Лаб 1 Симаков Рычков. Лабораторная работа по дисциплине Динамика полета воздушных и космических ла на тему Исследование системы улучшения устойчивости и управляемости пд. Демпфер тангажа
 Скачать 417.29 Kb. Скачать 417.29 Kb.
|

 ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ (национальный исследовательский университет)» _____________________________________________________________________________
Лабораторная работа по дисциплине «Динамика полета воздушных и космических ЛА» на тему: «Исследование системы улучшения устойчивости и управляемости ПД. Демпфер тангажа» Выполнили: студенты гр.М30-326Б-19 Симаков Алексей Рычков Алексей Принял: доцент кафедры 301 ______________ П.В. Мулин. Москва – 2022 Исследование продольного короткопериодического движения самолета Уравнения короткопериодического движения самолета с учетом действия вертикальной составляющей ветровых возмущений имеют вид:       Передаточные функции ЛА     Достаточные условия устойчивости:  – выполняется всегда – выполняется всегда – ЛА называется устойчивым по перегрузке – ЛА называется устойчивым по перегрузке – ЛА называется неустойчивым по перегрузке – ЛА называется неустойчивым по перегрузке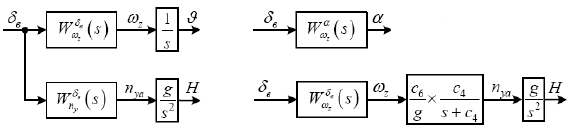 Рисунок 1-2. Структурные схемы продольного короткопериодического движения ЛА Постановка задачи исследования: Создать схему имитационного моделирования короткопериодического движения самолета в среде MATLAB-SIMULINK на основании рис.1,2. Отобразить схему в отчете Построить графики реакции на единичное ступенчатое воздействие  по координатам по координатам  для двух случаев: для двух случаев:  Исходные данные
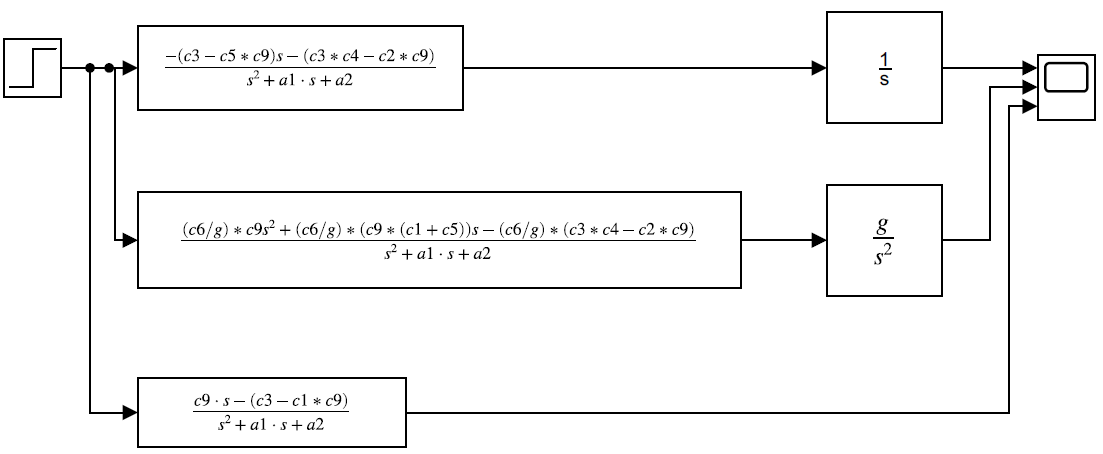 Рисунок 3. Математическая модель для продольного короткопериодического движения ЛА 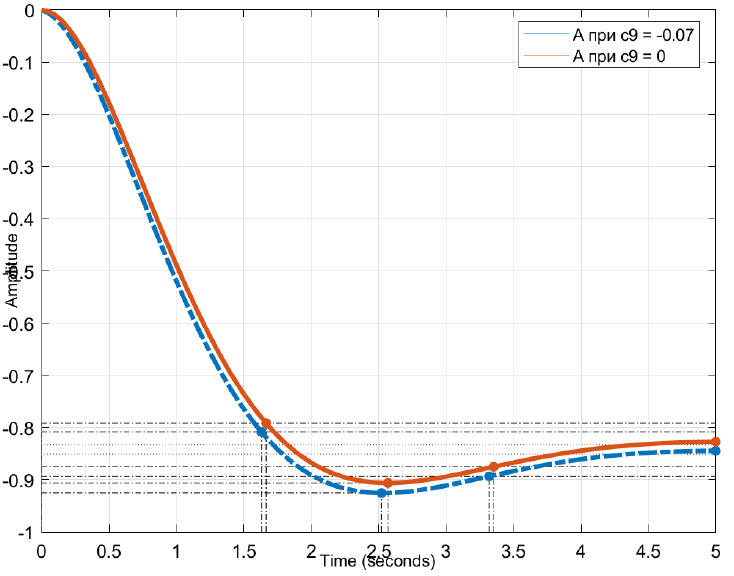  t,сек Рисунок 4. Переходный процесс по α H, м 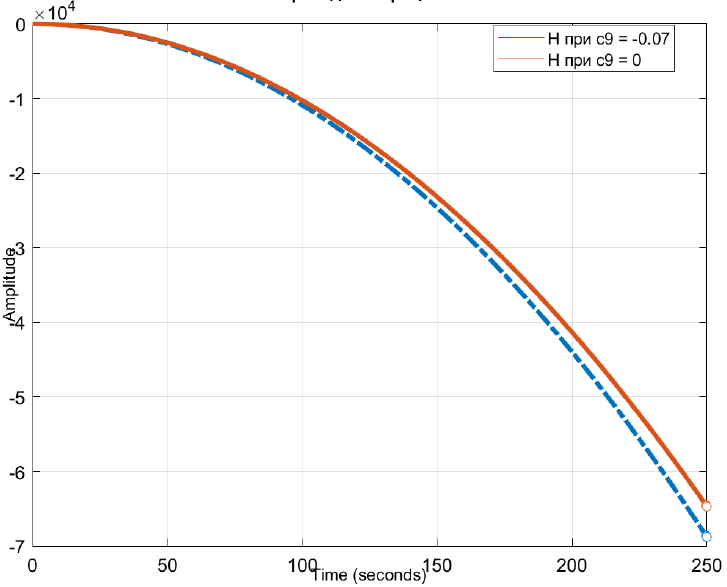 t,сек Рисунок 5. Переходный процесс по H 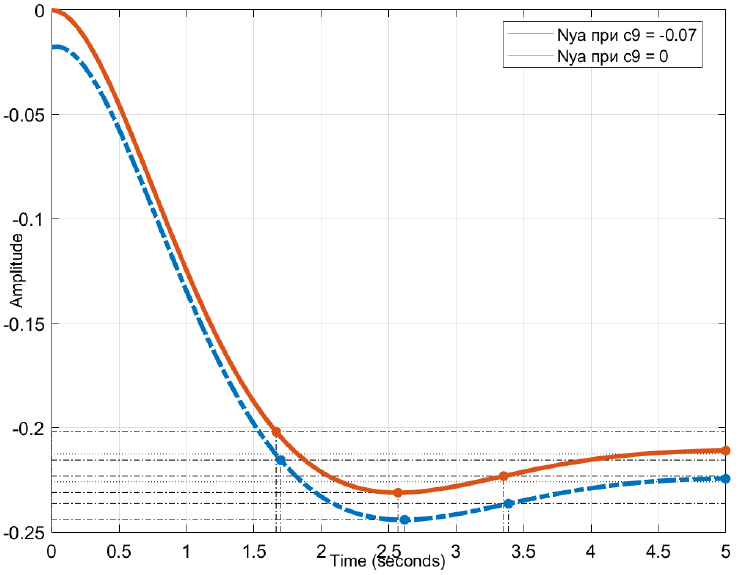 t,сек Рисунок 6. Переходный процесс по   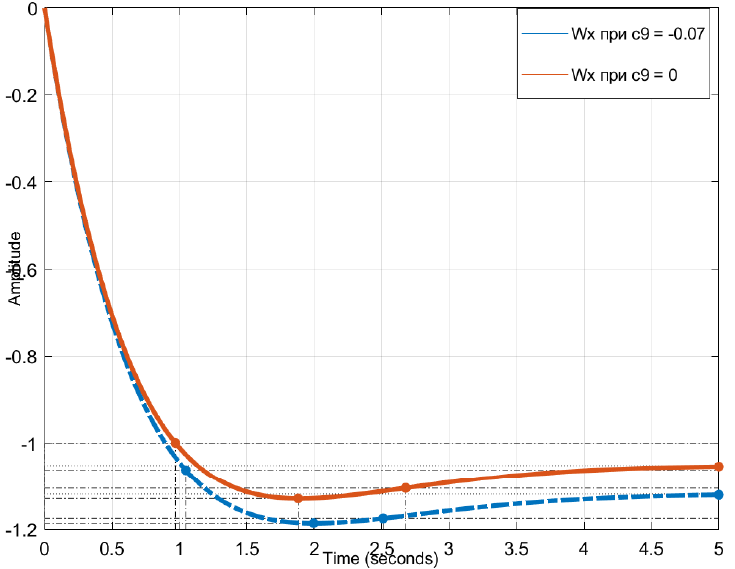 t,сек Рисунок 7. Переходный процесс по  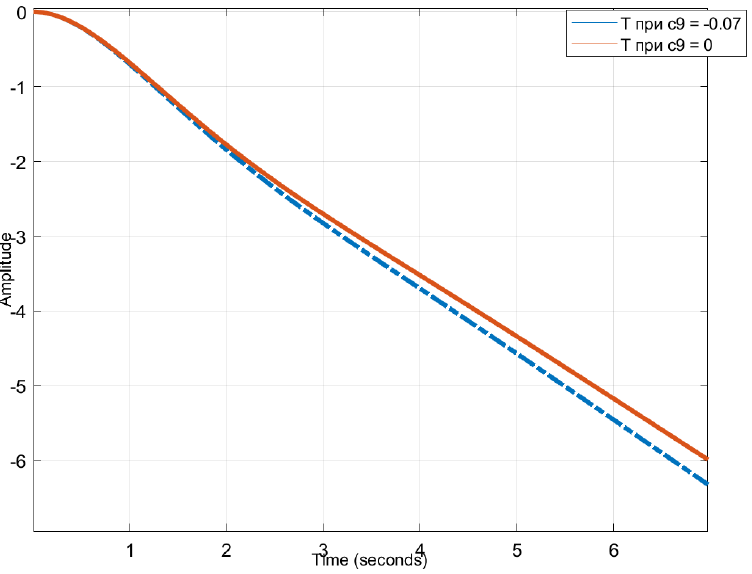  t,сек Рисунок 8. Переходный процесс по  Вывод: Отсутствие коэффициента возмущений приводит к уменьшению отклонения угла атаки, высоты, перегрузки, угловой скорости и отклонения угла тангажа. При этом время переходного процесса по углу атаки увеличивается, а по высоте и угловой скорости уменьшается. Демпфер тангажа При расчете параметров демпфера тангажа достаточно рассмотреть короткопериодическое движение системы самолет – демпфер ограничивая переменные состояния системы углом атаки и угловой скоростью.   где   При идеальных (безинерционных) исполнительных устройствах и датчиках, закон отклонения рулей можно записать в виде:  где x – отклонение ручки (штурвала) в [мм]. Обратная связь с коэффициентом  создает за счет отклонения рулей дополнительные моменты пропорциональные , искусственно изменяя демпфирование. создает за счет отклонения рулей дополнительные моменты пропорциональные , искусственно изменяя демпфирование. С учетом введенного уравнения характеристический многочлен принимает вид   Величины  являются динамическими характеристиками устойчивости и управляемости самолета. Статическими характеристиками могут служить коэффициенты усиления, особенно коэффициент усиления по перегрузке, которая характеризует маневр самолета, т.е. нормальное ускорение и радиус кривизны траектории при данной скорости. Требуемое значение находят из системы уравнений являются динамическими характеристиками устойчивости и управляемости самолета. Статическими характеристиками могут служить коэффициенты усиления, особенно коэффициент усиления по перегрузке, которая характеризует маневр самолета, т.е. нормальное ускорение и радиус кривизны траектории при данной скорости. Требуемое значение находят из системы уравнений  Введение демпфера увеличивает быстродействие системы. Структурная схема СУУ с демпфером тангажа и учетом динамики привода представлена на рис.9 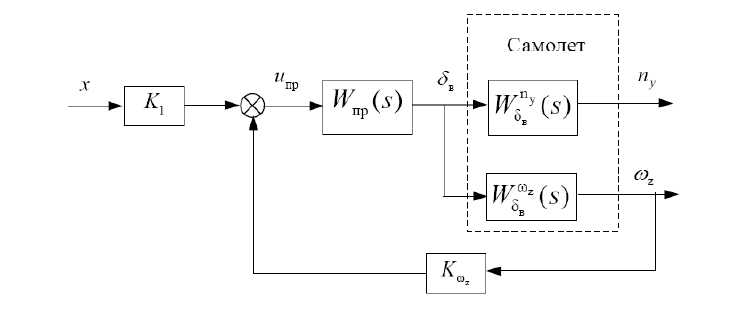 Рисунок 9. Структурная схема СУУ с демпфером тангажа и учетом динамики привода Линейная математическая модель привода имеет передаточную функцию  где  ; ;  Поскольку угол отклонения рулей при ручном управлении зависит от отклонения ручки управления, то в авиации в качестве статической характеристики управляемости используется коэффициент расхода перемещения ручки на единицу перегрузки и коэффициент расхода усилия, прикладываемого к ручке, на единицу перегрузки. Эти коэффициенты иначе называют градиентами перемещения  и усилия и усилия  по перегрузке. по перегрузке.Значение характеристики устойчивости и управляемости самолета могут не соответствовать желаемым с точки зрения оценок летчика при ручном управлении. Поэтому для возможности их улучшения могут вводиться автомат регулировки управления (АРУ), позволяющий изменять коэффициент усиления  между отклонением ручки (штурвала) управления и отклонения рулей, и обратные связи по сигналам датчика угловой скорости (ДУС) с регулируемыми коэффициентами усиления этих сигналов между отклонением ручки (штурвала) управления и отклонения рулей, и обратные связи по сигналам датчика угловой скорости (ДУС) с регулируемыми коэффициентами усиления этих сигналов  Коэффициент усиления по перегрузке определяется как  а градиент перемещения  Постановка задачи исследования: Создать схему имитационного моделирования короткопериодического движения самолета в среде MATLAB-SIMULINK на основании рис.3. Отобразить схему в отчете Решив уравнение  найти требуемое значение , обеспечивающее характеристики управляемости  . Проверить удовлетворяет найденное значение решению системы уравнений. . Проверить удовлетворяет найденное значение решению системы уравнений.Из структурной схемы рис.3, используя правила эквивалентных преобразований схем найти выражение для коэффициента усиления по перегрузке  Выбрать из условия обеспечения Построить графики реакции на единичное ступенчатое воздействие x = 1(t) по координатам  для двух случаев: для двух случаев:  Определить перерегулирование, время переходного процесса  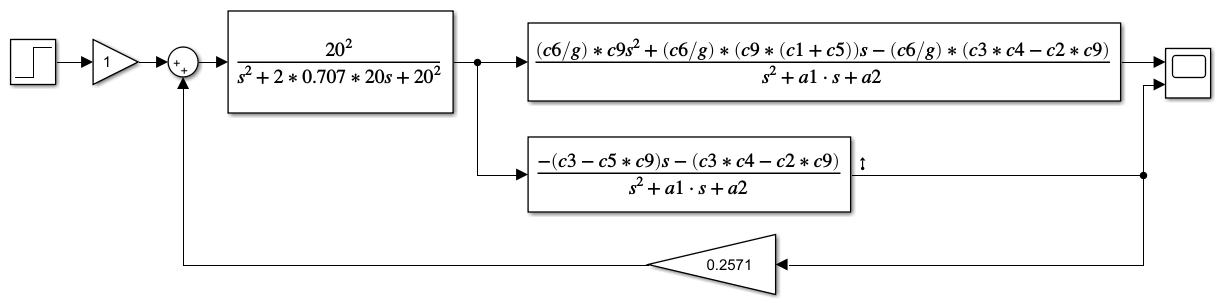 Рисунок 10. Математическая модель для демпфера тангажа 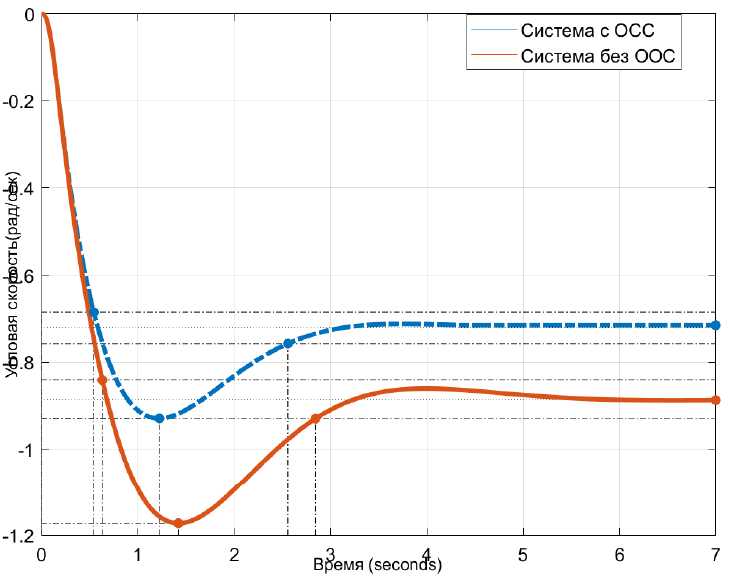 t,сек Рисунок 11. Переходный процесс по 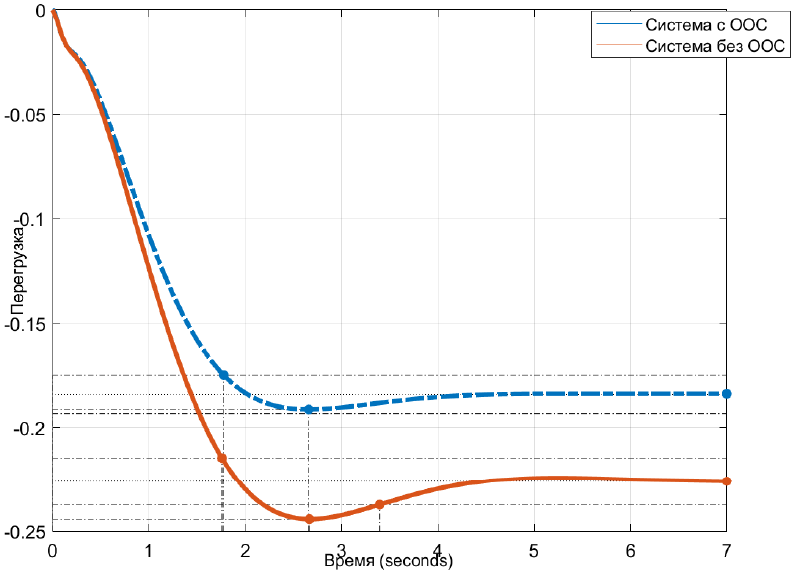 t,сек Рисунок 12. Переходный процесс по Вывод: Отсутствие демпфера тангажа приводит к увеличению угловой скорости и нагрузки. Время переходного процесса, при этом, по угловой скорости увеличивается, а по нагрузке не изменяется. |