Каскад.метод синтеза. Методические указания для домашней работы и срс по дисциплине Пневмогидроавтоматика в управлении оборудованием
 Скачать 1.3 Mb. Скачать 1.3 Mb.
|

|
МИНОБРНАУКИ РОССИИ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Омский государственный технический университет» К  афедра «Автоматизация и робототехника» афедра «Автоматизация и робототехника»КАСКАДНЫЙ МЕТОД СИНТЕЗА ДИСКРЕТНОЙ ПНЕВМАТИЧЕСКОЙ САУ Методические указания для домашней работы и СРС по дисциплине: «Пневмогидроавтоматика в управлении оборудованием» Омск 2014 Составители: В.В. Аристов, канд. технич. наук, доцент, В.Н. Гудинов, ст. преподаватель. В методических указаниях рассмотрена методика применения каскадного метода синтеза дискретных автоматов для проектирования пневматических систем автоматического управления. Указания содержат краткую теорию, пример синтеза и его реализацию на базе пневматических триггерных устройств. Предназначены для выполнения самостоятельной домашней работы для студентов дневного и заочного обучения по направлениям: 27.03.04 – «Управление в технических системах» и 15.03.04 – «Автоматизация технологических процессов и производств», соответственно. Дискретные конечные автоматы представляют собой широкий класс устройств различной сложности и назначения – от простейших релейных устройств типа пусковой кнопки до ЭВМ и автоматических систем управления сложнейшими технологическими процессами. Задача синтеза дискретных автоматов сводится к их построению по заданному алгоритму поведения, определяющему последовательность отработки выходных функций. Существуют различные методы синтеза дискретных автоматов в зависимости от их назначения, методов реализации и элементной базы. В данном методическом указании для лабораторной работы по дисциплине «Основы теории конечных автоматов» будет рассмотрен каскадный метод синтеза дискретных автоматов, реализуемых на базе элементов пневматического или гидравлического приводов. Пневматические и гидравлические приводы широко применяются для механизации и автоматизации производственных процессов в машиностроении, в конструкциях промышленных роботов, металлообрабатывающих станков и других технологических машин. Пневмопривод находит особо широкое применение в тех отраслях промышленности, которые относятся к взрывопожароопасным (нефтехимическая, газовая, металлургическая, пищевая, деревообрабатывающая). Реализация систем управления в пневмоприводах обычно осуществляется с применением пневматических устройств высокого давления: пневматических концевых выключателей, пневмоклапанов, пневмопределителей. Эти устройства используют для построения систем управления небольшой сложности с относительно невысоким требованием к быстродействию. Преимуществом таких систем является управление исполнительными механизмами без промежуточного усиления командных сигналов, простота наладки и обслуживания. Цель работы – освоение студентами принципов каскадного метода синтеза дискретных автоматов и использования его для задач проектирования автоматов на базе элементов пневмопривода, а также приобретение навыка практического моделирования и отладки этих систем в среде FluidSim-P Понятие дискретного автомата Дискретный автомат можно охарактеризовать как устройство, имеющее входной и выходной каналы и находящееся в каждый из дискретных моментов времени, называемых тактовыми моментами τv или просто тактами, в одном из некоторого множества состояний. Если множество состояний автомата конечно, то он называется конечным. Предполагается, что в каждом из состояний автомат воспринимает на входном канале сигналы, которые будем называть входными переменными, и на выходном канале формирует сигналы, называемые выходными переменными. При этом входные и выходные переменные также являются дискретными величинами и принимают значения из конечных множеств. Таким образом, автомат можно задать: А = {X, Y, Q}, где X –множество входных сигналов; Y – множество выходных сигналов; Q –множество внутренних состояний. Различают комбинационныеи последовательностные автоматы. Для комбинационных автоматов характерно то, что каждая совокупность состояний выходов однозначно определяется одним или несколькими состояниями входных переменных. При этом каждая выходная функция задается определенной комбинацией входов, yv= λ(xv ). Такие автоматы еще называют тривиальными, они имеют лишь одно внутреннее состояние. В последовательностных автоматах выходные переменные могут зависеть от состояния входных переменных не только в данный тактовый момент, но от их предистории, т.е. от последовательности их поступления. Для таких автоматов характерно наличие памяти. Совокупность элементов памяти определяет внутренние состояния такого автомата. При этом, каждому внутреннему состоянию соответствует своя комбинационная часть, где состояние выходов однозначно определяется состоянием входов. В этом случае выходная функция определяется не только состоянием входных переменных, но и внутренним состоянием автоматаqv, yv= λ (qv, xv ). При схемотехнической реализации последовательностных автоматов в качестве элементов памяти зачастую используют триггерные устройства, обладающие устойчивым состоянием выходов. В микропроцессорных схемах наиболее широкое применение находит асинхронный RS-триггер. В простейшем своем исполнении он имеет два выхода: прямой – Q и инверсный – 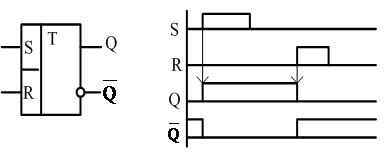 Рис. 1. RS-триггер и его временная диаграмма Наличие двух устойчивых выходных состояния триггера позволяет моделировать соответственно два внутренних состояния дискретного автомата. При большем количестве внутренних состояний предполагается использование дополнительного количества триггеров, обеспечивающих последовательное включение и выключение комбинационных участков схемы управления, т.е. внутренних состояний автомата. В пневматических и гидравлических схемах роль триггеров часто исполняют двухпозиционные распределители с двусторонним управлением, также имеющие два устойчивых состояния, определенные каждой позицией распределителя (рис. 2).  Рис. 2. Пневмораспределитель 4/2 с двусторонним управлением Принцип работы и временная диаграмма переключения каналов такого распределителя аналогичны RS-триггеру. Анализ и синтез дискретного автомата Задача синтеза дискретных конечных автоматов сводится к их построению по заданному алгоритму работы и поведению вход–выход. Для решения этой задачи сначала требуется произвести анализ технологического устройства, управляемого автоматом с определением количества и типа силовых рабочих органов, исполнительных механизмов (выходов) и датчиков контроля положения рабочих органов (входов). Суть каскадного метода синтеза дискретного автомата заключается в том, что он разбивается на тривиальные (комбинационные) автоматы – каскады, определяющие внутренние состояния автомата. В каждом каскаде выходной сигнал однозначно определяется состоянием той или иной существенной входной переменной (существенной входной переменной будем называть тот вход, изменение состояния которого непосредственно меняет состояние данного выхода). Переход от одного внутреннего состояния в другое (переключение каскадов) также определяется изменением состояния соответствующей существенной переменной на входном канале автомата. Порядок синтеза рассмотрим на примере построения дискретного автомата управления разгрузочно-загрузочного устройства для токарного станка, функциональная схема которого представлении на рис. 3. Он включает в себя несколько этапов: 1. Изучается объект автоматизации (конструкция, назначение, цель автоматизации) и его функциональная схема. Определяется тип и количество силовых механизмов и датчиков положения. Производится их кодирование (как правило, буквами латинского алфавита).  Рис. 3. Функциональная схема разгрузочно-загрузочного устройства Устройство состоит из четырех силовых элементов: А – пневмоцилиндр оператора разгрузки; D – пневмомембрана привода зажима заготовки; В – пневмоцилиндр оператора загрузки; С – пневмоцилиндр толкателя. Контроль перемещений силовых механизмов осуществляется путевым методом с помощью концевых датчиков: a1, a2, b1, b2, c1, c2, d1, d2. Управление возвратно-поступательным перемещением каждого из силовых органов устройства осуществляется с помощью двухпозиционных четырехканальных распределителей с двусторонним пневматическим управлением, на которые подаются выходные сигналы управления, например для пневмоцилиндра А: 2. Определяется исходное положение всех исполнительных механизмов, анализируется последовательность функционирования его силовых органов. В нашем примере в начальном состоянии устройства механизм зажима D включен, а остальные пневмоцилиндры (А, В, С) находятся в исходном положении. При этом включены путевые датчики a1, b1, c1, d2. Последовательность срабатывания силовых элементов устройства задается следующим алгоритмом: где прямой операнд (например А) обозначает рабочий ход силового устройства (поршня пневмоцилиндра А), а инверсный операнд (  Рис. 4. Пневмосхема исполнительного механизма. 3. Записываются условия работы автомата (словесное описание, таблица состояний, циклограмма, граф функционирования). В нашем примере граф функционирования автомата будет иметь следующий вид:  4. По графу функционирования автомат разбивается на каскады (тривиальные автоматы) так, чтобы в каждом каскаде любой из механизмов не совершал полного цикла двойного хода. В нашем примере таких каскадов будет три.  Здесь на ребрах графа опускаем несущественные переменные, поскольку они не используются в процессе синтеза. Оставляем только существенные переменные, непосредственно определяющие изменение состояния исполнительных механизмов. 5. Производится компоновка структурной схемы логического переключателя каскадов (рис. 5). Логический переход от одного каскада к следующему осуществляется переключением состояния пневматических триггеров через соответствующую существенную переменную, которая включается в конце отработанного каскада. Это обеспечивает последовательную подачу сжатого воздуха в каждую группу конечных пневмопереключателей и в каналы управления триггеров.  Рис. 5. Структурная и пневматическая схемы логического преобразователя 6. В соответствии с условием работы автомата строится полная структурная схема (рис. 6).  Рис. 6. Структурная схема системы управления. 7. На основании структурной строится пневматическая принципиальная схема системы управления (рис. 15) с использованием элементов пневмоавтоматики высокого давления. В качестве основных и вспомогательных распределителей применяются 2-х позиционные 4-х канальные пневмораспределители с двусторонним пневматическим управлением. В качестве конечных переключателей используются 2-х позиционные 3-х канальные пневмораспределители с односторонним механическим управлением. Пневматическая принципиальная схема строится с помощью программного пакета FluidSim-P фирмы «FESTO». Система автоматизированного проектирования пневматических систем FluidSim-P Программный пакет FluidSim-P предназначен для проектирования и моделирования пневматических схем, а также является мощным средством интерактивного обучения. FluidSim-P имеет следующие основные возможности: разработка принципиальных пневматических схем; поддержка библиотеки условных графических обозначений элементов пневмосхем; проверка работоспособности спроектированных схем; моделирование работы пневмосистем; построение диаграмм работы системы; изучение принципа работы пневмосистем и их отдельных элементов. Работа начинается с создания нового проекта в программе управления проектами. Описание работы с пакетом FluidSim-P Запустите программу FluidSim-P с помощью ярлыка Fl_sim_p.exe на рабочем столе компьютера, через меню Пуск, или открыв папку ProgramFiles /FestoDidactic. После запуска появится главное окно программы (рис. 7). В этом окне слева расположена библиотека компонентов FluidSim-Р, которая состоит из пневмоэлементов, электрических элементов и элементов для построения циклограмм работы. В окне имеется стандартная панель быстрого доступа, как и во всех приложениях Windows, которая содержит стандартные и специальные опции: Используя кнопки 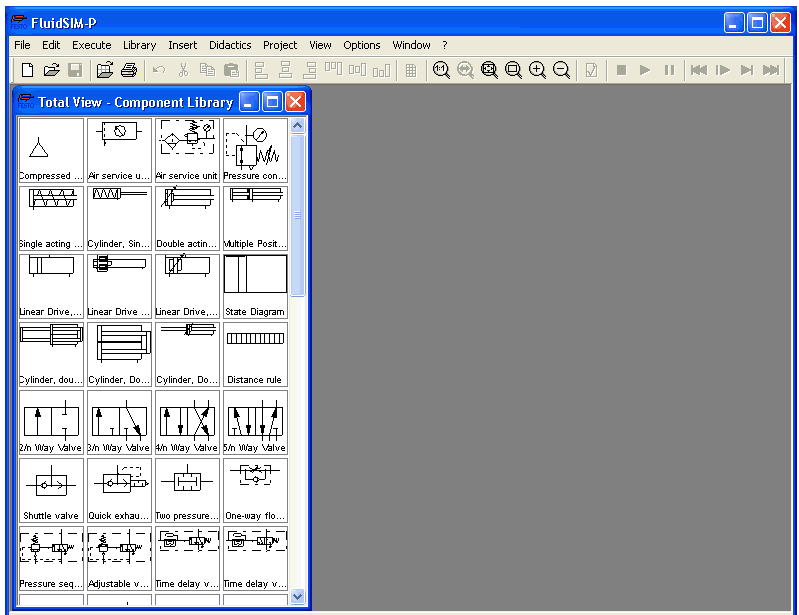 Рис. 7. Главное окно FluidSim-Р Опции В режиме эмуляции используются стандартные опции Создание нового проекта Для создания нового проекта используется кнопка (рис. 8). Для поиска нужных элементов в окне библиотеки используется прокрутка, как и во всех приложениях Windows. Для того чтобы перенести элемент из библиотеки в окно проекта, необходимо «кликнуть» выбранный элемент и, удерживая правую клавишу мыши, перетащить его в окно проекта. 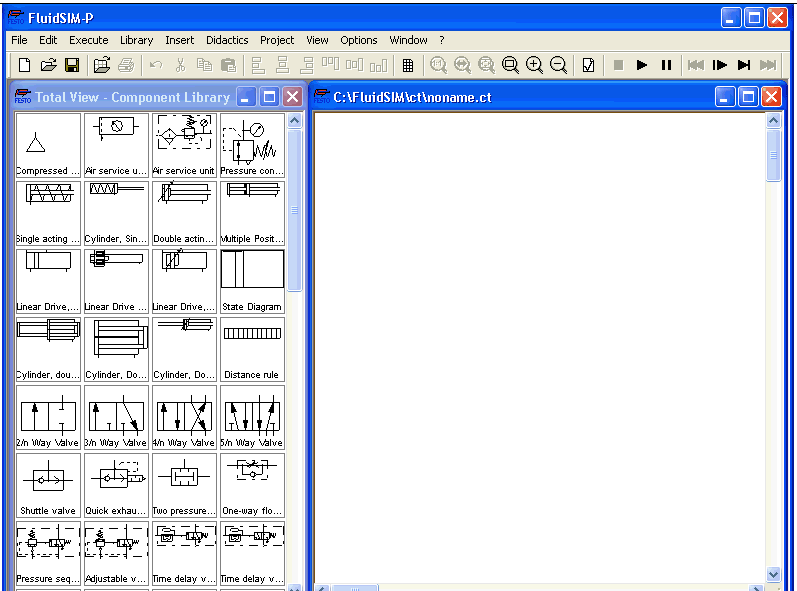 Рис. 8. Новое окно проекта Переместите курсор мыши в библиотеку элементов, например на цилиндр. Удерживая левую кнопку мыши (появится значок 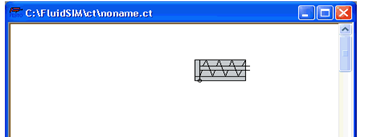 Рис. 9. Перенос элемента в окно проекта Таким же образом переносятся и другие элементы из библиотеки в окно проекта. Нажав на элемент, перенесенный в поле проекта, правой кнопкой мыши, с помощью пункта меню Properties (Свойства) можно посмотреть и изменить свойства элемента. Например, при выборе распределителя (рис. 10) можно изменить следующие его свойства:  Рис. 10. Свойства распределителя Left/Right Actuation. С помощью этих пунктов можно определить принцип управления распределителем. Можно выбрать любой из способов управления: с возвратной пружиной (Spring-returned), пилотный (Piloted), ручной (Manually), механический (Mechanically), пневматический (Pneumatically) или электрический (Electrically). Description. Здесь вводится название распределителя, которое потом будет использоваться в диаграмме состояний и спецификации. Valve Body. Можно сконфигурировать распределитель, выбрав количество позиций и каналов. Initial Position. Здесь выбирается, какое из положений распределителя будет начальным. Таким образом можно менять свойства всех элементов в библиотеке компонентов. Для фиксации крайних положений пневмоцилиндра используются метки датчиков положения. Для их создания необходимо, нажав правой кнопкой мыши на цилиндр, открыть меню Propeties и нажать кнопку Edit Labels. Появится окно для создания меток, где необходимо ввести их названия и параметры позиций (рис. 11). После того как в окно проекта перенесены все элементы, из которых будет состоять схема, их следует соединить магистралями. Для этого нужно навести курсор мыши на точку соединения элемента так, чтобы появился значок – «оптический прицел» 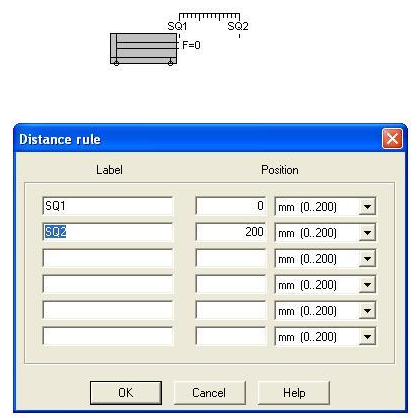 Рис. 11. Создание меток  Рис. 12. Проведение линий связи Чтобы удалить линию связи, необходимо навести на нее курсор мыши и, при появлении символа   Рис. 13. Удаление линий связи Рис. 14. Проверка работоспособности схемы Чтобы остановить работу, используют кнопку Порядок выполнения работы 1. Изучить основные положения теории синтеза автоматов. 2. Произвести анализ и синтез дискретного автомата каскадным методом по варианту из табл. 1, выданному преподавателем, построить структурную схему дискретной системы управления. 3. С использованием программного пакета FluidSim-P построить принципиальную схему дискретного автомата на базе пневматических элементов (рис. 15). Проверить работу автомата в режиме эмуляции, распечатать принципиальную пневматическую схему и представить преподавателю. 4.Составить отчет по лабораторной работе. Содержание отчета Титульный лист. Вариант алгоритма работы автомата. Циклограмма и граф функционирования автомата. Структурная схема автомата. Пневматическая принципиальная схема. 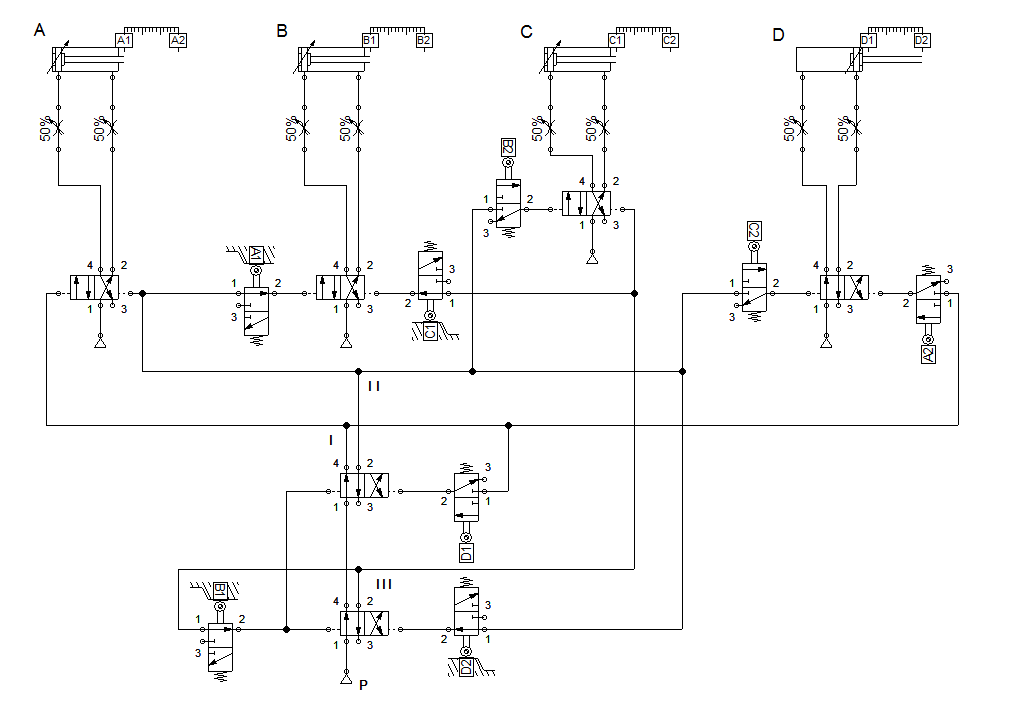 Рис. 15. Пневматическая принципиальная схема Варианты Таблица 1
Литература Наземцев А.С. Гидравлические и пневматические системы. Часть 1. Пневматические приводы и средства автоматизации: Учебное пособие. – М.: Форум, 2004. – 240 с. Исследование типовых схем пневмоприводов на базе элементов фирмы FESTO: метод. указ. к лаб. раб. / Н.Г. Скабкин, В.В. Клевакин, И.В. Лазаренко. – Омск: Издат-во ОмГТУ, 2011. 38 с. Пневматические цикловые системы управления: метод. указ. к лаб. раб. и УИРС / В.Н. Гудинов, Н.Г. Скабкин – Омск: ОмПИ, 1986. – 12 с. |