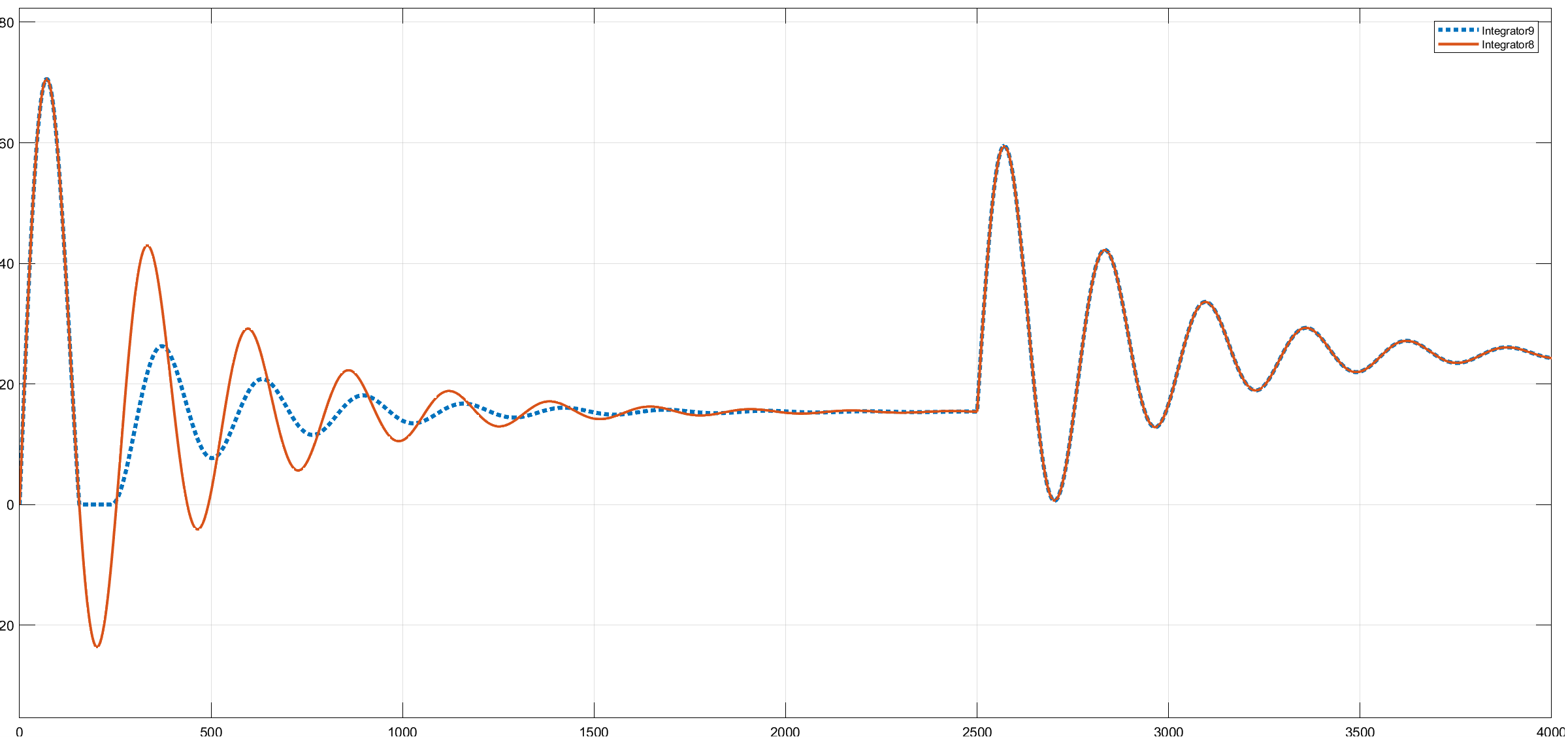 Рисунок 29 – График выходного сигнала нелинейной части исполнительного механизма (ИМ) 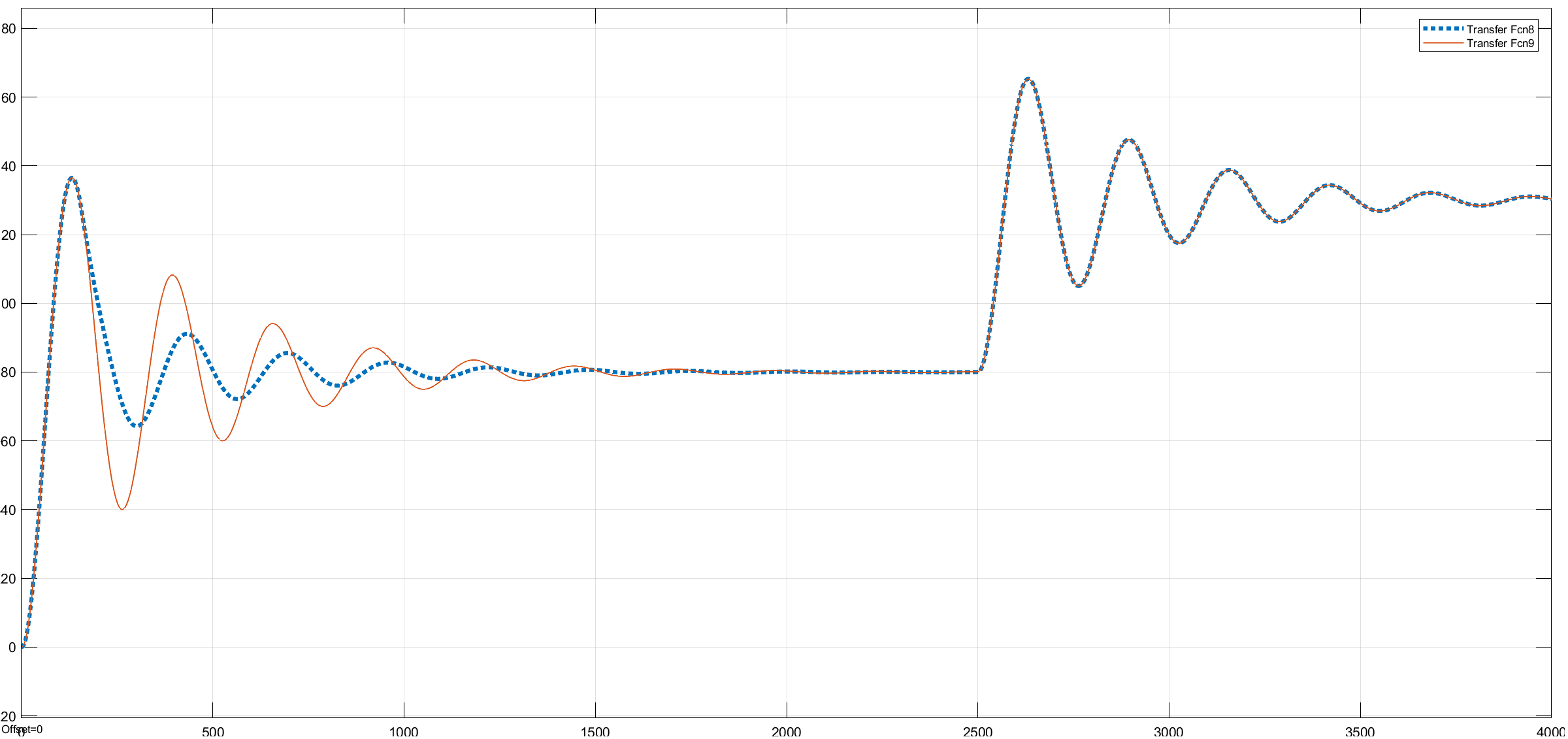 Рисунок 30 – График выходного сигнала нелинейной части системы ВыводТаким образом, были исследованы устойчивости нелинейных САР. |



