Лабораторные. ЛР_САУЭП_ГЭТ_2020. Методические указания для проведения лабораторных работ по учебной дисциплине системы автоматического управления электроприводами
 Скачать 3.51 Mb. Скачать 3.51 Mb.
|

|
4.2 Расчет сопротивления пускового резистора Сопротивление резистора R7, Ом, рассчитывается по формуле Кратность λ пускового тока к току переключения равна Значения токов I1 и I2 определяются по формулам (3.1) и (3.2). Статический ток принять равным Iс = 0,14 А. Для построения графиков зависимостей ω = f(I), ω= f(t), I= f(t) необходимо рассчитать следующие величины: 1) скорость ω1, рад/с, при которой происходит переход двигателя с искусственной электромеханической характеристики на естественную по формуле 2) установившееся значение скорости двигателя ωс по формуле (1.13); 3) время разгона t1 двигателя по искусственной электромеханической характеристике (с сопротивлением R7) по формуле (1.15); 4) время разгона tу двигателя от нулевого значения скорости до установившегося по формуле (1.19). 5 Содержание отчета 5.1 Название лабораторной работы и ее цели. 5.2 Схема электрическая принципиальная пуска ДПТ ПВ в функции тока. Краткое описание работы данной схемы. 5.3 Расчет значений величин I1, I2, ω1, ωс, t1, tу, R7. 5.4 Таблица 3.1, заполненная по результатам расчетов и опытов. 5.5 Графики зависимостей ω = f(I), ω = f(t), I = f(t) для расчетных данных. 5.6 Выводы о проделанной работе. 6 Контрольные вопросы 6.1 Объясните особенности пуска ДПТ в функции тока. 6.2 Назовите область применения схемы пуска ДПТ в функции тока. 6.3 Перечислите достоинства и недостатки схемы пуска ДПТ в функции тока. 6.4 Поясните принцип действия реле минимального тока. Литература 1 Гульков, Г. И. Системы автоматического управления электроприводами : учеб. пособие / Г. И. Гульков, Ю. Н. Петренко, Т. В. Бачило; под общ. ред. Ю. Н. Петренко. – Минск : ИВЦ Минфина, 2014. 2 Москаленко, В. В. Системы автоматизированного управления электропривода : учебник / В. В. Москаленко. – М. : Инфра-М , 2004. 3 Системы автоматизированного управления электроприводами : учеб. пособие / Под общ. ред. Ю. Н. Петренко. – Минск : ООО «Новое знание», 2004. Лабораторная работа №4 Исследование процесса торможения двигателя постоянного тока параллельного возбуждения 1 Цели работы: изучить основные способы и схемы торможения ДПТ научиться рассчитывать величину тормозного резистора при динамическом торможении и торможении противовключением ДПТ ПВ, необходимую выдержку реле времени для осуществления торможения до полной остановки двигателя в функции времени приобрести навыки в сборке и настройке схем торможения изучить безопасные методы работы на лабораторном стенде 2 Оборудование рабочего места: лабораторный стенд методические указания для проведения лабораторных работ тестер 3 Порядок выполнения работы 3.1 Схема динамического торможения ДПТ ПВ в функции ЭДС. 3.1.1 Изучите принцип работы схемы динамического торможения ДПТ ПВ в функции ЭДС (рисунок 4.1). 3.1.2 Используя паспортные данные двигателя (приложение А), рассчитайте величину тормозного сопротивления Rдт для обеспечения допустимого тормозного тока Iдоп = 0,5 А. 3.1.3 С помощью ручки Rт на лицевой панели и тестера установите расчётное значение сопротивления Rт = Rдт. 3.1.4 Соберите схему согласно рисунку 4.1. Кнопкой S11 осуществите пуск двигателя М1. Кнопкой «сброс» на панели установите секундомер в «ноль». Кнопкой S10 остановите двигатель. С помощью секундомера, амперметра РА1 и измерителя частоты вращения Рω снимите зависимости I = f(t), ω=f(t) после нажатия кнопки S10. 3.2 Схема динамического торможения ДПТ ПВ в функции времени. 3.2.1 Изучите принцип работы схемы динамического торможения ДПТ ПВ в функции времени (рисунок 4.2). 3.2.2 Используя паспортные данные двигателя рассчитайте необходимую выдержку tдт реле времени К9 для осуществления торможения двигателя до полной остановки. 3.2.3 Соберите схему согласно рисунку 4.3 и производя пробные пуски кнопкой S11, измеряя каждый раз секундомером время срабатывания реле К9, с помощью соответствующего резистора на лицевой панели, подберите расчётное время срабатывания реле времени К9. 3.2.4 Тестером установите рассчитанное в п. 3.1.2 значение Rт= Rдт. 3.2.5 Соберите схему согласно рисунку 4.2 и кнопкой S11 осуществите пуск ДПТ, а кнопкой S10 его останов. С помощью секундомера, амперметра РА1 и измерителя частоты вращения Рω снимите зависимости I = f(t), ω = f(t). 3.3 Схема торможения ДПТ ПВ противовключнием. 3.3.1 Изучите принцип работы схемы торможения ДПТ ПВ противовключнием (рисунок 4.4). 3.3.2 Задайтесь допустимым тормозным током якоря в момент противовключения Iдоп = 2,5 А и рассчитайте величину сопротивления тормозного резистора R9. 3.3.3 Используя паспортные данные двигателя рассчитайте время tтп его торможения в режиме противовключения. 3.3.4 Соберите схему согласно рисунку 4.4. Кнопкой S11 осуществите пуск двигателя. Кнопкой S10 остановите ДПТ. В процессе торможения снимите зависимости I = f(t) и ω = f(t). 3.4 Результаты опытов. Для каждой схемы торможения ДПТ ПВ результаты опыта заносятся в отдельную таблицу (таблица 4.1). Таблица 4.1 – Результаты опыта
4 Теоретические сведения 4.1 Основные способы торможения ДПТ ПВ После отключения ДПТ от источника электропитания якорь двигателя некоторое время продолжает вращаться по инерции, за счет запасенной кинетической энергии. Часто требуется быстро и точно остановить вращаемый двигателем механизм или изменить направление его вращения. Торможение электродвигателей может быть произведено как с помощью механических тормозов, так и электрически, что предпочтительнее. Для быстрого торможения двигателя его переводят в режим, в котором электромагнитный момент становится тормозящим для якоря, т.е. когда момент и скорость направлены встречно. При этом механическая энергия вращения преобразуется в электрическую, рассеиваемую в виде тепла в резисторах цепи якоря или отдается в сеть. Различают три вида торможения ДПТ ПВ: 1) динамическое; 2) противовключением; 3) рекуперативное. 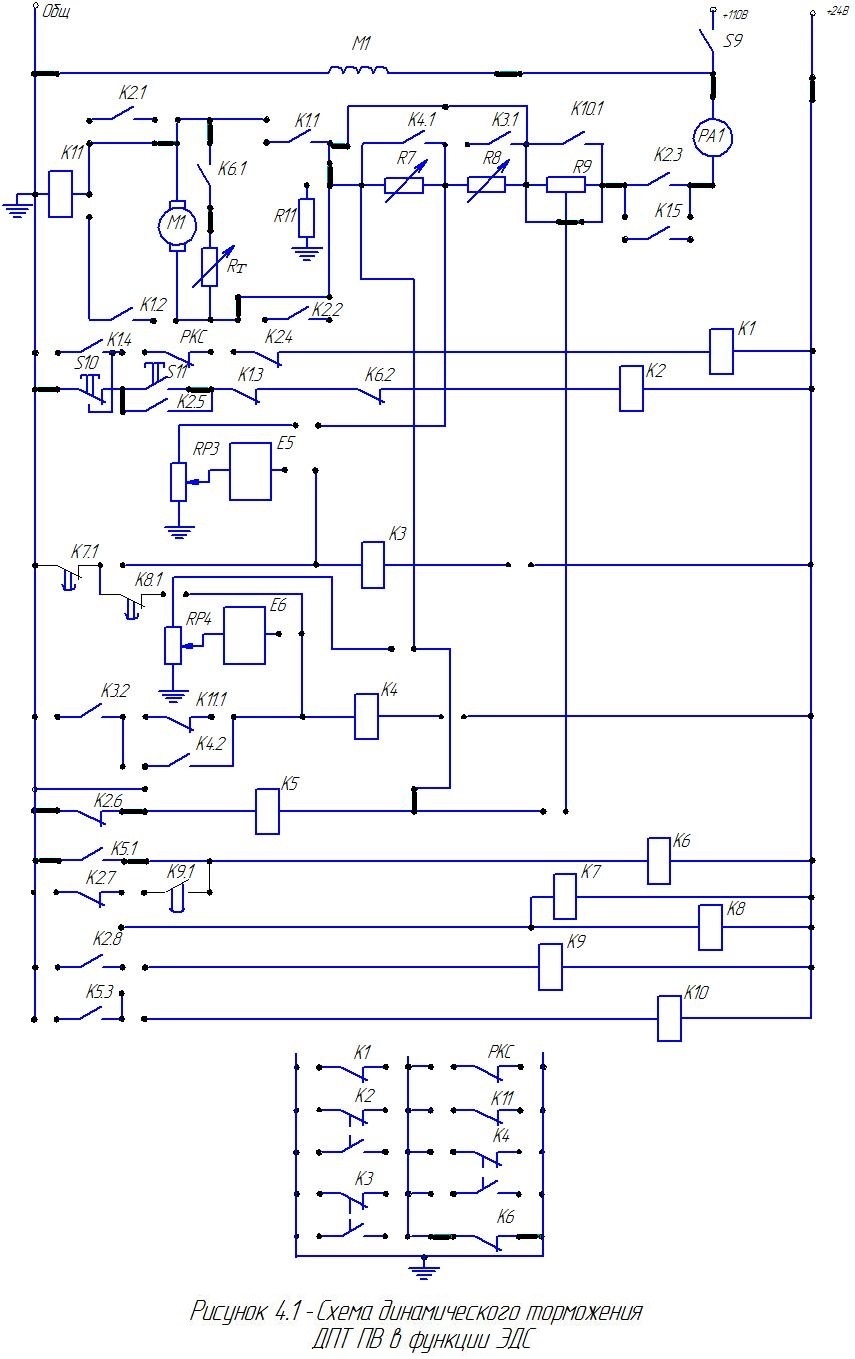 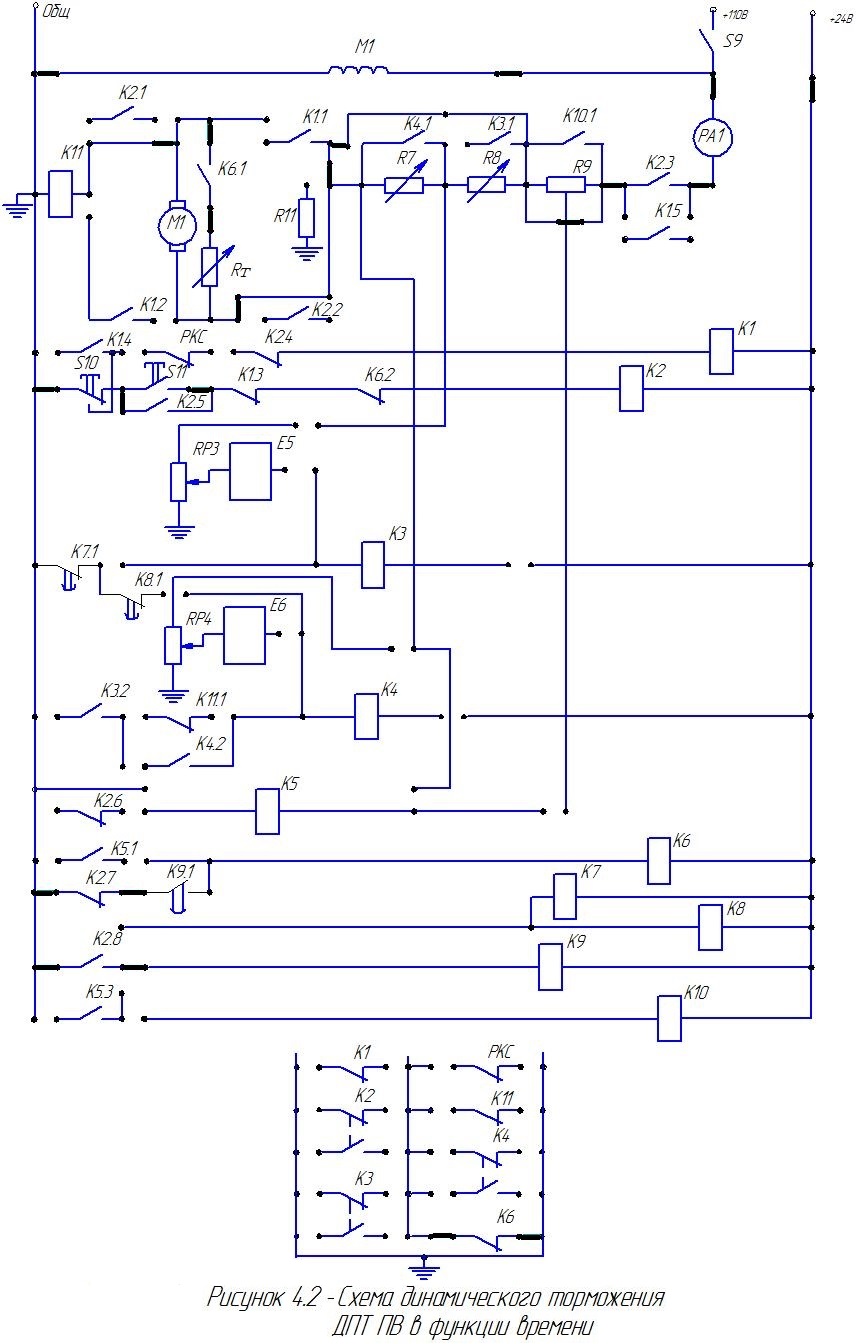 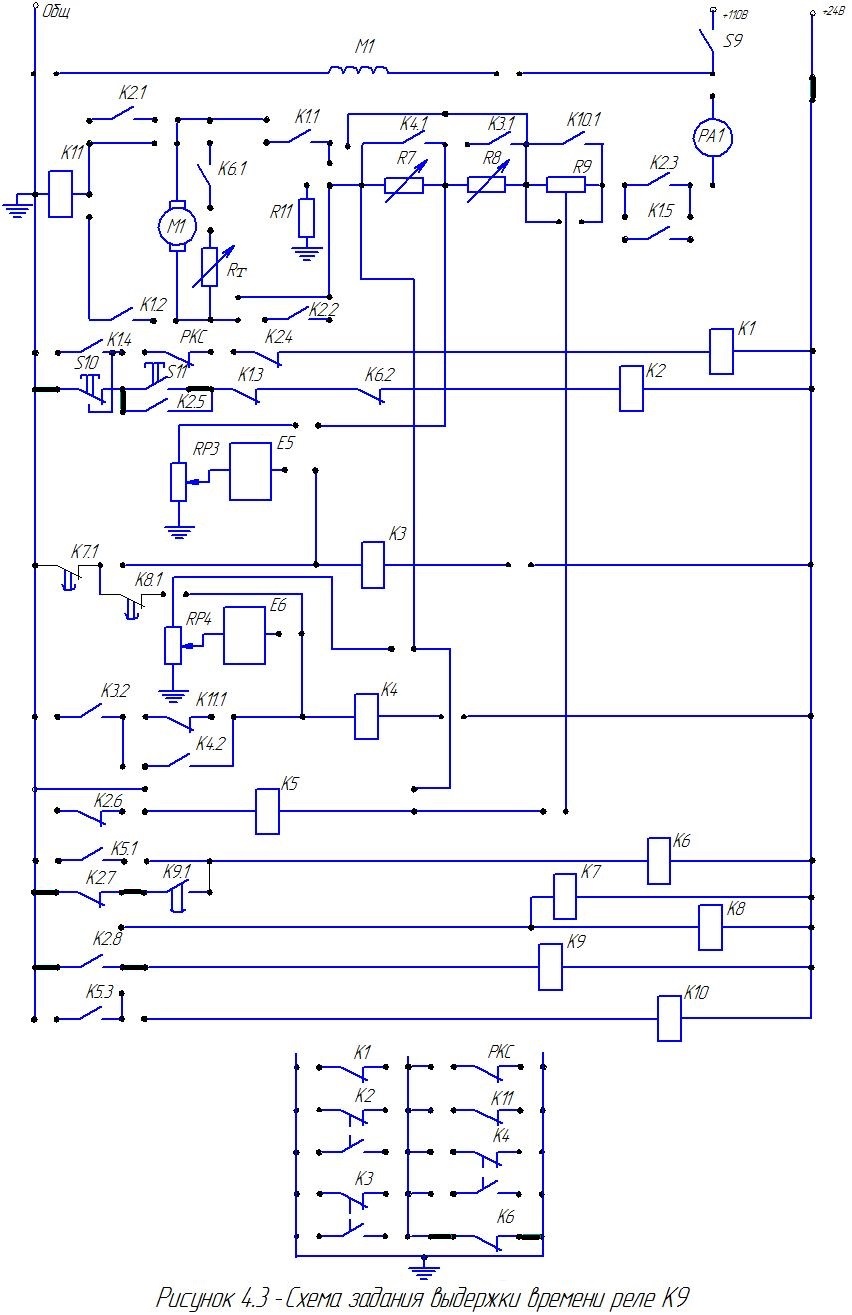 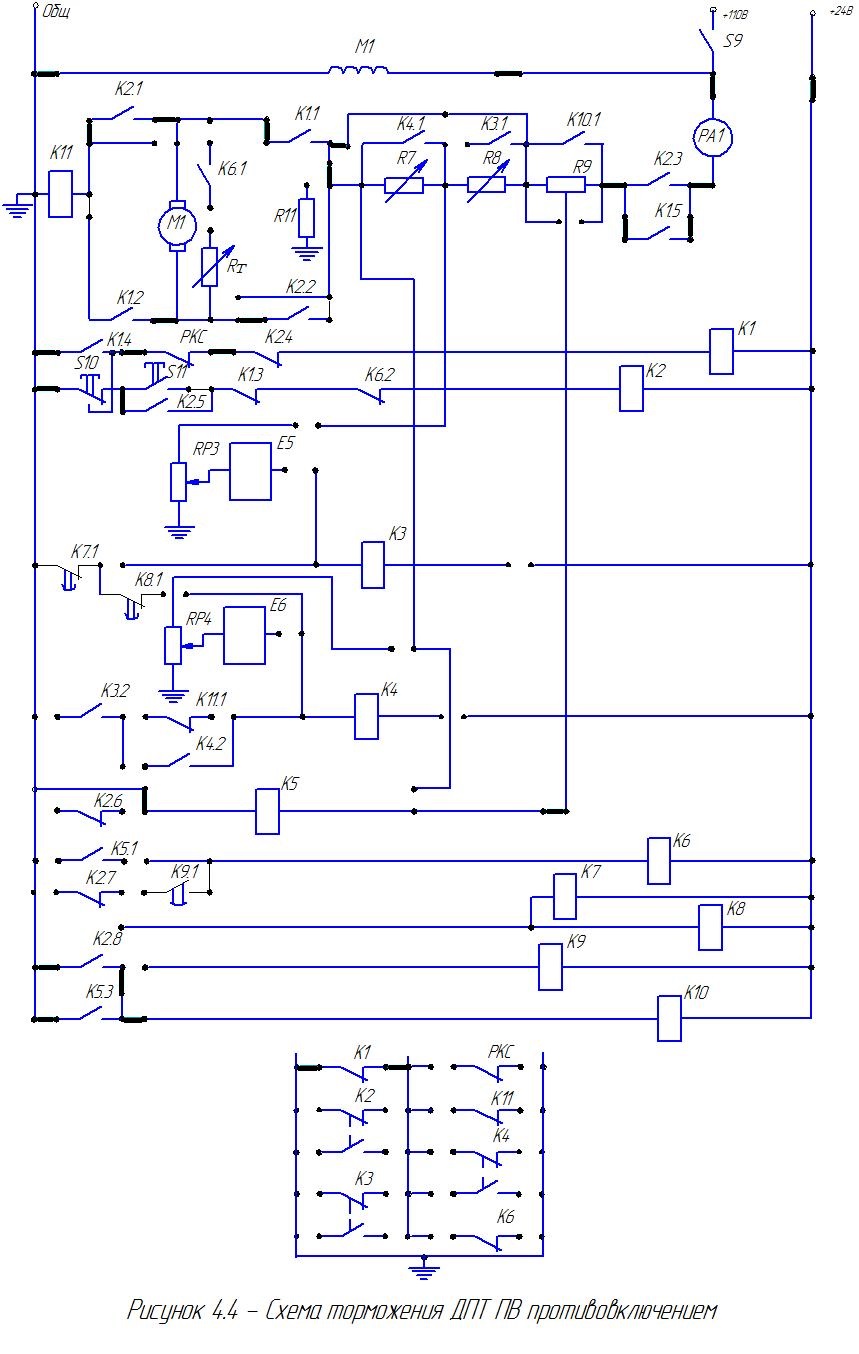 4.2 Динамическое торможение ДПТ ПВ При динамическом торможении обмотку вращающегося якоря ДПТ ПВ отключают от сети и замыкают на тормозной резистор Rдт. Цепь возбуждения при этом остается подключенной к источнику питания. Под воздействием ЭДС ток якоря изменяет направление, и генераторный электромагнитный момент тормозит вращение якоря до остановки. Вместе со снижением скорости уменьшаются ЭДС, ток и момент двигателя. Величину сопротивления тормозного резистора Rдт, Ом, при динамическом торможении можно рассчитать по формуле где Ет – ЭДС якоря в начальный момент торможения, В; Iдоп – допустимый тормозной ток якоря двигателя, А; Rя – сопротивление якоря, Ом. Процесс перехода ДПТ ПВ с естественной механической характеристики 1 в двигательном режиме на характеристику 2 динамического торможения показан на рисунке 4.5. 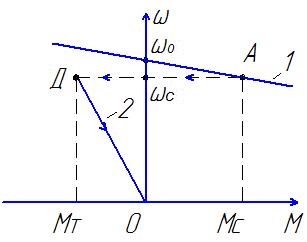 Рисунок 4.5 – Механические характеристики ДПТ ПВ в двигательном режиме и динамического торможения Наклон характеристики динамического торможения (отрезок Д0) определяется суммарным сопротивлением цепи якоря (Rя + Rдт). Динамическое торможение отличается простотой, плавностью и надежностью. Такое торможение можно осуществить в функции ЭДС и в функции времени. 4.3 Торможение ДПТ ПВ в функции времени Торможение ДПТ ПВ в функции времени является одним из способов динамического торможения. Для осуществления данного принципа в схеме динамического торможения применяется электромагнитное реле времени. Торможение двигателя в функции времени будет происходить до полной остановки, в отличие от торможения в функции ЭДС. Время торможения двигателя в функции времени определяется величиной выдержки реле времени. Выдержку tдт, с, реле времени, необходимую при динамическом торможении двигателя до полной остановки, можно рассчитать по формуле где Тм – электромеханическая постоянная времени, с; ωнач – угловая скорость двигателя в начальный момент торможения, рад/с; Δωс – перепад угловой скорости относительно скорости идеального холостого хода ω0 при нагрузке двигателя моментом Мс, рад/с. Принимаем ωнач = ωс (определяется по формуле (1.13)). Величины Тм и Δωс определяются из следующих выражений где с – конструктивная постоянная двигателя, В·с/рад. Конструктивная постоянная двигателя рассчитывается по формуле (1.9). Время торможения двигателя tтп, с, в режиме противовключения определяется по формуле 4.4 Торможение ДПТ ПВ противовключением Торможение противовключением широко применяется для двигателей постоянного тока, особенно в случае реверсивных электроприводов, где вслед за торможением производится пуск двигателя в обратном направлении. Перевод ДПТ ПВ в режим торможения противовключением осуществляется изменением полярности напряжения обмотки якоря, за счет переключения тока во вращающемся якоре на обратное направление протекания. С током меняет знак и момент, становясь тормозящим. Ток в якоре Iя будет совпадать по направлению с напряжением Uн и ЭДС Ет и определяться их суммарным действием Для ограничения тока при противовключении вводят в цепь якоря тормозной резистор Rтп. После завершения процесса торможения он закорачивается контактором противовключения. Величину сопротивления тормозного резистора Rтп, Ом, при торможении противовключением (реверсе) можно рассчитать по формуле Рассмотрим механические характеристики ДПТ НВ в двигательном режиме и при торможении противовключением (рисунок 4.6). 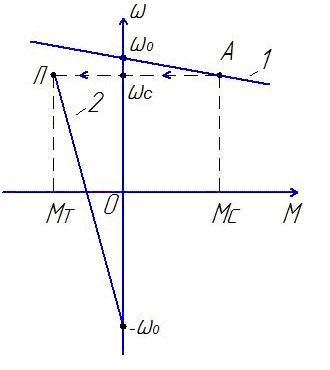 Рисунок 4.6 – Механические характеристики ДПТ ПВ в двигательном режиме и при торможении противовключением Пусть двигатель вращается под нагрузкой Мс со скоростью ωс в точке А на естественной механической характеристике 1. Переключение тока якоря с прямого направления протекания на обратное (с введением тормозного резистора Rтп) переводит двигатель в точку П механической характеристики 2 с той же скоростью ωс, так как из-за инерции она не может изменится мгновенно. Теперь на якорь действует тормозящий момент Мт, скорость быстро падает до нуля. Отрезок П0 представляет собой участок торможения ДПТ ПВ противовключением. Наклон характеристики торможения противовключением определяется суммарным сопротивлением цепи якоря (Rя + Rтп). Если двигатель не отключить, то из точки 0 он начнет разгон в обратном направлении по характеристике 2, что будет соответствовать режиму реверса ДПТ. 4.5 Принцип работы схемы динамического торможения ДПТ ПВ в функции ЭДС Для подачи напряжения питания на обмотки якоря и возбуждения двигателя М1 необходимо включить тумблер S9 (рисунок 4.1). Для запуска двигателя нажимается кнопка S11 «Пуск». Срабатывает контактор К2, двигатель подключается к источнику питания силовым контактом К2.3 и начинает свой разгон, а кнопка S11 шунтируется контактом К2.5 При равенстве электромагнитного и статического моментов наступает установившийся режим работы ДПТ ПВ. Для торможения двигателя нажимается кнопка S10 «Стоп». Контактор К2 теряет питание и своим замыкающим контактом К2.3 отключает обмотку якоря от источника напряжения. В это же время замыкается контакт К2.6 и получает питание катушка реле напряжения К5, которое своим контактом К5.1 замыкает цепь питания контактора торможения К6. Вследствие этого замыкается контакт К6.1 и обмотка якоря двигателя оказывается подключенной к тормозному резистору Rт. Начинается динамическое торможение ДПТ ПВ, по мере которого происходит уменьшение скорости двигателя, а, следовательно, и его ЭДС. При ЭДС двигателя меньшей напряжения удержания реле К5 происходит размыкание контакта К5.1, что приводит к потере питания катушки К6, отключению двигателя от тормозного резистора Rт и его останову. 4.6 Принцип работы схемы динамического торможения ДПТ ПВ в функции времени Подача напряжения питания на обмотки якоря М1 и возбуждения M1 двигателя осуществляется тумблером S9 (рисунок 4.2). Для запуска двигателя нажимается кнопка S11 «Пуск». Срабатывает контактор К2, двигатель подключается к источнику питания силовым контактом К2.3 и начинает свой разгон, а катушка контактора К2 становится на самопитание своим контактом К2.5. В это же время замыкание контакта К2.8 приводит к включению реле времени К9, которое замыкает свой замыкающий контакт К9.1 в цепи питания контактора торможения К6. Однако катушка К6 не получает питания, так как контакт К2.7 разомкнут. Для торможения двигателя нажимается кнопка S10 «Стоп». Катушка контактора К2 теряет питание и своим замыкающим контактом К2.3 отключает обмотку якоря М1 от источника питания. В это же время замыкается контакт К2.7 и получает питание контактор торможения К6. Вследствие этого замыкается контакт К6.1 и обмотка якоря двигателя оказывается подключенной к тормозному резистору Rт. Через время, равное выдержке времени реле К9, контакт К9.1 разомкнется, катушка контактора К6 потеряет питание. Контакт К6.1 разомкнется, двигатель отключится от тормозного резистора Rт и остановится. Схема вернется в исходное состояние. 4.7 Принцип работы схемы торможения ДПТ ПВ противовключением Рассмотрим схему, представленную на рисунке 4.4. Включением тумблера S9 подается напряжение питания на обмотки якоря и возбуждения двигателя М1. Для разгона двигателя нажимается кнопка S11 «Пуск». Срабатывает контактор К2, двигатель подключается к источнику питания силовыми контактами К2.1, К2.2, К2.3 и начинает свой разгон. Контакт К2.8 замыкает цепь питания катушки контактора К10, который своим контактом К10.1 шунтирует тормозной резистор R9. При равенстве электромагнитного и статического моментов наступает установившийся режим работы ДПТ ПВ. Для останова двигателя нажимается кнопка S10 «Стоп». Контактор К2 отключается, размыкая контакты К2.1, К2.2, К2.3, К2.5, К2.8 и замыкая контакт К2.4. Нажатие кнопки S10 приводит к включению контактора К1, который замыкает свои контакты К1.1, К1.2, К1.4, К1.5 и размыкает контакт К1.3. Напряжение питания, прикладываемое к обмотке якоря двигателя изменяет свою полярность и он переходит в режим торможения противовключением с тормозным резистором R9 в цепи якоря, которое расшунтировано контактом К10.1. По мере уменьшения скорости вращения двигателя, срабатывает реле К5, включая пускатель К10, который шунтирует резистор R9. Это приводит к уменьшению тормозного тока, а, следовательно, и тормозного момента. При скорости вращения близкой к нулю, срабатывает реле контроля скорости РКС и отключает питание катушки контактора К1 и обмотки якоря М1. Схема возвращается в исходное состояние. 5 Содержание отчета 5.1 Название лабораторной работы и ее цель. 5.2 Схемы электрические принципиальные торможения ДПТ ПВ в функции ЭДС, времени и торможения противовключением. Краткое описание работы данных схем. 5.3 Расчет величины сопротивления резистора Rт. 5.4 Расчет выдержки времени реле К9 для осуществления динамического торможения ДПТ ПВ в функции времени. 5.5 Расчет величины сопротивления резистора R9 для режима торможения противовключением. 5.6 Графики зависимостей ω = f(t), I = f(t) для всех схем торможения ДПТ. 5.7 Выводы о проделанной работе. 6 Контрольные вопросы 6.1 Перечислите виды торможения ДПТ ПВ. 6.2 Объясните принцип динамического торможения ДПТ ПВ. 6.3 Объясните принцип торможения ДПТ ПВ противовключением. 6.4 Приведите формулу для расчета сопротивления тормозного резистора для режима динамического торможения и противовключения. 6.5 Объясните принцип работы схем динамического торможения ДПТ ПВ в функции времени и ЭДС. Приведите соответствующие механические характеристики. 6.6 Объясните принцип работы схемы торможения ДПТ ПВ противовключением. Приведите соответствующие механические характеристики. Литература 1 Гульков, Г. И. Системы автоматического управления электроприводами : учеб. пособие / Г. И. Гульков, Ю. Н. Петренко, Т. В. Бачило; под общ. ред. Ю. Н. Петренко. – Минск : ИВЦ Минфина, 2014. 2 Москаленко, В. В. Системы автоматизированного управления электропривода : учебник / В. В. Москаленко. – М. : Инфра-М , 2004. 3 Системы автоматизированного управления электроприводами : учеб. пособие / Под общ. ред. Ю. Н. Петренко. – Минск : ООО «Новое знание», 2004. Лабораторная работа №5 Исследование процесса пуска асинхронного двигателя с короткозамкнутым ротором 1 Цели работы: изучить основные способы пуска асинхронного двигателя (АД) с короткозамкнутым ротором (КР) практически изучить принцип действия схемы пуска АД с КР приобрести навыки в сборке схемы пуска АД с КР изучить безопасные методы работы на лабораторном стенде 2 Оборудование рабочего места: лабораторный стенд методические указания для проведения лабораторных работ 3 Порядок выполнения работы 3.1 Изучите принцип работы схемы пуска АД с КР (рисунок 5.1). 3.2 Соберите схему согласно рисунку 5.1. Подача напряжения питания осуществляется тумблерами S4 и S5, пуск двигателя М2 осуществляется кнопкой S7, а останов – кнопкой S6. 3.3 Зафиксируйте бросок тока в фазе АД в момент пуска по прибору РА2. 3.4 Запишите показания амперметра РА2 и измерителя частоты вращения Рω в установившемся режиме работы. 3.5 Кнопкой S6 осуществите останов АД и с помощью секундомера зафиксируйте время до остановки двигателя. 3.6 Эксперимент повторите 5 раз. Результаты занесите в таблицу 5.1. Таблица 5.1 – Результаты экспериментов
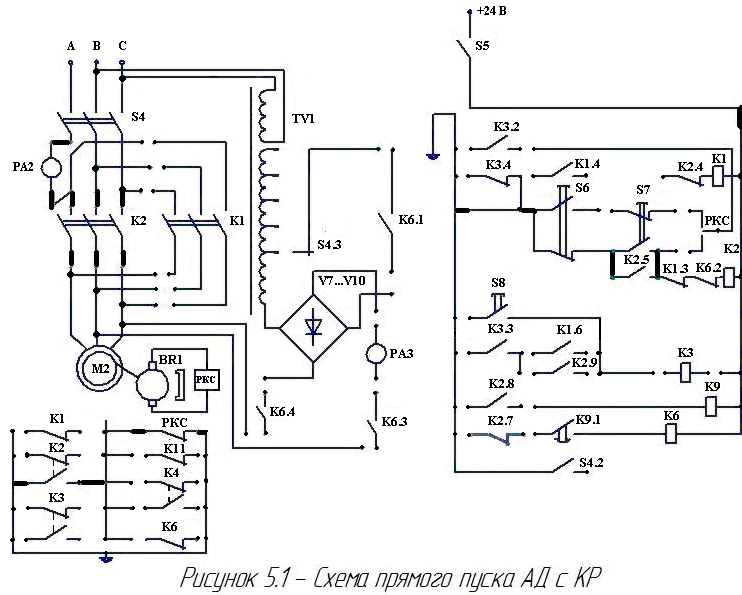 4 Теоретические сведения 4.1 Способы пуска АД с КР П 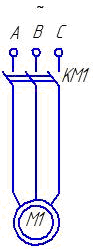 уск АД с КР непосредственным включением в сеть (рисунок 5.2). Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5 – 7 раз превышающий номинальный ток двигателя. Рисунок 5.2 – Схема непосредственного включения в сеть АД с КР При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток также быстро спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать в ней заметное падение напряжения. Однако, этот способ пуска благодаря своей простоте получил наибольшее применение для АД с КР малой и средней мощности (при достаточном сечении жил токоподводящего кабеля). В этих случаях они управляются с помощью магнитных пускателей КМ1, которые одновременно обеспечивают и некоторые виды их защиты. Такой способ пуска АД иногда называют прямым пуском. При необходимости уменьшения пускового тока АД с КР применяют реостатный пуск или какой-либо из способов пуска при пониженном напряжении. П 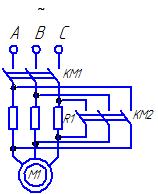 ри реостатном пуске АД с КР в обмотку статора включают пусковые резисторы R1 (рисунок 5.3). В момент разгона двигателя эти резистора ограничивают его пусковой ток. По окончании разгона АД эти резисторы шунтируются замыкающими контактами контактора КМ2. Однако, следует не забывать, что при уменьшении пускового тока одновременно уменьшаются пусковой и критический моменты двигателя. Рисунок 5.3 – Схема включения АД с КР при реостатном пуске Пуск при пониженном напряжении. Пусковой ток двигателя пропорционален подведенному напряжению U1, уменьшение которого вызывает соответствующее уменьшение пускового тока. Существует несколько способов понижения подводимого к двигателю напряжения. Рассмотрим некоторые из них. Для асинхронных двигателей, работающих при соединении обмоток статора треугольником, можно применить пуск переключением обмотки статора со звезды на треугольник (рисунок 5.4). В момент подключения двигателя к сети переключатель SA1 ставят в положение «звезда», при котором обмотка статора оказывается соединенной в звезду. При этом фазное напряжение на статоре понижается в 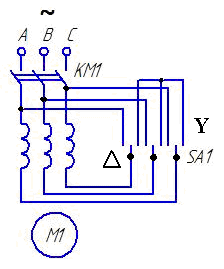 Рисунок 5.4 – Схема включения АД с КР при пуске переключением обмотки статора со звезды на треугольник Кроме того, при соединении обмоток статора звездой линейный ток равен фазному, в то время как при соединении этих же обмоток треугольником линейный ток больше фазного в После того, как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель SA1 переводят в положение «треугольник» и фазные обмотки двигателя оказываются под номинальным напряжением. Возникший при этом бросок тока является незначительным. Рассмотренный способ пуска имеет существенный недостаток – уменьшение фазного напряжения в Более универсальным является способ пуска понижением подводимого к двигателю напряжения посредством реакторов. Порядок включения двигателя в этом случае следующий (рисунок 5.5,а). При разомкнутом рубильнике QS2 включают рубильник QS1. При этом ток из сети поступает в обмотку статора через реакторы LA1, LA2, LA3, на которых происходит падение напряжения. В результате на обмотку статора подается пониженное напряжение U1. После разгона ротора двигателя включают рубильник QS2, и подводимое к обмотке статора напряжение оказывается номинальным U1н. Недостаток этого способа пуска состоит в том, что уменьшение напряжения в U1/U1н раз сопровождается уменьшением пускового момента Мп в (U1/U1н)2 раз. 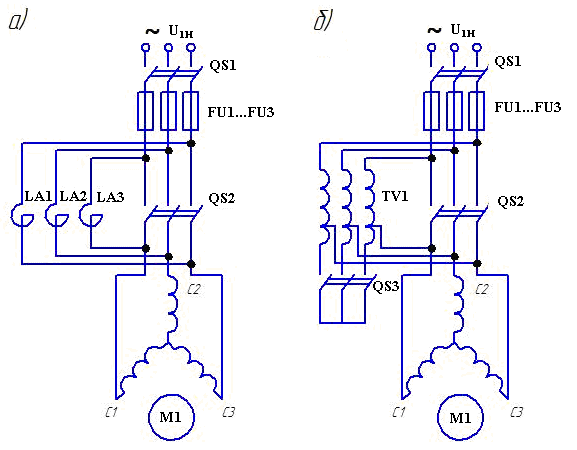 Рисунок 5.5 – Схемы реакторного (а) и автотрансформаторного (б) способа пуска АД с КР При пуске двигателя через понижающий автотрансформатор (рисунок 5.5,б) вначале замыкают рубильник QS3, соединяющий обмотки автотрансформатора звездой, а затем включают рубильник QS1 и двигатель оказывается подключенным на пониженное напряжение Что же касается тока в питающей двигатель сети, т. е. тока на входе автотрансформатора, то он уменьшается в Ка2 раз по сравнению с пусковым током при непосредственном включении двигателя в сеть. Дело в том, что в понижающем автотрансформаторе первичный ток меньше вторичного в Kа раз и поэтому уменьшение пускового тока при автотрансформаторном пуске составляет КаКа = Ка2 раз. Например, если кратность пускового тока асинхронного двигателя при непосредственном его включении в сеть составляет Iп/I1н = 6, а напряжение сети 400 В, то при автотрансформаторном пуске с понижением напряжения до 230 В кратность пускового тока в сети будет равна Iп'/I1н = 6/(400/230)2 = 2. После первоначального разгона ротора двигателя рубильник QS3 размыкают, и автотрансформатор превращается в реактор. При этом напряжение на выводах обмотки статора несколько повышается, но все же остается меньше номинального. Включением рубильника QS2 на двигатель подается полное напряжение сети. Таким образом, автотрансформаторный пуск проходит тремя ступенями: на первой ступени к двигателю подводится напряжение Как и предыдущие способы пуска при пониженном напряжении, автотрансформаторный способ пуска сопровождается уменьшением пускового момента, так как значение последнего прямопропорционально квадрату напряжения. С точки зрения уменьшения пускового тока, автотрансформаторный способ пуска лучше реакторного, так как при реакторном пуске пусковой ток в питающей сети уменьшается в U1/U1н раз, а при автотрансформаторном – в (U1/U1н)2 раз. Но некоторая сложность пусковой операции и повышенная стоимость пусковой аппаратуры (понижающий автотрансформатор и переключающая аппаратура) несколько ограничивают применение этого способа пуска асинхронных двигателей. 4.2 Принцип работы схемы пуска АД с КР Рассмотрим схему прямого пуска АД с КР, показанную на рисунке 5.1. Для подачи напряжения на силовую схему нужно включить тумблер S4, а на схему управления – тумблер S5. Для разгона АД с КР М2 необходимо нажать кнопку S7 «Пуск». Получит питание катушка магнитного пускателя К2, который своим контактом К2.5 шунтирует кнопку S7, а через силовые контакты К2 подает номинальное напряжение сети на обмотку статора АД. Происходит прямой пуск АД с КР. Для останова двигателя необходимо нажать кнопку S6 «Стоп». Торможение двигателя будет осуществляться под действием момента нагрузки на его валу. 5 Содержание отчета 5.1 Название лабораторной работы и ее цели. 5.2 Краткое описание способов пуска АД с КР с помощью соответствующих схем включения двигателя. 5.3 Схема электрическая принципиальная пуска АД с КР. Краткое описание работы данной схемы. 5.4 Таблица 5.1. 5.5 Выводы о проделанной работе. 6 Контрольные вопросы 6.1 Поясните, какой способ пуска АД с КР называется прямым пуском. 6.2 Назовите достоинства и недостатки прямого пуска АД с КР. 6.3 Перечислите способы пуска АД с КР, которые применяются для снижения его пускового тока. 6.4 Поясните, как осуществляется пуск АД с КР с переключением его обмоток статора со звезды на треугольник. 6.5 Объясните различие схем пуска АД с КР с помощью реакторов и автотрансформатора. Литература 1 Гульков, Г. И. Системы автоматического управления электроприводами : учеб. пособие / Г. И. Гульков, Ю. Н. Петренко, Т. В. Бачило; под общ. ред. Ю. Н. Петренко. – Минск : ИВЦ Минфина, 2014. 2 Москаленко, В. В. Системы автоматизированного управления электропривода : учебник / В. В. Москаленко. – М. : Инфра-М , 2004. 3 Системы автоматизированного управления электроприводами : учеб. пособие / Под общ. ред. Ю. Н. Петренко. – Минск : ООО «Новое знание», 2004. Лабораторная работа №6 Исследование процессов торможения противовключением и реверса асинхронного двигателя с короткозамкнутым ротором 1 Цели работы: научиться рассчитывать время торможения АД с КР противовключением практически изучить схему торможения АД с КР противовключением практически изучить схему реверса АД с КР изучить безопасные методы работы на лабораторном стенде |