  Кинематический расчет привода и выбор электродвигателя
Спроектировать привод к машине:
Nрв= 20 кВт;
частота вращения рабочего вала
nрв= 20 об./мин.
 Оптимизация привода Оптимизация привода
Привод – устройство для приведения в действие машин от двигателя через передаточные механизмы. Соединение вала машины с валом электродвигателя, напрямую, возможно лишь в редких случаях. В основном, для привода машины, необходима установка понижающей или повышающей передачи. Оптимальный тип передачи определяют с учетом ряда факторов: эксплуатационных условий, характеристик нагрузки, срока службы, техники безопасности, удобства расположения, обслуживания, стоимости привода.
Наибольшее распространение в промышленности получили трехфазные асинхронные двигатели серии 4А ГОСТ 19523 – 81. Двигатели выпускаются с синхронной частотой 3000, 1500, 1000 и 750 об/мин.
Передаточное число привода (без учета скольжения):
𝑢пр = 𝑛 с 𝑛 𝑛рв Uпр = 3000/20 = 150 Uпр =1500/20 = 75 Uпр =1000/20 = 50 Uпр = 750/20 = 37,5
Электродвигатели с низким числом оборотов имеют большие размеры и соответственно большую стоимость. Двигатели с высокой частотой вращения (3000 об./мин.) имеют меньший рабочий ресурс по сравнению с низкооборотными двигателями. Поэтому для дальнейшего сравнения и расчетов, выберем двигатель с частотой вращения 1000 об./мин.
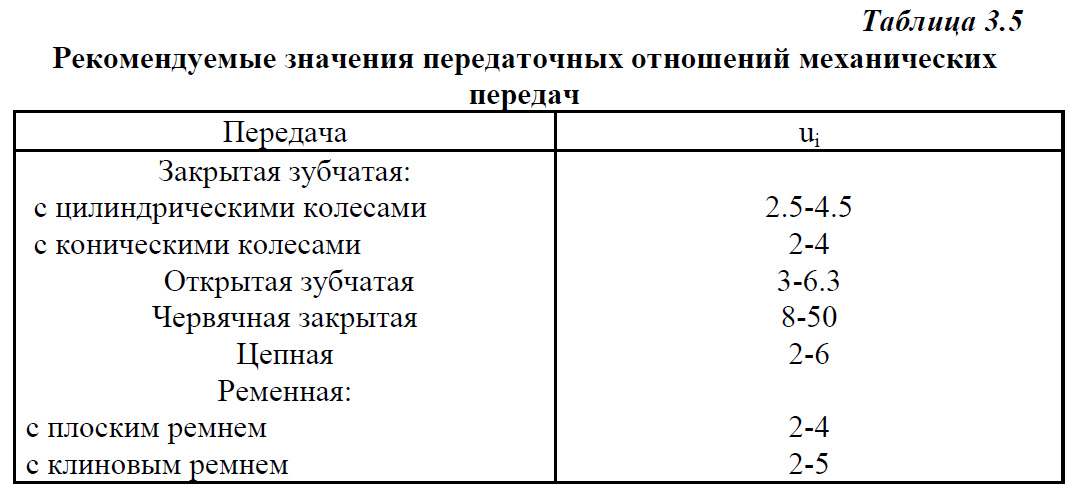
При передаваемой мощности в 20 кВт использование ременных и цепных передач нецелесообразно, поэтому выбираем в качестве открытой передачи, зубчатую передачу.
Рекомендуемое значение передаточного числа открытой зубчатой передачи лежит в пределах 3÷6,3, принимаем, предварительно, для открытой передачи Uоп = 5, тогда для редуктора:
 Up = Uпр / Uоп = 50/5 = 10 при 1000 об./мин. Up = Uпр / Uоп = 50/5 = 10 при 1000 об./мин.
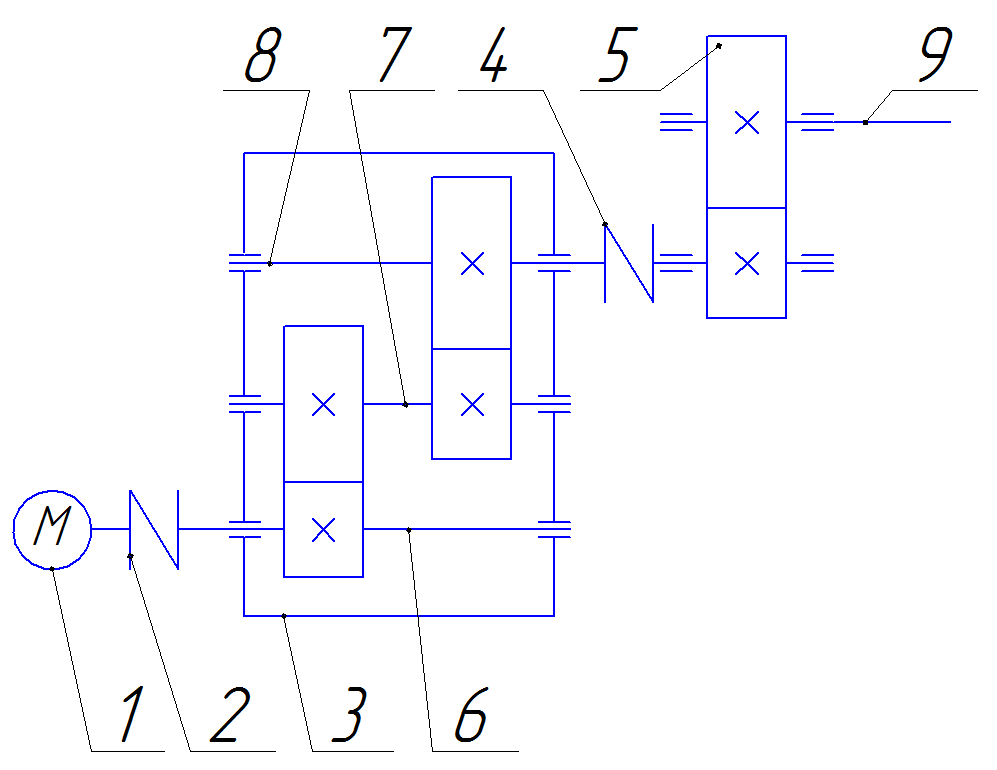  Вычерчиваем кинематическую схему привода. Вычерчиваем кинематическую схему привода.
Определение общего
передаточного числа привода

пр
𝑈 = 𝑛с 𝑛рв (1.1)
где nс – синхронная частота вращения вала
электродвигателя, об./ мин.;
nрв – частота вращения рабочего вала машины, об./мин.
𝑈пр = 1000  20 = 50
Определение КПД привода
пк
зп
оп
 𝜂пр = 𝜂5 ∙ 𝜂2 ∙ 𝜂 𝜂пр = 𝜂5 ∙ 𝜂2 ∙ 𝜂
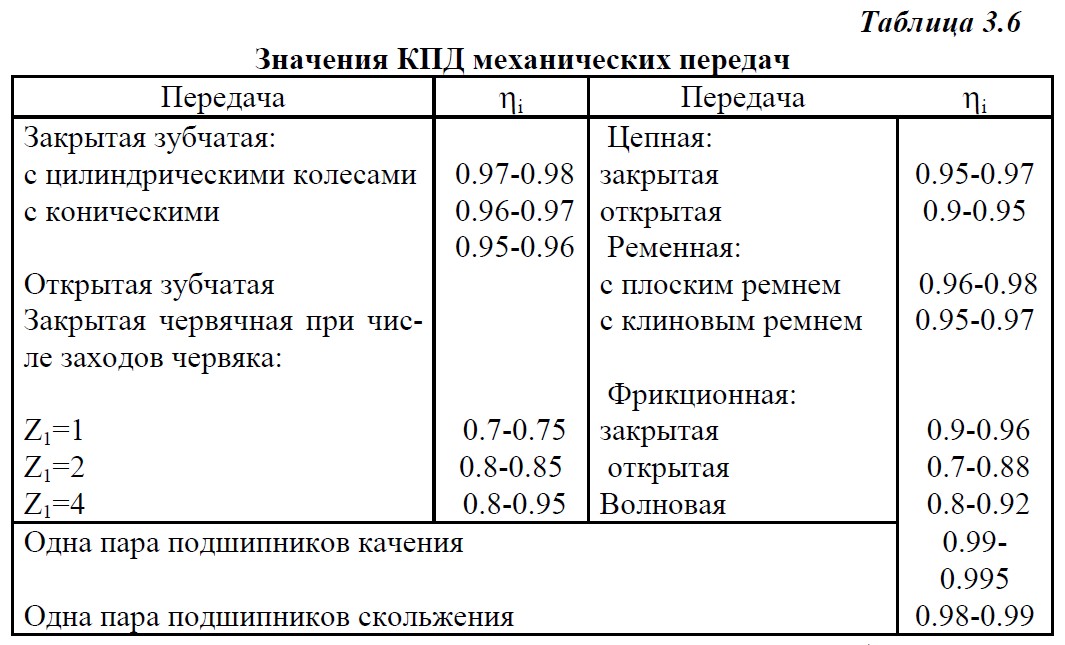
где ηпк – КПД пары подшипников качения, ηпк= 0.99; ηзп – КПД закрытой зубчатой передачи с
цилиндрическими колесами, ηзп = 0.98;
ηоп – КПД открытой зубчатой передачи, ηоп = 0,96.
𝜂пр = 0,995 ∙ 0,982 ∙ 0,96 = 0.88
Определение расчетной
мощности электродвигателя
𝑁эл = 𝑁рв   𝜂 𝜂пр
где Nрв – мощность на рабочем валу, Nрв=20 кВт; ηпр – КПД привода, ηпр=0,88.
𝑁эл = 20  0,88 = 22,7 кВт Выбор электродвигателя
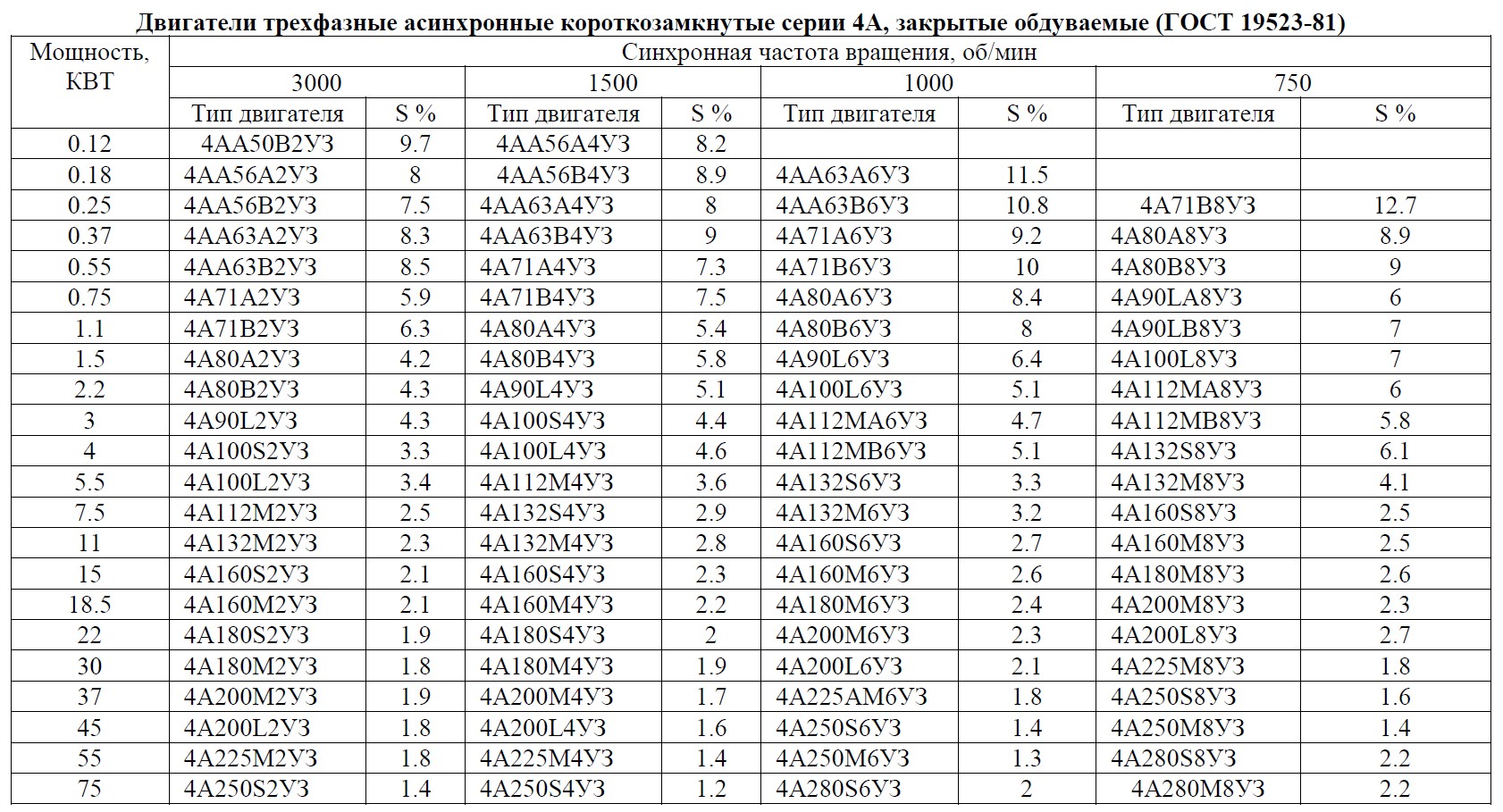
Выбираем трехфазный асинхронный короткозамкнутый электродвигатель 4А200М6У3 ГОСТ 19523-81 с параметрами:
мощность N=22 кВт;
синхронная частота вращения nс=1000 об./мин.;
номинальное скольжение S=2,3%.
Определяем с перегрузкой или недогрузкой будет работать выбранный электродвигатель.
Принимаем 22 кВт за 100%, а разницу (22.7-22) за х, тогда:
22 − 100%  0,7 − х ⇒ х = 0,7 ∙ 100  22 = 3,18% Двигатель работает с перегрузкой в 3,2%, которая менее допускаемой (5%). Электродвигатель выбран правильно.
Определение асинхронной частоты
вращения вала электродвигателя
 𝑛 ас = 𝑛 с ∙ где n с – синхронная частота вращения вала электродвигателя, n с=1000 об./мин.  S – номинальное скольжение, S=2,3%. (1.4)
𝑛ас = 1000 ∙ = 977 об./мин.
Уточнение передаточных
чисел привода
𝑈′ = 𝑛ас = 977  = 48,85 (1.5)  пр пр 𝑛 рв 20
Разбиваем передаточное число редуктора (Uр=10) на передаточные отношения первой и второй ступени. Их выбираем из стандартного ряда:
(Методичка стр. 83) «Анализ полученных по отрасли данных позволяет принять передаточные числа для цилиндрических передач: 1.0, 1.12, 1.25, 1.4, 1.6, 1.8, 2.0, 2.24, 2.5, 2.8, 3.15, 3.55, 4.0, 4.5, 5, 5.6, 6.3, 7.1, 8, 9, 10, 11.2, 12.5...».
Разбиваем передаточное число редуктора (Uр=10) на передаточные отношения первой и второй ступени.
𝑈р = 𝑈1−2 ∙ 𝑈3−4 (1.6)
Принимаем U1-2=2,5, а U3-4=4, тогда:
𝑈р = 2,5 ∙ 4 = 10
Уточняем передаточное отношение открытой зубчатой передачи.
оп
𝑈′ = ′ пр 
𝑈
𝑈р 48,85  = 10 = 10 ≈ 4,9 (1.7)
Тогда действительное передаточное отношение составит:
𝑈Д = 𝑈р ∙ 𝑈′ = 10 ∙ 4,9 = 49 (1.8) пр оп
Определение действительной
частоты вращения рабочего вала
𝑛Д = 𝑛ас = 977  = 19,9 об./мин. (1.9)
𝑈
рв Д пр
49
Определяем погрешность. Принимаем nрв=20 об./мин за 100% (частота вращения по заданию), а разницу (20-19,9) за х, тогда:
20 − 100%  0,1 − х ⇒ х = 0,1 ∙ 100  20 = 0,5% Погрешность не должна превышать 3%. Полученная частота вращения соответствует заданию.
Определение крутящих
моментов на валах
Крутящий момент определяется по формуле:
 𝑀 = 30 ∙ 𝑁эл 𝑀 = 30 ∙ 𝑁эл 𝜋 ∙ 𝑛 ас (1.10)
Тогда на быстроходном валу крутящий момент составит:
𝑀 1= 30 ∙ 22700  3,14 ∙ 977 = 221,98 ≈ 222 Н ∙ м
На промежуточном валу:
𝑀2 = 𝑀1 ∙ 𝑈1−2 ∙ 𝜂зп ∙ 𝜂пк (1.11)
𝑀2 = 222 ∙ 2,5 ∙ 0,98 ∙ 0,99 = 538,46 ≈ 538 Н ∙ м
зп
пк
𝑀3 = 𝑀2 ∙ 𝑈3−4 ∙ 𝜂2 ∙ 𝜂2 (1.12)
𝑀3 = 538 ∙ 4 ∙ 0.982 ∙ 0.992 = 2025,65 ≈ 2026 Н ∙ м
зп
пк
𝑀4 = 𝑀3 ∙ 𝑈оп ∙ 𝜂3 ∙ 𝜂5 (1.13)
𝑀4 = 2026 ∙ 4,9 ∙ 0.983 ∙ 0.995 = 8885,66 ≈ 8886 Н ∙ м
Определение частоты
вращения валов
𝑛1 = 𝑛ас = 977 об./мин. (1.14)
𝑛 2= 𝑛 1 𝑈1−2= 𝑈1−2= 977 2,5 = 390,8 об./мин. (1.15)
𝑛 3= 𝑛 2 𝑈3−4= 390,8  4 = 97,7 об./мин. (1.16) 𝑛 4= 𝑛 3 𝑈оп= 97,7 4,9 = 19,94 об./мин. (1.17) Определение угловых
скоростей валов
𝜔1= 𝑛 1 ∙ 𝜋 30 = 977 ∙ 3,14  30 = 102,2 рад./с (1.18) 𝜔2= 𝑛 2 ∙ 𝜋 30 = 390,8 ∙ 3,14  30 = 40,9 рад./с (1.19)
𝜔 3= 𝑛 3 ∙ 𝜋 30 = 97,7 ∙ 3,14  30 = 10,2 рад./с (1.20) 𝜔4= 𝑛 4 ∙ 𝜋 30 = 19,94 ∙ 3,14  30 = 2,1 рад./с (1.21)
 Полученные данные сводим в таблицу. Полученные данные сводим в таблицу.
Таблица 1.1 Кинематические параметры привода
Вал
|
n, об./мин.
|
М, Н∙м
|
ω, рад/с
| |
|
Обозн.
|
Значение
|
Обозн.
|
Значение
|
Обозн.
|
Значение
|
Быстроходный
|
n1
|
977
|
M1
|
222
|
ω1
|
102,2
|
Промежуточный
|
n2
|
390.8
|
M2
|
538
|
ω2
|
40,9
|
Тихоходный
|
n3
|
97.7
|
M3
|
2026
|
ω3
|
10,2
|
Рабочий
|
n4
|
19.94
|
M4
|
8886
|
ω4
|
2,1
| |
 Скачать 0.91 Mb.
Скачать 0.91 Mb.