Электротехника. Реферат №2 Магнитные цепи, синхронные машины, ма. Магнитные цепи, синхронные машины, машины постоянного тока
 Скачать 0.95 Mb. Скачать 0.95 Mb.
|

|
Пуск двигателей постоянного тока В начальный момент пуска двигателя якорь неподвижен и противо-э.д.с. и напряжение в якоре равна нулю. Сопротивление цепи якоря невелико, поэтому пусковой ток превышает в 10 - 20 раз и более номинальный. Это может вызвать значительные электродинамические усилия в обмотке якоря и чрезмерный ее перегрев, поэтому пуск двигателя производят с помощью пусковых реостатов - активных сопротивлений, включаемых в цепь якоря. Двигатели мощностью до 1 кВт допускают прямой пуск. Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя. Реостат выполняют ступенчатым для улучшения плавности пуска электродвигателя. В начале пуска вводится все сопротивление реостата. По мере увеличения скорости якоря возникает противо-э. д. с, которая ограничивает пусковые токи. Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение. Механические характеристики электродвигателей постоянного тока Рассмотрим двигатель с параллельным возбуждением в установившемся режиме работы (рис. 11.14). Обмотка возбуждения подключена параллельно якорной обмотке. 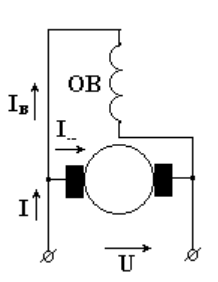 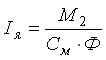  (11.6) (11.6)Механической характеристикой двигателя называется зависимость частоты вращения якоря n2 от момента на валу M2 при U = const и Iв = const. Уравнение (11.6) является уравнением механической характеристики двигателя с параллельным возбуждением. Рис. 11.14 Эта характеристика является жесткой. С увеличением нагрузки частота вращения такого двигателя уменьшается в небольшой степени (рис. 11.15). Н  а рисунке 11.16 изображен двигатель последовательного возбуждения. Якорная обмотка и обмотка возбуждения включены последовательно. а рисунке 11.16 изображен двигатель последовательного возбуждения. Якорная обмотка и обмотка возбуждения включены последовательно. 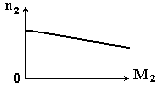 Рис. 11.15 Рис. 11.16 Рис. 11.15 Рис. 11.16Ток возбуждения двигателя одновременно является током якоря. Магнитный поток индуктора пропорционален току якоря. где k - коэффициент пропорциональности. Момент на валу двигателя пропорционален квадрату тока якоря. откуда  Механическая характеристика двигателя последовательного возбуждения является мягкой (рис. 11.17). 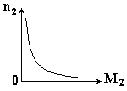 Рис. 11.17 Рис. 11.17Уравнение механической характеристики двигателя последовательного возбуждения выглядит следующим образом:  С увеличением нагрузки скорость двигателя резко падает. С уменьшением нагрузки на валу двигатель развивает очень большую частоту вращения. Говорят, что двигатель идет вразнос. Работа двигателя последовательного возбуждения без нагрузки недопустима. Двигатель смешанного возбуждения имеет механическую характеристику, представляющую собой нечто среднее между механическими характеристиками двигателя параллельного и последовательного возбуждения. Двигатели с параллельным возбуждением применяются для привода станков и различных механизмов, требующих широкой регулировки скорости. Двигатели с последовательным возбуждением применяются в качестве тяговых двигателей электровозов, трамваев и т.д. Регулирование частоты вращения машин постоянного тока В общем случае частота вращения двигателей постоянного тока определяется выражением где U — напряжение, подводимое к якорю двигателя; 1а— ток якоря; £Да — сумма сопротивлений якоря и всех последовательно включенных обмоток; СЕ- коэффициент, зависящий от обмоточных данных двигателя; Ф — магнитный поток машины. Из приведенного выражения следует, что частота вращения двигателя при неизменной нагрузке может быть изменена регулированием питающего напряжения U, включением последовательно с якорем дополнительного регулировочного резистора (изменение £.Ra) и изменением магнитного потока машины (изменением тока возбуждения). В практике применяются все три способа регулирования. Регулирование частоты вращения изменением подводимого напряжения встречает трудности, связанные со сложностью пре-обра'зования напряжения постоянного тока. Для этой цели либо применяют статические преобразователи напряжения, либо питают двигатель от отдельного генератора постоянного тока, допускающего плавное регулирование напряжения (система генератор — двигатель). Такие системы применяют лишь для отдельных специальных приводов, требующих регулирования частоты вращения по сложной программе, например для главных двигателей прокатных станов. Регулирование частоты вращения потоком является наиболее экономичным способом, так как потери в регулировочных резисторах, включаемых для этой цели последовательно с обмоткой возбуждения, невелики из-за малого тока возбуждения. Однако этот способ позволяет лишь увеличивать частоту вращения двигателей по сравнению с номинальной. Такой способ регулирования предусмотрен для всех серийных двигателей постоянного тока. Включение добавочного резистора в цепь якоря дает возможность плавно регулировать частоту вращения, но сопряжено с большими потерями в регулировочном реостате, по которому проходит полный ток нагрузки. Этот способ используется, например, для регулирования частоты вращения тяговых двигателей. В современных системах регулирования частоты вращения двигателей постоянного тока применяются тиристорные схемы, позволяющие осуществить регулирование частоты вращения в широких пределах по заданной программе. Датчиками частоты вращения для осуществления обратной связи при регулировании могут быть тахогенера-торы, размещенные на валу якоря двигателя. |