лаба 5. Лабораторная работа 5 изучение основного знака динамики вращательного движения студент гр. Игф 5121 Андреев Никита Андреевич
 Скачать 95.83 Kb. Скачать 95.83 Kb.
|

|
Федеральное государственное образовательное учреждение высшего образования «Чувашский государственный университет им. И. Н. Ульянова» Историко- географический факультет Лабораторная работа №5 ИЗУЧЕНИЕ ОСНОВНОГО ЗНАКА ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ Выполнила: студент гр. ИГФ 51-21 Андреев Никита Андреевич Принял: доц. к. г. н. Сорокин Г. г. Чебоксары 2022 1. Цель. Экспериментально проверить основной закон динамики вращательного движения. Определить момент инерции маятника Обербека без цилиндров. 2. Схематический рисунок установки. 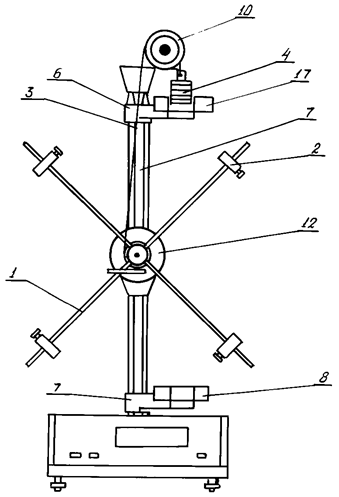 Рис.1. Устройство маятника Обербека 1 – взаимно перпенди — кулярные стержни 2 – цилиндры 3 – тонкая нить 4 – груз 5 – электромагнит 6 – подвижный кронштейн 7 – шкала 8 – фотоэлектрический датчик 10 – блок 12 — шкив 3. Расчётные формулы.  (1), (1),Где JЭ – экспериментальный момент инерции маятника, R02 – радиус шкива, M – масса спускающегося груза, T – время его движения, H – путь, пройденный грузом. Где — угловая скорость вращения маятника. Где M – момент силы натяжения нити.  (4), (4),Где JИз – момент инерции маятника с цилиндрами, J0 – момент инерции без цилиндров. Где MЦ – масса цилиндра, D – расстояние от оси врещения до центра масс цилиндра, L – его длина, R1 И R2 – внутренний и внешний радиусы. M — MТр = JE (6), Где M – момент сил, действующих со стороны груза, MТр – момент сил трения. Также использовались формулы, применяемые в методе наименьших квадратов как для прямо пропорциональной, так и для линейной зависимости. Таблица 1 Результаты измерений и расчётов для определения E, М, Jo
Результаты измерений и расчётов для исследования зависимости момента инерции системы от положения цилиндров
5. Контрольный расчёт. Сначала подставляем имеющиеся данные в формулу (1) и получаем значения момента инерции маятника без цилиндров, которые занесены в таблицу 1:    Затем строим график зависимости = F (M), и, применяя метод наименьших квадратов, получаем I=1/a=3.93·10-3 кг·м2; этот результат соответствует данным, полученным выше. Момент сил трения вычислить невозможно, так как он меньше той точности, с которой проводились измерения и расчёты. В результате все значащие цифры получаемых значений MТр стоят в разрядах, которые следует отбросить исходя из метода подсчёта цифр. Например: Значит, в нашей модели силы трения отсутствуют.      Вывод. В результате опыта были определены момент инерции маятника Обербека без цилиндров, момент инерции цилиндров, а также суммарный момент инерции системы. Погрешности, присутствовавшие при расчётах, по-видимому вызваны человеческим фактором и, возможно, погрешностями при определении параметра h, так как точность определения времени и массы была очень высока, а силы трения в системе были незначительны (об этом подробнее сказано в п.5). |