Лабораторные. ЛР_САУЭП_ГЭТ_2020. Методические указания для проведения лабораторных работ по учебной дисциплине системы автоматического управления электроприводами
 Скачать 3.51 Mb. Скачать 3.51 Mb.
|

2 Оборудование рабочего месталабораторный стенд методические указания для проведения лабораторных работ 3 Порядок выполнения работы 3.1 Изучите принцип работы схемы торможения АД с КР противовключением (рисунок 6.1). 3.2 Соберите схему согласно рисунку 6.1. После включения тумблеров S4 и S5 возможен пуск АД с КР М2 кнопкой S7 «Вперед» или кнопкой S6 «Назад». Для торможения АД противовключением следует нажать кнопку S8. 3.3 По паспортным данным двигателя (приложение Б) и приняв Мс= 0,5·Мн рассчитайте время торможения АД противовключением. Значение статической частоты вращения nс определите по прибору Рω. 3.4 Кнопкой S7 запустите АД c КР, кнопкой S8 осуществите режим торможения противовключением. Зафиксируйте бросок тока в фазе статора АД по прибору РА2 и время торможения с помощью секундомера. Сравните это время с временем свободного выбега в л.р.5 и с расчётным. Эксперимент повторите 5 раз. Результаты занесите в таблицу 6.1. Таблица 6.1 – Результаты экспериментов
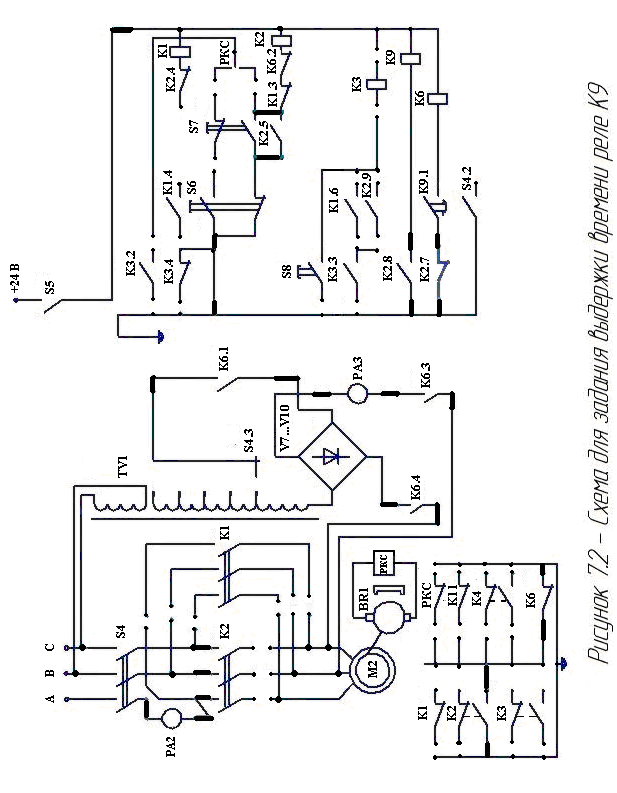
3.5 Изучите принцип работы схемы реверса АД с КР (рисунок 6.1). 3.6 Соберите схему согласно рисунку 6.1 без схемы управления секундомером. 3.7 Запустите двигатель, путем нажатия на кнопку S6. 3.8 Осуществите реверс АД, путем нажатия кнопки S7. 3.9 Зафиксируйте предельное значение тока статора и установившиеся частоты вращения до реверса и после. 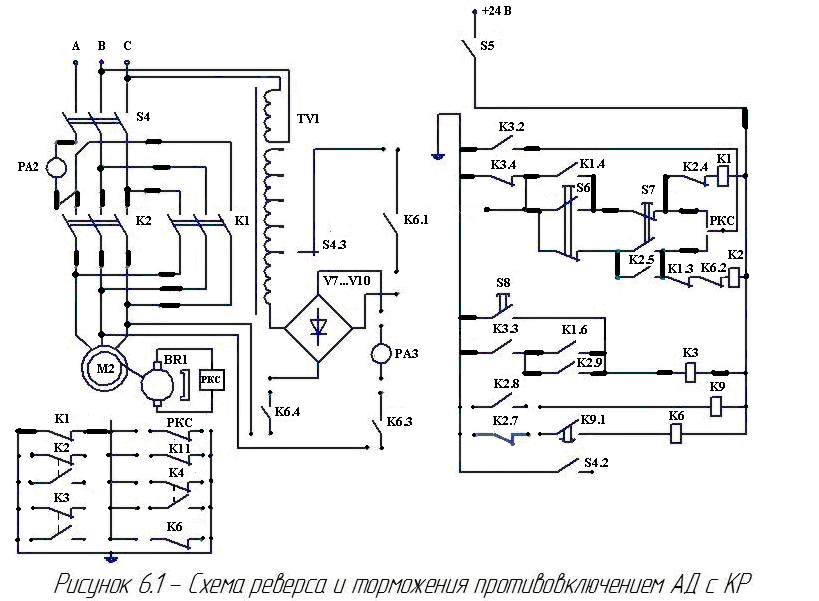 4 Теоретические сведения 4.1 Торможение противовключением АД с КР В настоящее время для торможения рабочего механизма на валу АД используются тормозные свойства самого двигателя, что во многих случаях позволило отказаться от механических тормозов. АД может работать в следующих тормозных режимах: а) генераторном с отдачей энергии в сеть; б) противовключения; в) динамического торможения; г) конденсаторного торможения. Во всех тормозных режимах АД развивает момент, действующий в сторону, противоположную направлению вращения ротора, поэтому он называется тормозным моментом. Под действием этого момента происходит быстрый останов двигателя. В АД с КР торможение противовключением достигается изменением порядка чередования фаз статора. Это приводит к тому, что вращающееся магнитное поле статора изменяет направление вращения на обратное и, на вращающийся по инерции ротор, воздействует тормозной момент (кривая 2 на рисунке 6.2). Ротор останавливается и, если двигатель не отключить, начинается разгон в обратную сторону. Данный вид торможения применяют для быстрого реверсирования. 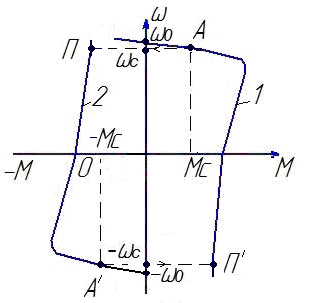 Рисунок 6.2 – Механические характеристики АД с КР Режим торможения противовключением возникает также в том случае, когда под действием внешнего момента, приложенного к валу двигателя, ротор вращается в противоположную сторону относительно вращающегося магнитного поля статора. 4.2 Расчет времени торможения АД с КР противовключением Величину тормозного момента АД, Мт, Н∙м, можно определить по формуле где Мк – критический момент АД, Н·м (приложение Б); Sк – критическое скольжение АД, о.е. (приложение Б). Время торможения АД, tт, с, с учётом величины нагрузки Мс определяется по формуле где ωс – статическая скорость АД, рад/с. Величину статической скорости можно определить по формуле где nс – статическая частота вращения АД, об/мин. За величину nс принять среднее значение частоты вращения из таблицы 6.1. Момент инерции системы электропривода принять J = 0,000871 кг·м2, а момент нагрузки Мс = 0,5·Мн. 4.3 Принцип работы схемы торможения противовключением и реверса АД с КР Рассмотрим электрическую схему, представленную на рисунке 6.1. Чтобы подать напряжение на силовую часть схемы нужно включить тумблер S4, а на схему управления – тумблер S5. Для разгона АД с КР М2 необходимо нажать кнопку S7 «Пуск вперед» или кнопку S6 «Пуск назад». Если мы нажмем кнопку S6, то получит питание катушка магнитного пускателя К1, который своим контактом К1.4 становится на самопитание и через силовые контакты К1 подает напряжение на обмотку статора АД. Контакт реле контроля скорости РКС подготавливает цепь включения магнитного пускателя К2. Для останова двигателя с помощью торможения противовключением необходимо нажать кнопку S8 «Стоп». Это приведет к включению контактора К3, который своим замыкающим контактом К3.3 шунтирует кнопку S8. Размыкающий контакт К3.4 разрывает цепь питания магнитного пускателя К1. Он размыкает свои силовые контакты К1 в цепи питания двигателя М2. В это время через замкнутый контакт К3.2 и контакт РКС получает питание катушка магнитного пускателя К2. Двигатель подключается к сети с другим порядком чередования фаз через силовые контакты К2. С этого момента начинается торможение АД противовключением. При скорости двигателя приблизительно равной нулю, реле контроля скорости разомкнет свой контакт РКС в цепи питания катушки магнитного пускателя К2, что приведет к остановке АД. Для реверсирования двигателя необходимо нажать кнопку S7 (если ранее была нажата кнопка S6). Магнитный пускатель К1 потеряет питание. В тоже время замыкающий контакт кнопки S7 замыкает цепь питания магнитного пускателя К2, контакт К2.5 которого шунтирует кнопку S7, а его силовые контакты подключают двигатель к сети с другим порядком чередования фаз. Происходит торможение АД противовключением. После достижения нулевого значения скорости начинается разгон двигателя в обратном направлении. При равенстве электромагнитного и статического моментов наступает установившийся режим работы АД. 5 Содержание отчета 5.1 Название лабораторной работы и ее цели. 5.2 Схема электрическая принципиальная торможения противовключением и реверса АД с короткозамкнутым ротором. Краткое описание работы данной схемы. Таблица 6.1. Расчет времени торможения АД с короткозамкнутым ротором противовключением. Выводы о проделанной работе. 6 Контрольные вопросы 6.1 Перечислите виды торможения АД. 6.2 Поясните принцип торможения АД противовключением. 6.3 Объясните принцип работы схемы торможения АД с КР противовключением. 6.4 Поясните, для чего применяется в схеме торможения АД противовключением реле контроля скорости (РКС). 6.5 Объясните, как будет изменяться ток двигателя в процессе торможения. 6.6 Объясните, почему одновременное нажатие на кнопки SВ6 и SВ7 не приведет к аварийной ситуации в схеме управления АД. Литература 1 Гульков, Г. И. Системы автоматического управления электроприводами : учеб. пособие / Г. И. Гульков, Ю. Н. Петренко, Т. В. Бачило; под общ. ред. Ю. Н. Петренко. – Минск : ИВЦ Минфина, 2014. 2 Москаленко, В. В. Системы автоматизированного управления электропривода : учебник / В. В. Москаленко. – М. : Инфра-М , 2004. 3 Системы автоматизированного управления электроприводами : учеб. пособие / Под общ. ред. Ю. Н. Петренко. – Минск : ООО «Новое знание», 2004. Лабораторная работа №7 Исследование процесса динамического торможения асинхронного двигателя с короткозамкнутым ротором 1 Цели работы: изучить принцип действия схемы динамического торможения АД научиться рассчитывать время динамического торможения АД с КР приобрести навыки в сборке и настройке схемы изучить безопасные методы работы на лабораторном стенде 2 Оборудование рабочего места:лабораторный стенд методические указания для проведения лабораторных работ 3 Порядок выполнения работы 3.1 Изучите принцип работы схемы динамического торможения АД с КР (рисунок 7.1). 3.2 Используя паспортные данные асинхронного двигателя (приложение Б) и приняв величину постоянного тока Iп = 2·I0, рассчитайте время динамического торможения tдт. 3.3 Соберите схему, изображенную на рисунке 7.2. Установите переключатель S13 в крайнее левое положение. Нажмите кнопку S7, а затем кнопку S6. Потенциометром RР9 подберите время срабатывания реле времени К9 немного больше расчётного tдт. После этого переключателем S13 установите постоянный ток Iп = 2·I0 по амперметру РА3. 3.4 Соберите схему, изображенную на рисунке 7.1. Кнопкой S7 запустите двигатель, кнопкой S6 – остановите. Зафиксируйте время торможения. Сравните результаты с л.р.5 и л.р.6. 3.5 Эксперимент повторите 5 раз, изменяя значение тока Iп. Результаты занесите в таблицу 7.1. Таблица 7.1 – Результаты экспериментов
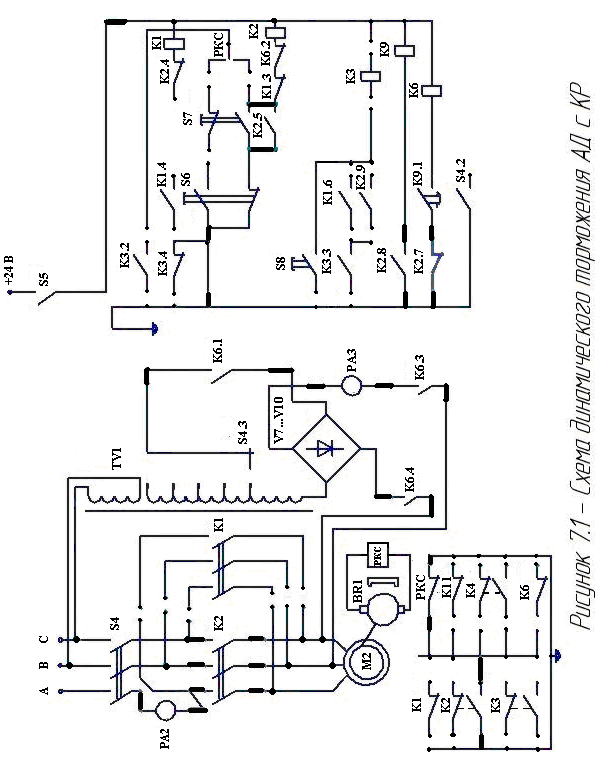  4 Теоретические сведения 4.1 Динамическое торможение АД с КР В режиме динамического торможения обмотку статора асинхронного двигателя отключают контактами КМ1 от сети переменного тока и контактом КМ2 подключают к источнику постоянного тока Uп (рисунок 7.3), в качестве которого может использоваться полупроводниковый выпрямитель. 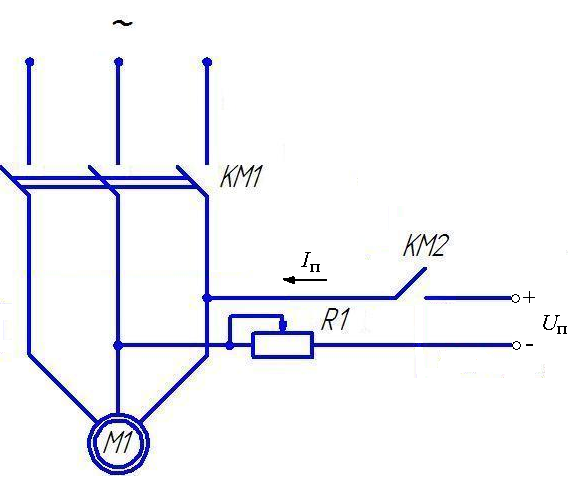 Рисунок 7.3 – Схема включения АД с КР при динамическом торможенииПостоянный ток Iп , протекая по обмоткам статора, создает неподвижное в пространстве магнитное поле, в котором вращается ротор. В фазах ротора наводится ЭДС, создающая переменный ток. Взаимодействие магнитного поля статора с током ротора создает тормозной момент, за счет чего достигается эффект торможения. Интенсивность динамического торможения регулируется резистором R1, с помощью которого устанавливается необходимый постоянный ток Iп в обмотке статора двигателя. Механические характеристики АД в режиме динамического торможения показаны на рисунке 7.4. 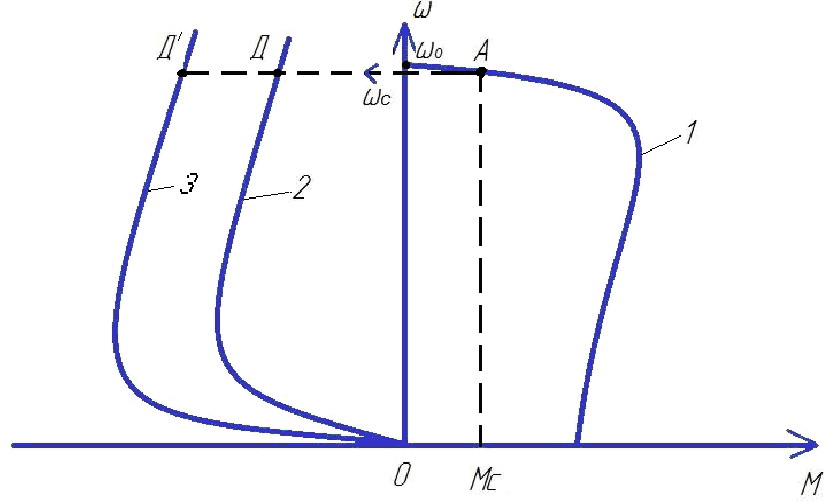 Рисунок 7.4 – Механические характеристики АД при динамическом торможении На характеристике 1 АД работает в двигательном режиме. Кривые 1 и 2 соответствуют режиму динамического торможения АД при различных значениях постоянного тока Iп. Динамическое торможение асинхронных двигателей отличается простотой и надёжностью. Его используют в приводах подъемных механизмов, многих металлорежущих станков. 4.2 Расчет времени динамического торможения АД с КР Время динамического торможения tдт, с, с учётом нагрузки Мс может быть определено из выражения где J – момент инерции системы электропривода, кг·м2; c – статическая скорость АД, рад/с; Мдт – тормозной момент при динамическом торможении АД, Н∙м. Момент инерции системы электропривода принять J=0,000871 кг·м2, а момент нагрузки Мс = 0,5·Мн. Статическую скорость АД c принять равной н. Величину тормозного момента при динамическом торможении АД можно определить по формуле где Мкт, Sкт – критический момент и критическое скольжение АД в режиме динамического торможения, Н·м и о.е. Критический момент двигателя в режиме динамического торможения определяют из следующего выражения  , (7.3) , (7.3)где Iэ – эквивалентный ток АД при динамическом торможении, А; Хμ – индуктивное сопротивление контура намагничивания, Ом. Для данной работы Хμ принимается равным 2189 Ом; ω0 – синхронная скорость АД, рад/с. Принимается равной 314 рад/с; Х/2 – приведенное индуктивное сопротивление фазы обмотки ротора, Ом (приложение Б). Для данной схемы динамического торможения значение эквивалентного тока равно Величина постоянного тока Iп, А, принимается равной где Iо – ток холостого хода АД, А (приложение Б). Критическое скольжение АД в режиме динамического торможения определяется по формуле где R/2 – приведенное активное сопротивление фазы обмотки ротора, Ом, (приложение Б). Принцип работы схемы динамического торможения АД с КР Рассмотрим схему, представленную на рисунке 7.1. Для подачи напряжения на силовую часть схемы нужно включить тумблер S4, а на схему управления – тумблер S5. Для разгона АД с КР М2 необходимо нажать кнопку S7 «Пуск». Получает питание катушка магнитного пускателя К2, который своим контактом К2.5 становится на самопитание и через силовые контакты К2 подает сетевое напряжение на обмотку статора АД. Двигатель начинает вращаться. Замыкание контакта К2.8 приводит к срабатыванию реле времени К9, которое замыкает свой контакт К9.1 в цепи питания контактора торможения К6. Однако, катушка последнего не запитывается, так как контакт К2.7 разомкнут. После разгона наступает установившийся режим работы АД. Для динамического торможения двигателя необходимо нажать кнопку S6 «Стоп». Катушка магнитного пускателя К2 потеряет питание и разомкнет свой контакт К2.8 и силовые контакты К2. Это приведет к отключению реле времени К9 и началу отсчета выдержки времени на размыкание контакта К9.1. В это время через замкнувшийся контакт К2.7 запитывается катушка контактора торможения К6. Через замкнувшиеся замыкающие контакты К6.1, К6.3, К6.4 от неуправляемого выпрямителя V7…V10 подается постоянный ток на две фазы обмотки статора АД. Начинается динамическое торможение двигателя. Через время, равное выдержке времени реле К9, контакт К9.1 разомкнется, катушка контактора К6 потеряет питание, контакты К6.1, К6.3, К6.4 разомкнутся. АД остановится и постоянное напряжение будет снято с обмотки статора. 5 Содержание отчета 5.1 Название лабораторной работы и ее цели. 5.2 Схема электрическая принципиальная динамического торможения АД с КР. Краткое описание работы схемы. 5.3 Расчет времени динамического торможения АД. 5.4 Таблица 7.1. 5.5 Выводы о проделанной работе. 6 Контрольные вопросы 6.1 Поясните особенности динамического торможения АД. 6.2 Объясните, каким образом получают постоянный ток для динамического торможения АД. 6.3 Объясните принцип действия схемы динамического торможения АД. 6.4 Сравните время динамического торможения АД со временем торможения противовключением и свободным выбегом. Литература 1 Гульков, Г. И. Системы автоматического управления электроприводами : учеб. пособие / Г. И. Гульков, Ю. Н. Петренко, Т. В. Бачило; под общ. ред. Ю. Н. Петренко. – Минск : ИВЦ Минфина, 2014. 2 Москаленко, В. В. Системы автоматизированного управления электропривода : учебник / В. В. Москаленко. – М. : Инфра-М , 2004. 3 Системы автоматизированного управления электроприводами : учеб. пособие / Под общ. ред. Ю. Н. Петренко. – Минск : ООО «Новое знание», 2004. Лабораторная работа №8 Исследование работы однофазного тиристорного преобразователя 1 Цели работы: практически изучить принцип действия однофазного тиристорного преобразователя (ТП) исследовать схему управления однофазным тиристорным преобразователем построить регулировочную и выходную характеристики ТП изучить безопасные методы работы на лабораторном стенде 2 Оборудование рабочего места:лабораторный стенд методические указания для проведения лабораторных работ осциллограф тестер 3 Порядок выполнения работы 3.1 Изучите принцип работы схемы однофазного мостового полууправляемого нереверсивного выпрямителя (рисунок 8.1). 3.2 Соберите схему согласно рисунку 8.1. 3.3 Включите сетевой выключатель. Подайте напряжение питания на преобразователь тумблером S3. 3.4 Снимите осциллограммы сигналов на выходе блоков ГОИ, СС, БФИ и на нагрузке в нескольких положениях потенциометра R1, в том числе при минимальном и максимальном напряжении на нагрузке. Напряжение задания Uз на движке потенциометра R1 измеряйте тестером. По осциллограммам определите углы открывания тиристоров. 3.5 Снимите регулировочную характеристику выпрямителя Uнаг = f(Uз). Напряжение Uз измеряйте с помощью тестера. 3.6 Для двух-трёх значений Uз по двум точкам снимите выходные характеристики Uнаг = f(Iнаг). 3.7 Измеренные данные занести в таблицу 8.1. Таблица 8.1 – Результаты экспериментов
3.8 По окончании опыта отключите тумблер S3 и сетевой выключатель. 3.9 Постройте регулировочную характеристику выпрямителя Uнаг=f(Uз) и выходную характеристику Uнаг = f(Iнаг). 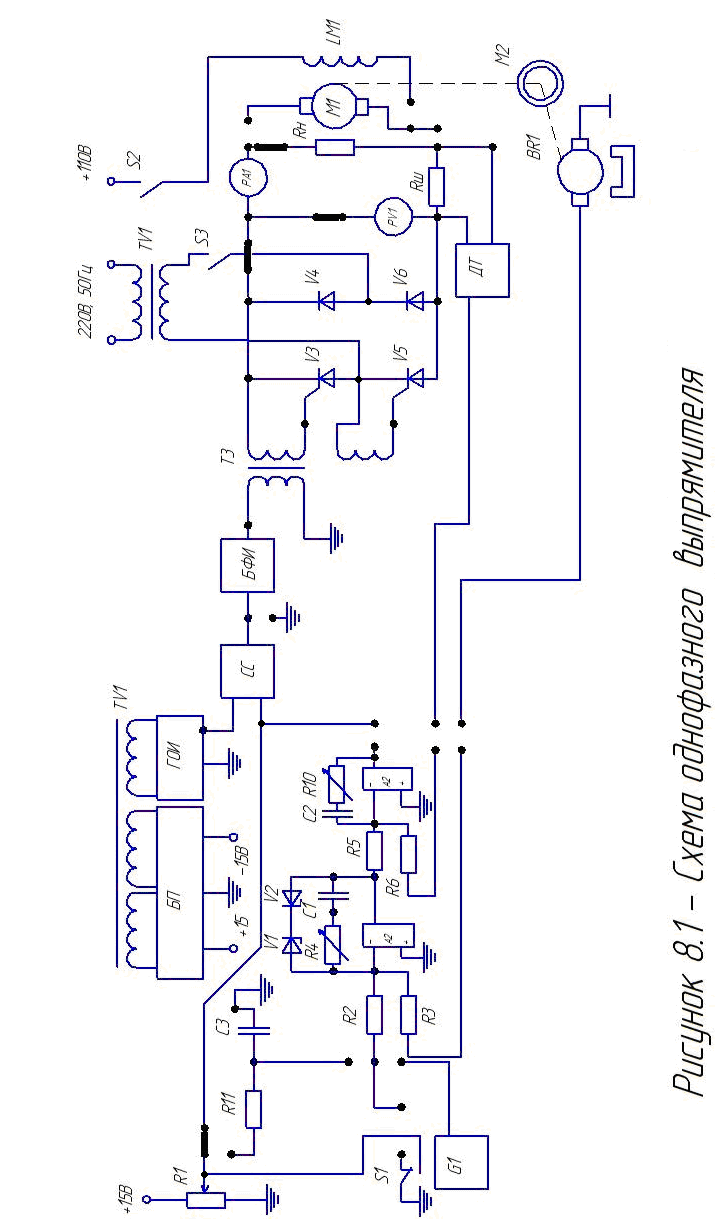 4 Теоретические сведения Схема однофазного мостового полууправляемого нереверсивного выпрямителя показана на рисунке 8.1. Выпрямитель выполнен на полупроводниковых диодах V4, V6 и тиристорах V3, V5. Регулирование величины напряжения на нагрузке осуществляет изменением угла открывания тиристоров. Осциллограмма, снимаемая с нагрузки, имеет вид, показанный на рисунке 8.2. 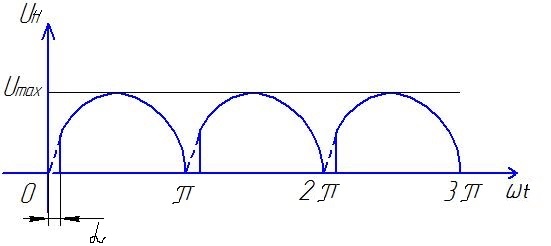 Рисунок 8.2 – Напряжение на нагрузке выпрямителя При α = π тиристоры практически закрыты и на нагрузке нет напряжения, а при α = 0 полностью открыты и напряжение на нагрузке имеет вид полных полуволн и соответствует максимальному значению, получаемому от выпрямителя. Управление углом открывания α тиристоров осуществляет система импульсно-фазового управления (СИФУ). На рисунке 8.3 показаны временные диаграммы работы СИФУ, поясняющие процесс формирования угла α. 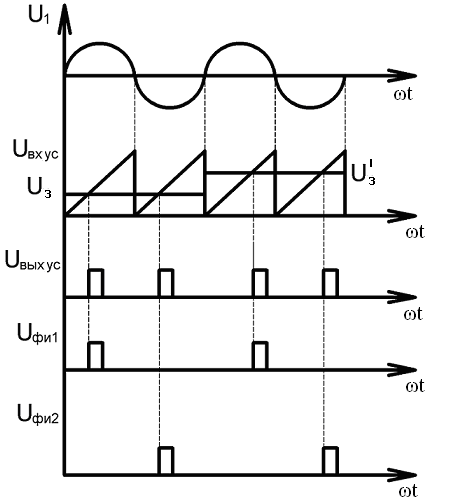 Рисунок 8.3 – Временные диаграммы работы СИФУ СИФУ формирует синхронизированные с сетевым напряжением импульсы управления, передаваемые на управляющие электроды тиристоров через импульсный трансформатор Т3. Этот трансформатор позволяет также осуществить гальваническую развязку силовых цепей выпрямителя с цепями системы управления. Синхронизация импульсов управления с сетевым напряжением достигается путем формирования в генераторе опорных импульсов (ГОИ) из пониженного синусоидального напряжения импульсов пилообразной формы (рисунок 8.3). Напряжение пилообразной формы поступает в систему сравнения (СС), равно как и напряжение задания Uз, снимаемое с потенциометра R1. В результате сравнения этих напряжений СС формирует прямоугольные импульсы в момент их равенства. Фаза импульсов зависит от положения движка потенциометра R1. Полученные импульсы определяют угол открывания α тиристоров, преобразуясь по мощности и длительности в блоке формирования импульсов (БФИ) для передачи через импульсный трансформатор Т3. 5 Содержание отчета 5.1 Название лабораторной работы и ее цели. 5.2 Схема электрическая принципиальная однофазного выпрямителя Краткое описание работы схемы. 5.3 Таблица 8.1. 5.4 Регулировочная характеристика выпрямителя Uнаг = f(Uз) и выходная характеристика Uнаг = f(Iнаг). 5.5 Выводы о проделанной работе. 6 Контрольные вопросы 6.1 Объясните принцип работы схемы однофазного мостового полууправляемого нереверсивного выпрямителя. 6.2 Объясните принцип работы СИФУ однофазным выпрямителем. 6.3 Поясните, с какой целью применяется гальваническая развязка силовых и управляющих цепей. 6.4 Поясните, для чего необходима синхронизация управляющих импульсов с сетевым напряжением. Литература 1 Гульков, Г. И. Системы автоматического управления электроприводами : учеб. пособие / Г. И. Гульков, Ю. Н. Петренко, Т. В. Бачило; под общ. ред. Ю. Н. Петренко. – Минск : ИВЦ Минфина, 2014. 2 Москаленко, В. В. Системы автоматизированного управления электропривода : учебник / В. В. Москаленко. – М. : Инфра-М , 2004. 3 Системы автоматизированного управления электроприводами : учеб. пособие / Под общ. ред. Ю. Н. Петренко. – Минск : ООО «Новое знание», 2004. Лабораторная работа №9 Исследование работы разомкнутой системы управления двигателем постоянного тока 1 Цели работы: исследовать работу разомкнутой системы управления ДПТ при влиянии нагрузки построить механические характеристики ДПТ при работе с разомкнутой системой управления изучить безопасные методы работы на лабораторном стенде 2 Оборудование рабочего места:лабораторный стенд методические указания для проведения лабораторных работ тестер 3 Порядок выполнения работы 3.1 Изучите принцип работы разомкнутой системы управления ДПТ (рисунок 9.1). 3.2 Соберите схему согласно рисунку 9.1. 3.3 Включите сетевой выключатель, убедитесь в присутствии напряжения. Подайте напряжение питания на схему тумблерами S2 и S3. 3.4 Регулируя величину напряжения задания Uз потенциометром R1, установите частоту вращения двигателя, при которой прибор Рω покажет приблизительно половину предела измерения. Тумблером «НАГРУЗКА» при положении переключателя «НАГРУЗКА» в позиции 1 подайте нагрузку на ДПТ. Зафиксируйте провал скорости. Изменяя позицию переключателя «НАГРУЗКА», далее произведите замер величины скорости ДПТ. Данные измерения занесите в таблицу 9.1. Таблица 9.1 – Результаты опыта при напряжении задания Uз1
3.5 Установите переключатель «НАГРУЗКА» в позицию 2, отрегулируйте напряжение (см. п. 3.4) таким образом, чтобы скорость приняла прежнее значение, соответствующее Uд = U1, Мн = Ml. Далее, увеличивая момент нагрузки (переключатель «НАГРУЗКА» в положении 3 и 4) повторите туже операцию. Данные занести в таблицу 9.2. 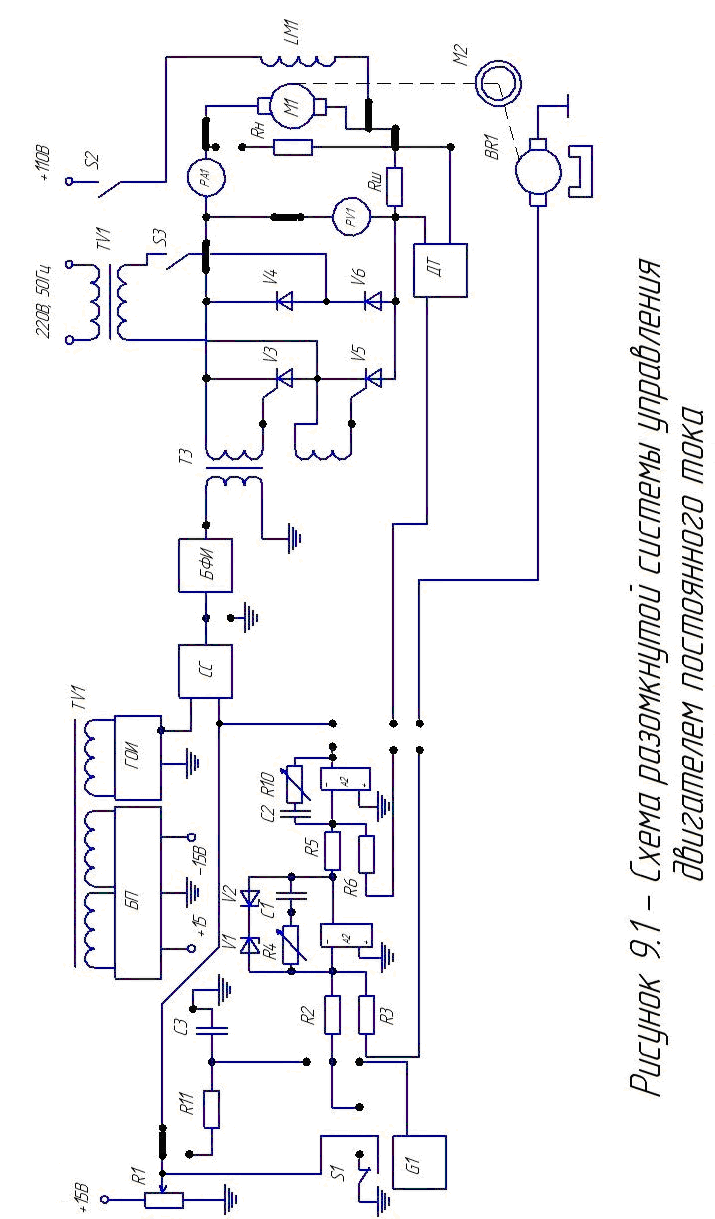 Таблица 9.2 – Результаты опыта при напряжении задания Uз2
3.6 По результатам опытов постройте механические характеристики разомкнутой системы управления ДПТ для напряжений задания Uз1 и Uз2. 4 Теоретические сведения Схема разомкнутой системы управления ДПТ представлена на рисунке 9.1. Управление ДПТ осуществляется с помощью однофазного мостового полууправляемого нереверсивного выпрямителя V3…V6. Регулируя величину напряжения, подводимого к обмотке якоря двигателя, за счет изменения угла открывания тиристоров V3 и V5 выпрямителя с помощью потенциометра R1, можно плавно изменять частоту вращения двигателя, что показывает прибор Рω. В разомкнутой системе управления ДПТ отсутствуют обратные связи между двигателем и самой системой управления. Поэтому при увеличении нагрузки на валу двигателя, частота вращения последнего снижается, что видно из рисунка 9.2. 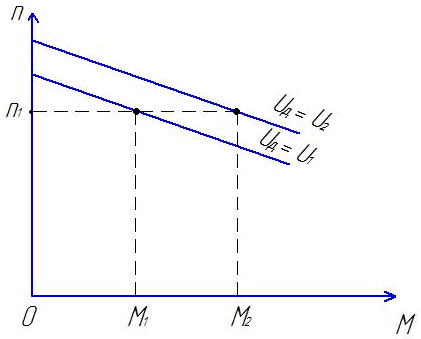 Рисунок 9.2 – Механические характеристики ДПТ при работе с разомкнутой системой управления В связи с этим, если необходимо поддерживать неизменной частоту вращения двигателя, то приходится вручную регулировать напряжение, подаваемое на обмотку якоря двигателя. Если принять рабочую частоту вращения двигателя равной n1 при моменте нагрузке Мнагр = Ml, то напряжение на обмотке якоря двигателя будет равно Uд = U1. Чтобы поддержать частоту вращения n1 на прежнем уровне при увеличении момента нагрузки до значения Мнагр = М2, необходимо увеличить напряжение на обмотке якоря двигателя Uд до значения U2 (рисунок 9.2). При этом возрастает и ток якоря двигателя пропорционально увеличению нагрузки. 5 Содержание отчета 5.1 Название лабораторной работы и ее цели. 5.2 Схема электрическая функциональная разомкнутой системы управления ДПТ. Краткое описание работы схемы. 5.3 Таблицы 9.1 и 9.2. 5.4 Механические характеристики ДПТ при работе с разомкнутой системой управления для напряжений задания Uз1 и Uз2 (в одной координатной плоскости). 5.5 Выводы о проделанной работе. 6 Контрольные вопросы 6.1 Дайте понятие разомкнутой системы управления. 6.2 Объясните принцип работы схемы разомкнутой системы управления двигателем постоянного тока. 6.3 Перечислите и поясните достоинства и недостатки разомкнутой системы управления. Литература 1 Гульков, Г. И. Системы автоматического управления электроприводами : учеб. пособие / Г. И. Гульков, Ю. Н. Петренко, Т. В. Бачило; под общ. ред. Ю. Н. Петренко. – Минск : ИВЦ Минфина, 2014. 2 Москаленко, В. В. Системы автоматизированного управления электропривода : учебник / В. В. Москаленко. – М. : Инфра-М , 2004. 3 Системы автоматизированного управления электроприводами : учеб. пособие / Под общ. ред. Ю. Н. Петренко. – Минск : ООО «Новое знание», 2004. Лабораторная работа №10 Исследование работы замкнутой системы управления двигателем постоянного тока 1 Цели работы: исследовать работу замкнутой системы управления ДПТ при влиянии нагрузки построить механические характеристики ДПТ при работе с замкнутой системой управления изучить безопасные методы работы на лабораторном стенде 2 Оборудование рабочего места:лабораторный стенд методические указания для проведения лабораторных работ 3 Порядок выполнения работы 3.1 Изучите принцип работы замкнутой системы управления ДПТ (рисунок 10.1). 3.2 Соберите схему согласно рисунку 10.1. 3.3 Включить сетевой выключатель и тумблер S1 задания скорости. Подайте питающее напряжение на схему тумблерами S2 и S3. 3.4 Отрегулируйте частоту вращения ДПТ таким образом, чтобы измеритель частоты вращения Рω показывал около 1/3 предела измерения. Зафиксируйте показания приборов РА1, РV1 и Рω. 3.5 При положении переключателя «НАГРУЗКА» в позиции 1 включите тумблер «НАГРУЗКА». Отметьте кратковременный провал частоты вращения и восстановите её до заданного значения через некоторый промежуток времени. Зафиксируйте показания приборов РА1, РV1 и Рω. Отключите нагрузку тумблером «НАГРУЗКА». Затем повторить опыты при различных положениях переключателя «НАГРУЗКА». Данные занести в таблицу 10.1. 3.6 Повторите опыты по п.3.4 и 3.5 для системы с ПИ-регулятором скорости. 3.7 После окончания опыта верните все органы управления и сетевой выключатель в исходное положение. Таблица 10.1 - Результаты опыта
3.8 Постройте механические характеристики замкнутой системы управления ДПТ с П-регулятором и ПИ-регулятором скорости. 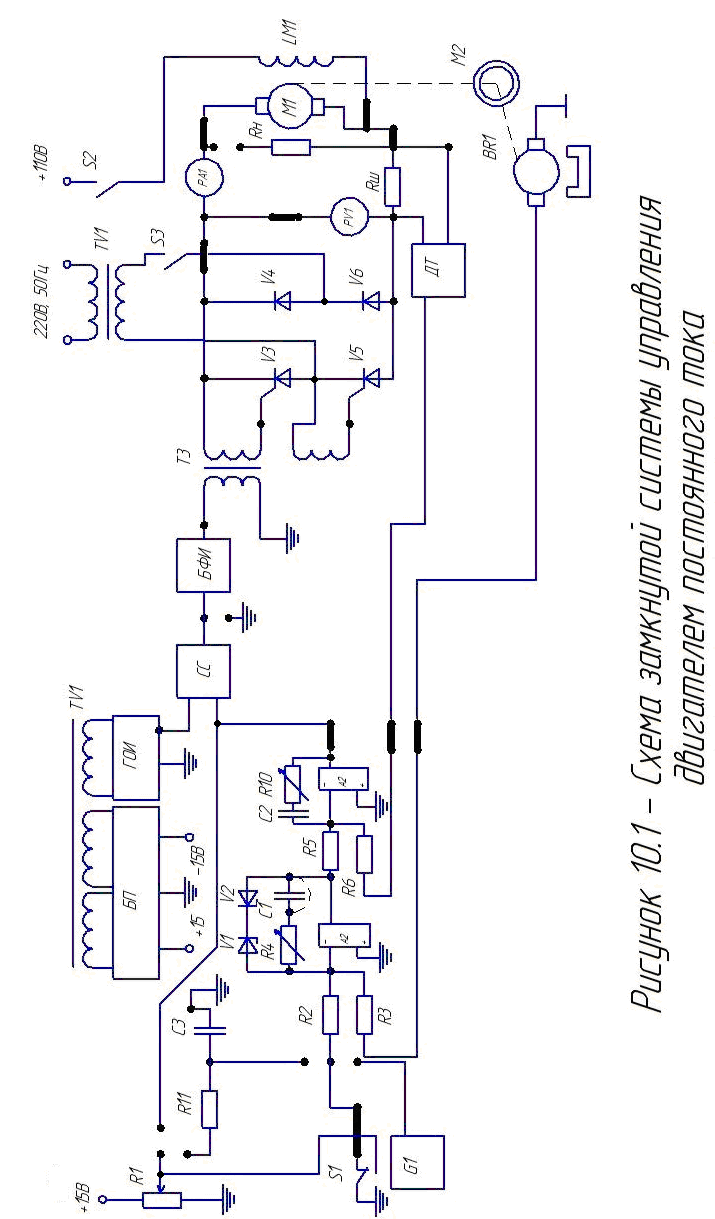 4 Теоретические сведения Замкнутые системы управления ДПТ используются для расширения диапазона регулирования и повышения точности поддержания скорости. В замкнутых системах управление сводится к тому, что в ней автоматически компенсируется воздействие возмущающих факторов (например, момента нагрузки) и угловая скорость или ток двигателя с большей точностью поддерживаются на требуемом уровне. Для этого в систему управления вводится одна или более обратных связей. В зависимости от числа обратных связей различают одноконтурные и многоконтурные замкнутые системы. Для поддержания угловой скорости ДПТ на заданном уровне необходима обратная связь по скорости или от другого параметра, связанного с угловой скоростью (ЭДС двигателя). Схема замкнутой системы управления ДПТ представлена на рисунке 10.1. Сигнал обратной связи по скорости, снимаемый с тахогенератора BR1, поступает на регулятор скорости А1. На его входе происходит алгебраическое суммирование положительного значения напряжения задания, подаваемого с потенциометра R1, и отрицательной величины напряжения обратной связи по скорости. Выходной сигнал с регулятора А1 поступает на регулятор тока А2, позволяющий ввести еще и обратную связь по току, получаемую с датчика тока, в качестве которого используется шунт Rш . В результате, полученный на выходе регулятора А2 суммарный сигнал управления поступает на СИФУ однофазным мостовым полууправляемым нереверсивным выпрямителем V3…V6. Регуляторы А1 и А2 отлажены таким образом, что при отклонении скорости от заданной, этот сигнал изменится ровно на столько, на сколько необходимо изменить напряжение на выходе выпрямителя для восстановления заданного значения скорости ωз. Блок ДТ включает в себя устройство гальванической развязки и усилитель, необходимый для усиления сигнала с шунта Rш. В данной схеме применяются жесткие обратные связи, действующие как в переходном, так и в установившемся режиме. Приведенная схема позволяет исследовать работу замкнутой системы как с П- так и с ПИ-регулятором скорости, что достигается закорачиванием или разблокированием конденсатора С1. 5 Содержание отчета 5.1 Название лабораторной работы и ее цели. 5.2 Схема электрическая функциональная замкнутой системы управления двигателем постоянного тока. Краткое описание работы схемы. 5.3 Таблица 10.1 для замкнутой системы управления ДПТ с П- и ПИ- регулятором скорости. 5.4 Механические характеристики замкнутой системы управления ДПТ с П- и ПИ-регулятором скорости (в одной координатной плоскости). 5.5 Выводы о проделанной работе. 6 Контрольные вопросы 6.1 Объясните принципы построения замкнутых систем автоматического управления ДПТ. 6.2 Поясните назначение обратных связей в замкнутых системах автоматического управления. 6.3 Дайте понятие регулятора. Назовите основные типы регуляторов. 6.4 Дайте понятие датчика. Назовите основные типы датчиков. 6.5 Объясните принцип действия замкнутой системы управления ДПТ. Литература 1 Гульков, Г. И. Системы автоматического управления электроприводами : учеб. пособие / Г. И. Гульков, Ю. Н. Петренко, Т. В. Бачило; под общ. ред. Ю. Н. Петренко. – Минск : ИВЦ Минфина, 2014. 2 Москаленко, В. В. Системы автоматизированного управления электропривода : учебник / В. В. Москаленко. – М. : Инфра-М , 2004. 3 Системы автоматизированного управления электроприводами : учеб. пособие / Под общ. ред. Ю. Н. Петренко. – Минск : ООО «Новое знание», 2004. Приложение А Технические данные двигателя постоянного тока типа СЛ-221
Приложение Б Технические данные асинхронного двигателя с короткозамкнутым ротором типа УАД-052
Разработчик Т.В. БачилоРецензент П.В. ШороховаРассмотрено и рекомендовано к утверждению на: - заседании цикловой комиссии Протокол №от «» 2020 г. Председатель цикловой комиссии спецдисциплин специальностей 2-37 01 05, 2-53 01 05 _______________А.Л. Седюкова - заседании экспертного методического совета Протокол №от «»2020 г. Председатель экспертного методического совета _______________ В.Г. Ульянова Методические указания для проведения лабораторных работ по учебной дисциплине «Системы автоматического управления электроприводами» разработаны на основании учебной программы, утвержденной директором филиала БНТУ «МГПК» в 2020 г.   |