биомеханика. Лекция Тема 3 Биомеханика опорнодвигательного аппарата человека
 Скачать 255.75 Kb. Скачать 255.75 Kb.
|

|
Лекция 3. Тема 3: Биомеханика опорно-двигательного аппарата человека. Цель: дать знания о биомеханичских особенностях строения ОДА человека. (2 ч.) План Устройство двигательного аппарата с позиции биомеханики. Распределение масс тела человека. Определение общего центра масс тела человека аналитическим способом. Звенья тела как рычаги. Звенья тела как маятники. Механические свойства костей и суставов. Биомеханика мышц. Устройство двигательного аппарата с позиции биомеханики. Двигательный аппарат человека — это самодвижущийся механизм, состоящий из 600 мышц, 200 костей, нескольких сотен сухожилий. Считается, что двигательная деятельность человека сравнима по сложности с человеческим мозгом — самым совершенным созданием природы. И подобно тому как изучение мозга начинают с исследования его элементов (нейронов), так и в биомеханике прежде всего изучают свойства элементов двигательного аппарата. Двигательный аппарат состоит из звеньев. Звеном называется часть тела, расположенная между двумя соседними суставами или между суставом и дистальным концом. Например, звеньями тела являются: кисть, предплечье, плечо, голова и т. д. В человеческом теле около 70 звеньев. Но столь подробного описания распределениия масс чаще всего и не требуется. Для решения большинства практических задач достаточно 15-звенной модели человеческого тела (рис. 7). Понятно, что в 15-звенной модели некоторые звенья состоят из нескольких элементарных звеньев. Поэтому такие укрупненные звенья правильнее называть сегментами.  Рис.7 Сегментирование тела человека: справа — способ деления тела на сегменты и масса каждого сегмента (в % к массе тела); слева — места расположения центров масс сегментов (в % к длине сегмента)— см. табл. 1 (по В. М. Зациорскому, А. С. Аруину, В. Н. Селуянову) Цифры на рис. верны для “среднего человека”, они получены путем усреднения результатов исследования многих людей. При рассмотрении техники движений избранного вида спорта и их анализе не всегда нужно учитывать все тонкости анатомического строения и сложность физиологических процессов протекающих в тот момент в организме человека. Поэтому используют упрощенную модель тела человека, которую называют биомеханической системой. Биомеханическая система – это упрощенная модель тела человека, которая совершает те же движения, что и человек, обладает основными свойствами существенными для выполнения двигательных функций. На ней изучают закономерности движений. Биокинематическая пара - два костных звена, соединенные суставом. Биокинематическая цепь - несколько биокинематических пар, соединенных последовательно. Биокинематические цепи бывают замкнутые и незамкнутые. Незамкнутая биокинематическая цепь имеет свободное (конечное) звено. Здесь возможны изолированные движения в отдельно взятом звене. Замкнутая биокинематическая цепь - нет свободного конечного звена. Здесь изолированные движения в одном звене не возможны, т.к. в движение неизбежно вовлекаются и другие соединения. Если звено получит связь с другим звеном посредством опоры или захвата, тогда незамкнутая связь может перейти в замкнутую. Наиболее распространенными моделями ОДА считаются: шарнирно-стержневая и шарнирно-рычажная модель ОДА. Шарнирно-стержневая модель – это схема ОДА, которая состоит из системы твердых стержней. Эти стержни по своим линейным размерам и массам отображают звенья тела. Они соединены между собой шарнирами (суставами), с учетом их чисел степеней свободы. Число степеней свободы – это способность тела двигаться в пространстве во всех трех измерениях поступально и вращятельно Количеством степеней свободы тела - количество независимых координат, которые определяют перемещение тела в пространстве. Тело может передвигаться относительно трех взаимно-перпендикулярных осей поступательно и совершать вокруг них вращательные движения (рис.8). 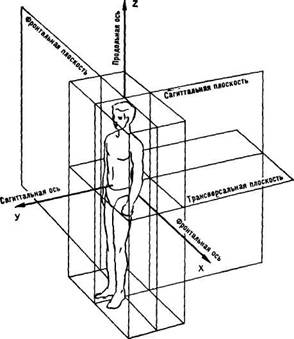 Рис.8 Схема осей и плоскостей в теле человека. Свободно брошенное тело имеет шесть степеней свободы. Каждая связь уменьшает число степеней свободы. Зафиксировав одну точку свободного тела, сделав его звеном пары, сразу лишают его трех степеней свободы. А именно возможность линейных перемещений вдоль трех основных осей координат. Например, в тазобедренном суставе возможно вращение относительно трех осей, т.е. он имеет три степени свободы. Закрепление двух точек звена говорит о наличии оси, проходящей через эти точки. Например, в межфаланговом суставе возможно вращение относительно одной оси, т.е. он имеет одну степень свободы. Степени свободы суммируются в открытых (разомкнутых) биоки-нематических цепях. Так, у бедра, относительно таза 3 степени свободы, у голени относительно бедра - 2 степени, значит у голени относительно таза уже 5 степеней свободы. Поэтому возможности комбинаций всех траекторий движения во всех суставах больше. В спортивной практике ограничивают число степеней свободы для рационального выполнения движения и экономии энергии т.е. выполняют только те движения, которые вызовут прямолинейные поступательные движения вдоль дистанции (например, гребля). Шарнирно-рычажная модель ОДА – имеет основу шарнирно стержневой модели, а также в ней учитываются внешние силы и силы тяги мышц, которые приложены к звеньям тела как к рычагам. С точки зрения механики кости, соединенные подвижно в суставах представляют собой рычаги. Рычаг – это устройство для передачи силы на расстояние. Биомеханическая система – это система рычагов, которая с помощью мышц совершает движение. В мышцах происходит преобразование энергии энергоносителей в механическую работу. Распределение масс тела человека. Распределение масс между звеньями тела и внутри звеньев, количественно описывается масс-инерционными характеристиками. Важнейшие из них — масса, момент инерции и координаты центра масс. Зная, каковы массы и моменты инерции звеньев тела и где расположены их центры масс, можно решить ряд важных практических задач. Например: — определить количество движения тела спортсмена, равное произведению массы тела на его линейную скорость (m·v); — определить кинетический момент тела спортсмена, равный произведению момента инерции тела на угловую скорость (J·W); при этом нужно учитывать, что величины момента инерции относительно разных осей неодинаковы; — оценить, легко или трудно управлять скоростью тела или отдельного звена; — определить степень устойчивости тела и т. д. Масса (т)— это количество вещества (в килограммах), содержащееся в теле или отдельном звене. Вместе с тем масса — это количественная мера инертности тела по отношению к действующей на него силе. (Инертность – свойство физических тел, проявляющееся в постепенном изменении скорости с течением времени под действием сил.) Чем больше масса, тем инертнее тело и тем труднее вывести его из состояния покоя или изменить его движение. Массой определяются гравитационные свойства тела. Вес тела (в Ньютонах) Масса характеризует инертность тела при поступательном движении. При вращении инертность зависит не только от массы, но и от того, как она распределена относительно оси вращения. Чем больше расстояние от звена до оси вращения, тем больше вклад этого звена в инертность тела. Количественной мерой инертности тела при вращательном движении служит момент инерции: где Rин — радиус инерции — расстояние от оси вращения (например, от оси сустава) до материальных точек тела. При вращательном движении относительно одной и той же оси проходящей через человеческое тело момент инерции зависит не только от массы, но и от позы. Например, на рис. 9 изображена фигуристка, выполняющая вращение. На рис. 8, А спортсменка вращается быстро и делает около 10 оборотов в секунду. В позе, изображенной на рис. 9, Б, вращение резко замедляется и затем прекращается. Это происходит потому, что, отводя руки в стороны, фигуристка увеличивает момент инерции относительно вертикальной оси вращения.  Рис. 9. Замедление вращения при изменении позы: А — меньшая; Б — большая величина радиуса инерции и момента инерции, который пропорционален квадрату радиуса инерции. Центром масс называется геометрическая точка, местоположение которой рассчитывается по формуле:   , ,  . .Например, рассчитаем положение ОЦМ спортсмена. На рисунке 10 показано тело человека в позе лыжника, черными кружками показаны положения центров тяжести звеньев тела (1 – головы, 2- двух рук, 3 – туловища и шеи, 4 – опорной ноги, 5 – другой ноги). Принимая, что масса головы 7% от массы тела, обеих рук 12%, туловища 43%, каждой ноги по 19%. Для этого воспользуемся формулой приведенной выше. 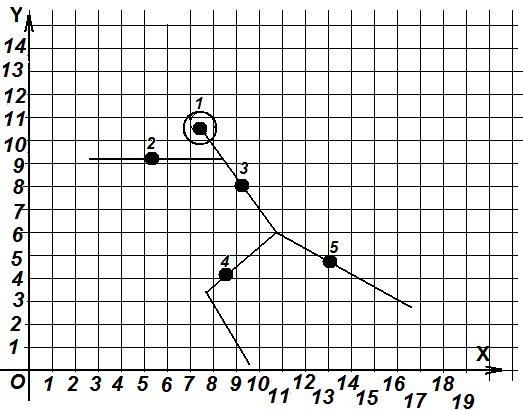 Рис. 10. Шарнирно-стержневая модель лыжника. =  = = Обозначим рассчитанные координаты точки ОЦМ лыжника на рисунке. В точке ОЦМ, как принимают для расчетов, сосредоточена вся масса тела. Говоря о траектории движения, скорости, ускорении тела подразумевают именно движение центра масс (ЦМ). ЦМ твердого тела является вполне определенной фиксированной точкой, не изменяющей своего положения относительно тела. ЦМ системы тел может менять свое положение, если изменяются расстояния между точками этой системы. В биомеханике различают ЦМ отдельных звеньев тела, ЦМ всего тела. Положение общего центра масс тела определяется тем, где находятся центры масс отдельных звеньев. А это зависит от позы, т. е. от того, как части тела расположены друг относительно друга в пространстве. У человека, стоящего в основной стойке, горизонтальная плоскость, проходящая через ОЦМ, находится примерно на уровне второго крестцового позвонка. В положении лежа ОЦМ смещается в сторону головы примерно на 1%. У женщин он расположен в среднем на 1 – 2% ниже, чем у мужчин; у детей- дошкольников он существенно выше, чем у взрослых. При изменении позы ОЦМ тела смещается и в некоторых случаях, при наклонах вперед и назад, может находиться вне тела человека. Чтобы определить положение ОЦМ тела используют экспериментальные и расчетные методы. Наиболее простой экспериментальный метод – взвешивание человека в избранной позе на специальной платформе, имеющей три точки опоры. 3. Определение общего центра масс тела человека аналитическим способом. Для определения ОЦМ тела аналитическим способом: 1. Определяют длину звеньев (см). 2. Рассчитывают вес Р (кг) всех звеньев тела по формуле:  Pi-абсолютный вес звена (кг); Рт-вес тела спортсмена (кг); Ротн-относительный вес звена (%) 3.. Вычисляют расстояние от центра масс (ЦМ) каждого звена до его проксимального конца:  , где , где Lзв - длина звена, ki - коэффициент, определяющий относительно расстояние ЦМ от проксимального конца сустава. Данные заносят в таблицу 2. Таблица 2 Исходные данные для определения ОЦМ тела спортсмена
4. Строят схематично выбранную статистическую позу в декартовой системе координат в соответствии с размерами звеньев тела, заменяя сантиметры на миллиметры в результате получается поза в масштабе 1: 10.  Рис. 11. 5. На построенной позе отмечают положение ЦМ звеньев (рис.11).ЦТ кисти в расслабленном состоянии лежит в области поясно-фалангового сустава среднего пальца, в сжатом состоянии - в центре кулака. ЦТ головы находится на мысленном пересечении взаимно перпендикулярных линий, проведенных через слуховые отверстия через переносицу (в области турецкого седла). Для построения на чертеже измерить расстояние от слухового отверстия до ключичной впадины в сантиметрах. Для стопы центр масс определяют следующим образом: отрезок, равный половине длины стопы, откладывают под углом 120 град. к стопе, полученную точку соединить с концами пальцев линией, на которой находят центр масс стопы. 6. Измеряют горизонтальную и вертикальную координаты ЦТ звеньев тела. 7. Вычисляют значения горизонтальных моментов статистических сил и вертикальных моментов статистических сил, действующих на все звенья, относительно осей Х и Y. Данные заносят в таблицу 3. . Таблица 3 Расчет координат ОЦМ тела спортсмена
8. Находят горизонтальную и вертикальную координаты ОЦМ тела спортсмена.  Pi-абсолютный вес звена тела спортсмена, Xi-горизонтальные координаты ЦТ звена, Yi - вертикальные координаты ЦТ звена, Х,У - координаты ЦТ. 9. Отмечают положение ОЦТ на схеме. Если равнодействующая всех сил приложена в ЦМ, то тело будет двигаться поступательно. В поле гравитации (когда действует сила тяжести) центр масс совпадает с центром тяжести. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
