3. Конспект лекций. Лекци и по дисциплине Эксплуатационные свойства автомобилей и безопасность движения
 Скачать 2.17 Mb. Скачать 2.17 Mb.
|

|
§2. Управляемость автомобиля 2.1 Основные понятия и определения Свойство автомобиля изменять траекторию движения соответственно управляющему воздействию водителя и сохранять заданную траекторию при действии реальных возмущений называются управляемостью. На траекторию движения автомобиля оказывает влияние большое число различных факторов. Плохая управляемость ограничивает тяговые и скоростные свойства автомобиля, приводит к быстрому утомлению водителя и снижению безопасности движения. Хорошая управляемость обеспечивает активную безопасность автомобиля при движении с высокой скоростью. На управляемость автомобиля оказывают влияние дорожное покрытие, характеристики шин, рулевой механизм и рулевая трапеция, углы установки управляемых колес. Рулевой механизм преобразует угол поворота рулевого колеса в угол поворота управляемых колес автомобиля, и передает стабилизирующий момент от колес на рулевое колесо. Все автомобили обладают свойством стабилизации. Стабилизация автомобиля – это способность автомобиля возвращаться в состояние прямолинейного движения при освобождении рулевого колеса. В контакте шины с дорогой при движении колеса с уводом образуется стабилизирующий момент шины. За счет установки управляемых колес с определенными углами создается дополнительный стабилизирующий момент шины. Суммарный стабилизирующий момент передается рулевым механизмом на рулевое колесо и образуется сила на рулевом колесе. Устойчивость управления оценивается в баллах по показателям устойчивости управления траекторией при прямолинейном движении, при торможении и управлении курсовым углом, а также по максимальным скоростям выполнения определенных испытаний. Курсовым углом называют угол между продольной осью дороги и продольной осью автомобиля. 2.2 Кинематика движения автомобиля с низкой скоростью на повороте Если при движении автомобиля на повороте боковые реакции колес не превышают 50…70% максимальных реакций по сцеплению, то такое движение относят к режиму движения с низкой скоростью. В этом режиме приближенно считают, что скорости центров колес располагаются в продольных плоскостях вращения колес. В таком режиме легко вычислить положение центра поворота автомобиля и построить траекторию движения. Рассмотрим движение автомобиля на повороте (рис. 2.1) со скоростью V. Пусть центр масс автомобиля расположен в точке C, и передние колеса повернуты на угол . Скорость колес V2 задней оси B направлена вдоль продольной оси автомобиля. Скорость колес V1 передней оси A направлена вправо (см. рис. 2.1). Проводим линии, перпендикулярные V1 и V2, и получаем точку их пересечения OП. В точке OП располагается центр поворота автомобиля. Все точки, расположенные на автомобиле, вращаются относительно центра OП, их скорости перпендикулярны лучам, выходящим из центра поворота. Завод изготовитель указывает в технической характеристике автомобиля минимальный радиус поворота RП: расстояние наиболее удаленной точки Г автомобиля от центра поворота (см. рис. 2.1). Для построения траектории движения автомобиля удобно использовать радиус Rв поворота задней оси. Для расчетов траектории движения применяют также расстояние от центра масс C до центра поворота OП. По рисунку отчетливо видно, что управляемые колеса должны быть повернуты на разные углы: л < п. Если взять л = п, то получим нежелательные боковые проскальзывания шин. Это приведет к повышенному износу шин, увеличится расход топлива. Для поворота колес на разные углы применяют рулевые трапеции.  Рис. 2.1. Схема к расчету движения автомобиля на повороте 2.3 Рулевые механизмы Рулевой механизм представляет собой редуктор. На автомобилях применяют механизмы с кинематическим передаточным числом 15…25 (с учетом рулевой трапеции). Кинематическое передаточное число i есть отношение угла поворота рулевого колеса к углу поворота управляемого колеса. Работу рулевого механизма также оценивают по силовому передаточному числу ip: отношению стабилизирующего момента на шинах к моменту на рулевом колесе. Для обеспечения хорошей управляемости при высоких скоростях число i стремятся сделать большего значения. Чтобы снизить момент на рулевом колесе, образующийся при ударах шин о препятствия, конструкторы делают число ip больше i, и уменьшают передачу момента от шины к рулю. Для этого применяют механизмы с небольшим обратным КПД: 0,5…0,65. Они передают весь момент на руле к шинам, а обратно – меньший момент. Для уменьшения усилия на рулевом колесе и удержания автомобиля на траектории при разрушении шин применяются гидроусилители. Они снижают усилие на руле в 10…15 раз. 2.4 Характеристика бокового увода шины Характеристикой бокового увода называют зависимость боковой реакции RY колеса от угла увода (рис. 2.2). При увеличении угла увода боковая реакция нарастает, достигает максимума RYMAX и затем снижается. Угол, при котором достигается RYMAX, называется критическим углом увода кр. Величина кр на дороге с высоким сцеплением составляет 11…13 град. Отношение RYMAX к нормальной нагрузке PZ отражает коэффициент бокового сцепления шины: Y= RYMAX/PZ. Рис. 2.2. Характеристика бокового увода шины (слева) и зависимость коэффициента сопротивления уводу шины от нормальной нагрузки (справа): 1 – радиальная шина, 2 – диагональная Управляемость автомобиля зависит от наклона характеристики RY= = f() области малых углов . Наклон характеристики оценивают коэффициентом сопротивления уводу: KY= RY/, где RY – приращение реакции; – приращение угла (см. рис. 2.2). Более информативным и удобным является удельный коэффициент по сопротивлению уводу: Y = KY/PZ, где PZ – нормальная нагрузка на колесо. Он позволяет сравнивать между собой различные шины. Шины радиальной конструкции обладают большим сопротивлением уводу (кривая 1), чем шины диагональной конструкции (кривая 2). С ростом нормальной нагрузки сопротивление уводу снижается (см. рис. 2.2). На графике показана нагрузка в процентах от экономичной (номинальной) нагрузки на шину. Чем больше коэффициент Y, тем меньше расход топлива и быстрее автомобиль реагирует на поворот руля, особенно при большой скорости движения. 2.5 Движение автомобиля на повороте Рассмотрим движение автомобиля на повороте с учетом углов увода управляемых колес (рис. 2.3). При движении с уводом образуются боковые реакции RY1 и RY2 колес, которые создают боковую силу инерции: RY1 + RY2 = M V2/Rп = PjY, где M – масса автомобиля; V – скорость центра масс C автомобиля; Rп – расстояние от центра C до центра OП (см. рис. 2.3). 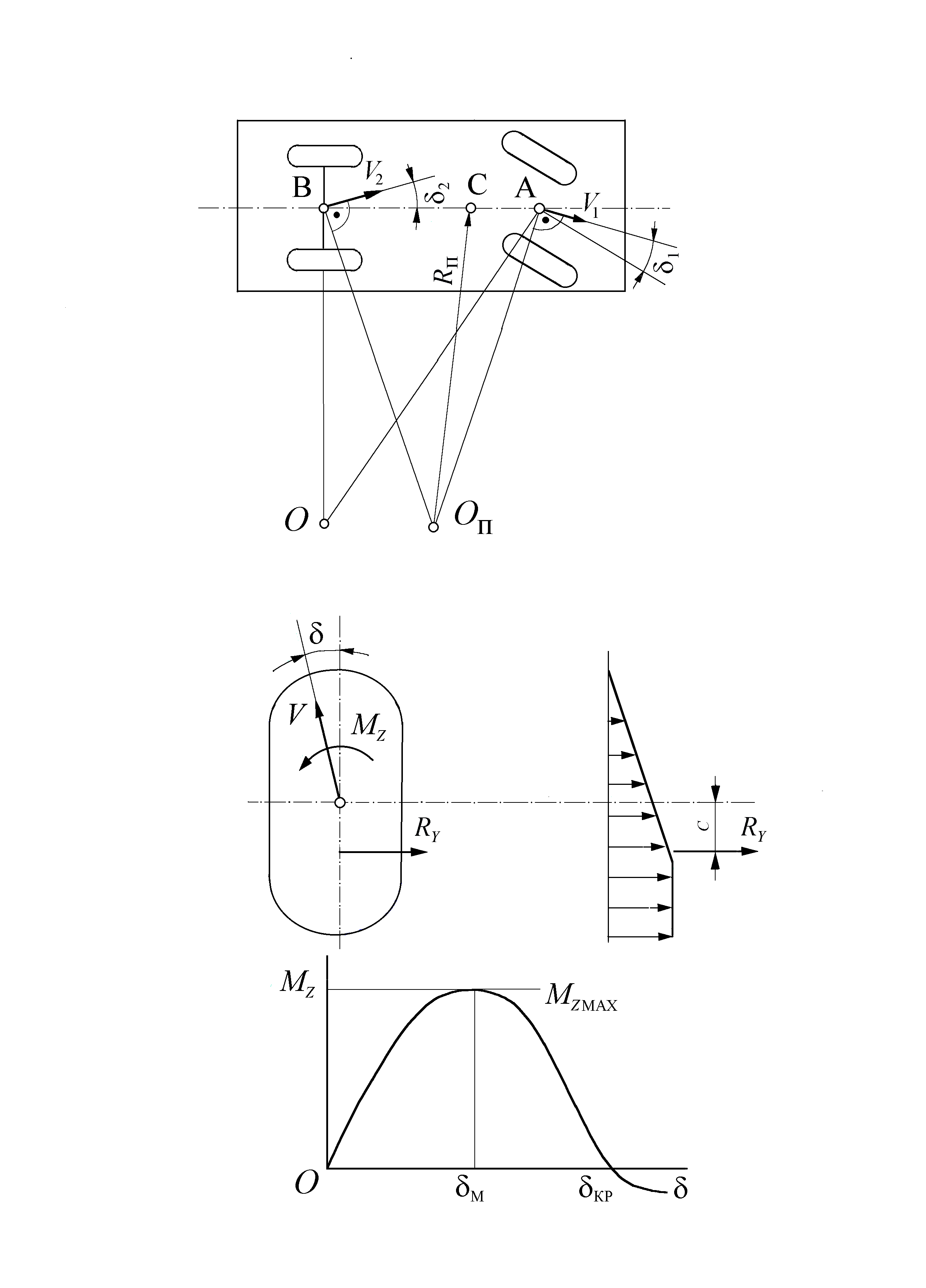 Рис. 2.3. Схема к расчету движения автомобиля на повороте с учетом углов увода колес Колеса передней оси движутся с углом увода 1, задней – с углом увода 2. Величины углов увода определяются характеристиками шин: 1 = = f(RY1) и 2 = f(RY2). Центр поворота автомобиля перемещается из точки O (без учета углов увода) в точку OП. Положение точки OП определяется пересечением двух линий, проведенных из середин передней и задней осей перпендикулярно векторам скоростей осей V1 и V2. Величина радиуса поворота связана с углами поворота колес и углами увода: Rп L/( + 2 – 1). (16) Точку OП называют мгновенным центром поворота, так как она перемещается при повороте руля и изменении скорости движения. При прямолинейном движении центр OП расположен в бесконечности. При качении колес с уводом центр поворота смещается вперед, по ходу движения автомобиля. Расчет траектории движения автомобиля выполняют по характеристикам его шин, используя которые вычисляют углы увода и боковые реакции. Для большинства практических расчетов удается представить характеристику увода линейной: RY= KY (или RY= Y PZ). Для расчета траектории движения автомобиля составляют системы дифференциальных уравнений, решение которых находят численным интегрированием на компьютере. По соотношению углов увода оценивают поворачиваемость автомобиля: 1 2 – нейтральная; 1 > 2 – недостаточная; 2 > 1 – избыточная. Конструкторы автомобиля стремятся обеспечить нейтральную его поворачиваемость во всех режимах движения и степени его загрузки. При нейтральной поворачиваемости достигается хорошая управляемость и устойчивость управления. Однако обеспечить во всех режимах движения нейтральную поворачиваемость невозможно. При недостаточной поворачиваемости автомобиль медленно, с запаздыванием, реагирует на поворот руля. При избыточной поворачиваемости автомобиль быстрее реагирует на поворот руля, но движение становится неустойчивым. 2.6 Стабилизация автомобиля При движении на повороте на руле автомобиля образуется стабилизирующий момент, стремящийся возвратить его в нейтральное положение, соответствующее прямолинейному движению. Момент на руле создает водителю чувство дороги. Конструкторы автомобиля обеспечивают на руле момент, пропорциональный углу поворота колес, и приемлемую для водителя величину этого момента. Момент на руле создается шиной и дополнительно конструкцией подвески с помощью углов установки колес. При качении шины с уводом образуется стабилизирующий момент MZ, поворачивающий колесо относительно его вертикальной оси (рис. 2.4). При движении шины с углом увода и повороте колеса по часовой стрелке образуется пятно контакта (см. рис. 2.4, вверху, слева). Элемент протектора входит в контакт и сцепляется с дорогой, затем перемещается влево (см. рис. 2.4, вверху, справа). На элементе образуется сила, которая сначала линейно возрастает, затем ограничивается коэффициентом сцепления. Образуется эпюра поперечных касательных напряжений в виде трапеции. Сумма напряжений по всему контакту равна боковой реакции RY. Из-за несимметричности эпюры точка приложения реакции RY смещается вниз на плечо c. Образуется стабилизирующий момент MZ, поворачивающий шину против направления вращения часовой стрелки. При увеличении угла увода момент MZ возрастает, достигает максимума, а затем снижается. Наибольшее значение MZMAX момента достигается при угле увода примерно кр/2. Для легковых шин различного размера момент оставляет 150…250 Нм. При достижении углом = кр момент становится равным нулю, затем он становится отрицательным (дестабилизирующим), но малой величины. На покрытии с высоким сцеплением только нарастающий участок характеристики MZ= f() подходит для обеспечения стабилизирующего момента на руле MР. При низком сцеплении момент MZ становится небольшим и его недостаточно для создания MР. При углах увода = кр требуется наибольший момент MР, но момент MZ= 0. Следовательно, с помощью одного стабилизирующего момента шины невозможно создать момент MР на руле и обеспечить водителю чувство дороги. Рис. 2.4. Механизм образования стабилизирующего момента в контакте шины; характеристика стабилизирующего момента Чтобы получить момент MР на руле при углах увода = кр и более, ось поворота управляемого колеса наклоняют в продольной плоскости автомобиля на угол (рис. 2.5). Образуется дополнительное плечо d действия боковой реакции RY: d= rd sin (), где rd – динамический радиус колеса (см. рис. 2.5). На колесе возникает дополнительный стабилизирующий момент: MZ = d RY. Момент MZ складывается с моментом шины MZ, в области больших углов увода появляется требуемый момент на руле. Для получения момента на руле при низком сцеплении ось поворота управляемых колес наклоняют в поперечной плоскости на угол (рис. 2.6). При повороте колеса контакт шины вращается в плоскости DD, на плече обкатки u. При повороте руля автомобиль поднимается и образуется дополнительный, весовой стабилизирующий момент: MZ = PZ u sin () (1 – cos ()). Момент MZ не зависит от реакции RY (см. рис. 2.6). Он обеспечивает на покрытии с низким сцеплением момент на руле при значительных углах поворота колес . Угол для легковых автомобилей составляет 0,5..1,5. Конструктор, подбирая углы и , получает приемлемую характеристику момента на руле MZ= f(). 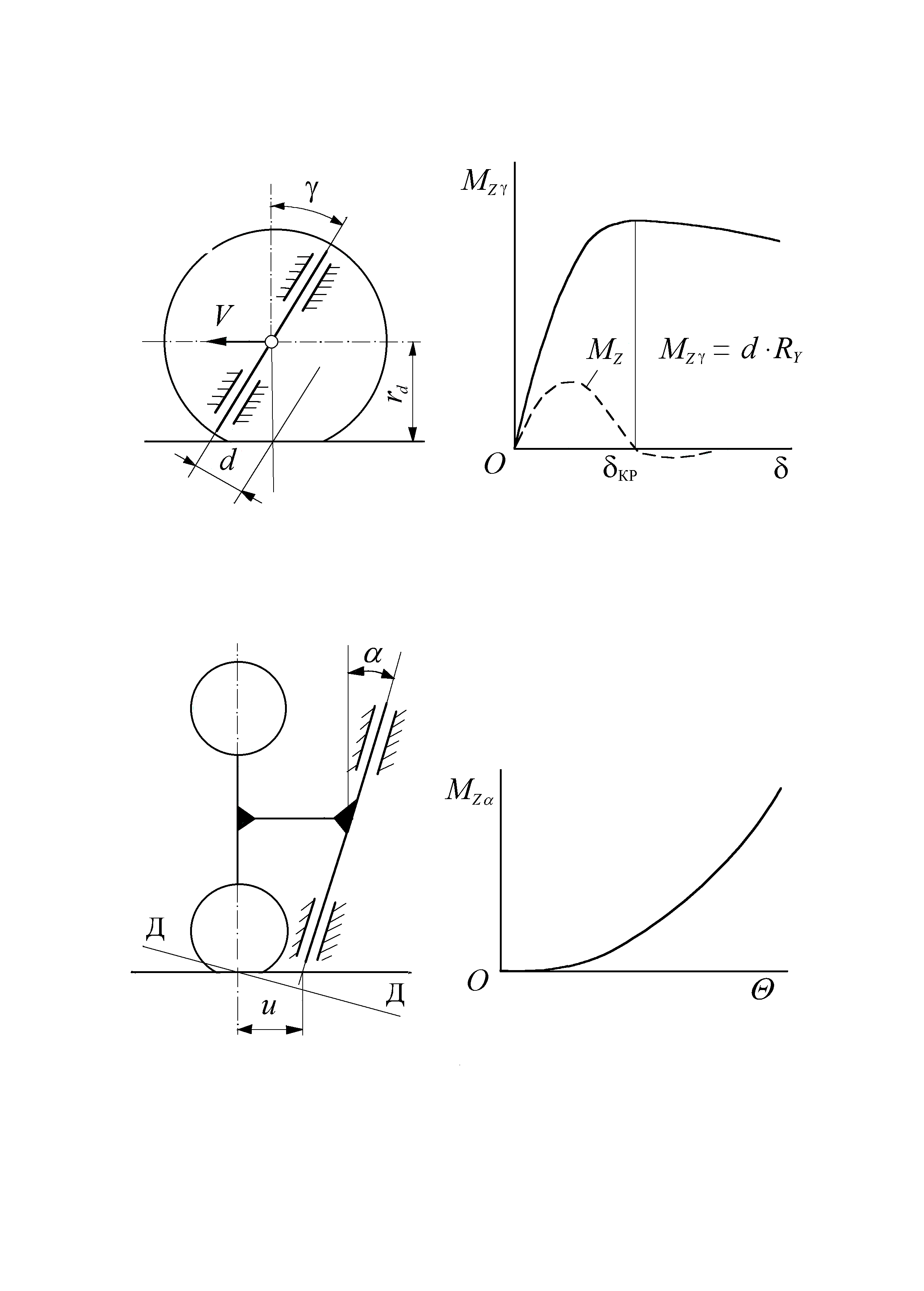 Рис. 2.5. Дополнительный стабилизирующий момент, создаваемый путем продольного наклона оси поворота колеса (шкворня) Управляемые колеса устанавливаются со схождением. Схождение задается углом схождения 0,5…1. Схождение обеспечивает небольшие боковые реакции, прижимающие колеса к середине автомобиля. Выбираются зазоры в подшипниках, повышается точность курсового управления. Управляемые колеса наклоняют в поперечной плоскости на угол развала 0,5..1,5. Это компенсирует прогиб передней балки (или кузова) под действием нагрузки.  Рис. 2.6. Дополнительный стабилизирующий момент от поперечного наклона оси поворота колеса (шкворня) 2.7 Испытания автомобиля Общие технические требования к управляемости автомобилей оговорены в ОСТ 37.001.487-89. Стандарт не распространяется на автомобили, скорость которых менее 40 км/ч, и имеющие менее четырех колес. Показатели управляемости определяются для автомобилей в груженом состоянии. 1) Нормируется величина усилия на рулевом колесе. Усилие в Н на рулевом колесе не должно превышать следующих значений:
2) Должен обеспечиваться возврат рулевого колеса в нейтральное положение после его освобождения (стабилизация автомобиля). При этом после освобождения руля угол поворота колеса не должен увеличиваться. Возврат рулевого колеса должен происходить без колебаний. 3) Замеряется характеристика статической поворачиваемости автомобиля. Она представляет собой функцию: R = т/V = f (р), где т – угловая скорость автомобиля, V – скорость автомобиля, р – угол поворота рулевого колеса; R – радиус поворота. 4) Замеряется характеристика дрейфа автомобиля. Она представляет собой функцию курсового угла дрейфа: = f(Wy), где Wy – боковое ускорение автомобиля; – угол отклонения продольной оси автомобиля от касательной к заданной траектории движения. Устанавливаются наибольшие значения углов дрейфа:
5) Нормируется реакция автомобиля на быстрый поворот руля (рывок руля или вход в поворот). В этом режиме стандарт ограничивает значения углов поворота рулевого колеса. Время установления 90% реакции в интервале боковых ускорений от 2 до 4 м/с2 не должно превышать 0,8 с для категорий М1, М2, N1 и 2,0 с – для категорий М3, N2, N3. 6) Проводятся дополнительные испытания автомобилей водителями – экспертами. Оценивается в баллах (1…5) устойчивость управления траекторией, курсовое управление, управление траекторией при торможении, устойчивость курсового управления. 7) Замеряется наибольшая скорость выполнения маневра «переставка» – перестроения автомобиля из одной полосы движения в другую. При испытаниях автомобиля, находящегося в эксплуатации, измеряют люфт рулевого колеса. | |||||||||||||||||||||||||||||||||||||||||||||||||||||