аа. М.У. по пр_ч1. Методические указания к лабораторным работам по дисциплине Электромеханика и электротехническое оборудование
 Скачать 0.52 Mb. Скачать 0.52 Mb.
|

U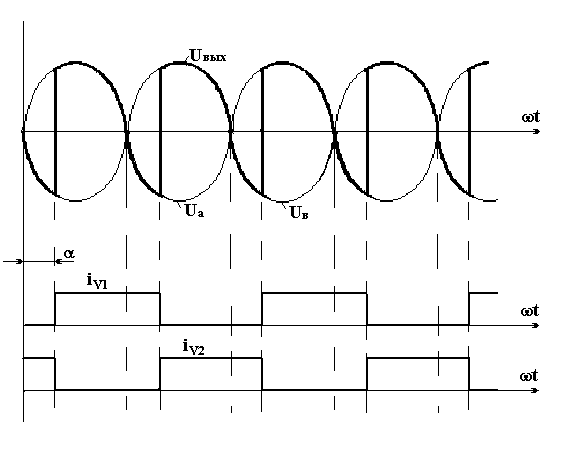 Рисунок 3.3- Графики напряжения и тока для случая активно-индуктивной нагрузки Несмотря на то, что управляющие импульсы поступают на вентили с задержкой на угол относительно моментов их естественного включения, длительность протекания тока через каждый вентиль остаётся равной половине периода напряжения питающей сети. При достаточно большой индуктивности, ток в нагрузке идеально сглажен, а токи вентилей имеют прямоугольную форму, но в отличие от схемы работающей с углом = 0, прямоугольники токов будут сдвинуты относительно выпрямленного напряжения на угол . Сдвиг тока относительно напряжения на угол приводит к появлению в выпрямленном напряжении отрицательных участков, что вызывает снижение его среднего значения. При = /2 среднее значение выпрямленного напряжения становится равным нулю. Если величина индуктивности нагрузки невелика и энергии записанной в ней не хватает для обеспечения непрерывного протекания тока в нагрузке, то первый вентиль выключится раньше, чем включится второй вентиль. Такой режим работы при активно-индуктивной нагрузке называется режимом с прерывистым выпрямленным током. При анализе работы данной схемы процесс перехода тока с одного вентиля на другой рассматривался как мгновенный. В реальных схемах из-за наличия индуктивностей обмоток трансформатора (обусловленных в основном потоками рассеяния обмоток) процесс перехода тока с одного вентиля на другой (процесс коммутации) происходит в течение определительного времени (ток в индуктивности скачком измениться не может). На рисунке 3.4 представлены графики напряжений и токов в схеме поясняющие процесс коммутации токов.   t1 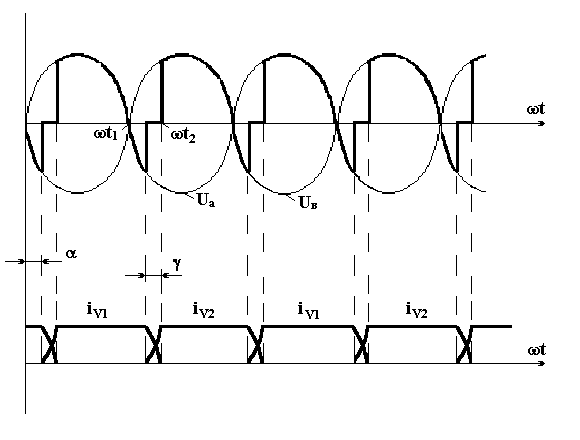 Рисунок 3.4 Предположим, в проводящем состоянии находится первый вентиль. В момент t1 поступает отпирающий импульс на второй вентиль. Поскольку потенциал анода вентиля в этот момент положителен, то второй вентиль включается. Начиная с момента t1 оба вентиля будут включены и вторичные обмотки трансформатора оказываются замкнуты через них накоротко . Под воздействием ЭДС вторичных полуобмоток в короткозамкнутой цепи возникает ток короткого замыкания , который является коммутирующим током . Этот ток направлен от полуобмотки с большим потенциалом (в) к полуобмотке с меньшим потенциалом (а) . Учитывая , что выпрямленный ток (ток нагрузки ) в период коммутации остаётся неизменным получим , что он будет в это время равен сумме токов обоих вентилей. В интервале времени от t1 до t2 ток первого вентиля плавно уменьшается, а ток второго вентиля плавно нарастает, причём на всём интервале сохраняется равенство. Сумма этих токов равна току нагрузки. Когда ток второго вентиля станет равен току нагрузки, ток первого вентиля снизится до нуля и первый вентиль закроется, это произойдёт в момент t2 . Угол называют углом коммутации. Следует отметить, что с увеличением угол уменьшается. Это объясняется тем, что с увеличением растёт напряжение под действием, которого развивается ток второго вентиля, и он нарастает быстрее до значения тока нагрузки. Выпрямленное напряжение и ток содержат как постоянные составляющие Ud , Id , так и переменные составляющие. Наличие переменной составляющей (пульсаций) ухудшает условия коммутации двигателей постоянного тока, увеличивает потери в них, поэтому на выходе выпрямителя обычно устанавливают индуктивный фильтр, который представляет собой реактор (катушку индуктивности) с большим индуктивным сопротивлением, что уменьшает (сглаживает) переменную составляющую. Другим средством уменьшения пульсации выпрямленного напряжения является использование многофазных схем выпрямления. Трёхфазный однополупериодный управляемый выпрямитель Схема такого выпрямителя представлена ниже на рисунке 3.5.  c 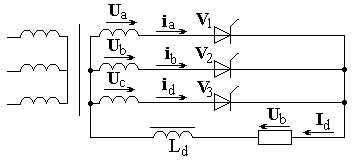 Рисунок 3.5- Трёхфазный однополупериодный управляемый выпрямитель Особенностями процесса коммутации вентилей в трёхфазных схемах при активно-индуктивной нагрузке является то, что мгновенное значение входного напряжения в период коммутации не падает до нуля, а становится равным среднеарифметическому напряжению фаз, которые коммутируются (переключаются). Это объясняется тем, что в период коммутации возникают частичные контуры короткого замыкания между фазами, которые коммутируются. На рисунке 3.6 представлены графики изменения напряжения и тока на элементах трёхфазного однополупериодного управляемого выпрямителя с учётом индуктивностей трансформатор, а также индуктивности сглаживающего дросселя Ld такой величины, при которой ток в нагрузке можно считать идеально сглаженным.  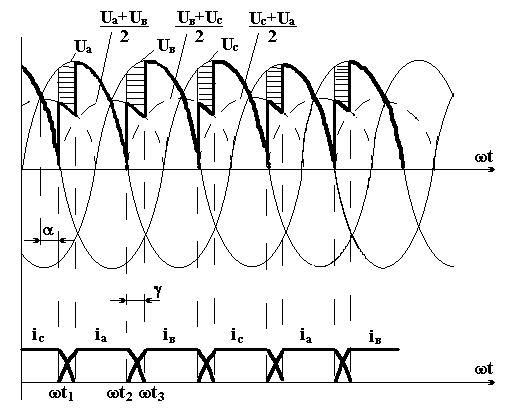 Рисунок 3.6 Из-за наличия индуктивностей в цепи переход тока от одного тиристора к другому происходит не мгновенно , а в течении времени которое соответствует так называемому углу коммутации . В интервале t1- t2 работает (открыт) тиристор V1 , в момент t2 начинается процесс коммутации тока с тиристора V1 наV2 .В интервале t2- t3 открыты оба тиристора V1 ,V2 . За счёт ЭДС самоиндукции наводимой в фазе (а) ток в ней спадает не сразу, из напряжения Ub вычитается часть напряжения, которое соответствует ЭДС самоиндукции. Эта ЭДС самоиндукции препятствует росту тока ib , так что сумма токов iа и ib на интервале t2- t3 остаётся постоянной, равная выпрямленному току id. К концу коммутации в момент t3 ток iа в тиристоре V1 становится равным нулю, а ток ib в тиристоре V2 возрастает до значения id. В период коммутации выпрямленное напряжение становится меньшим и равно: Ud = (Ua + Ub) / 2 Оно изменяется, так как показано на графике напряжения, представленном на рисунке приведённом выше. К концу коммутации напряжение скачком возрастает до фазного напряжения Ub . Следовательно, выпрямленное напряжение снижается из-за индуктивного падения напряжения, которое на рисунке показано заштрихованными площадками. Описание лабораторного стенда Лабораторный стенд содержит комплектный однофазный тиристорный электропривод типа ЭПУ-1Е, применяемый в машиностроительной промышленности для привода станков. Принципиальная схема стенда представлена на рисунке 3.7. Схема питается от однофазной сети переменного тока напряжением 380В через автоматический выключатель. Силовая часть электропривода содержит электродвигатель М постоянного тока независимого возбуждения типа ГПМ-112. В качестве нагрузки на электродвигатель используется генератор Г постоянного тока независимого возбуждения, вал которого жестко соединен с валом электродвигателя М (на схеме вал показан пунктиром). Для измерения частоты вращения вала электродвигателя на нем установлен фотоэлектрический датчик скорости Bw. Якорь электродвигателя М через дроссель L2 и амперметр a1 подключен к выходу однофазного выпрямителя, собранного по мостовой схеме на диодах V1, V2, V3, V4. Переменное напряжение, подаваемое на вход выпрямителя, регулируется по значению посредством семистора Vб, цепь управления которого подключена к вторичной обмотке импульсного трансформатора ТРИ. Первичная обмотка трансформатора ТРИ подключена к системе управления СУ, которая показана на принципиальной схеме в виде прямоугольника. Питание СУ осуществляется от сети переменного тока через трансформатор ТР1. Система управления СУ управляет работой семистора У6, а режим работы СУ задается резистором R3C. Резистором R3C, можно регулировать значение напряжения, прикладываемое к якорю электродвигателя М, и тем самым изменять его угловую скорость. Следовательно, в данном комплектном тиристорном электроприводе типа ЭПУ-1Е скорость вращения электродвигателя регулируется посредством изменения напряжения, подводимого к якорю.  Рисунок 3.7 – Принципиальная схема стенда Дроссель L2 служит для сглаживания пульсаций тока на выходе выпрямителя. Для контроля значений тока якоря электродвигателя М дроссель L2 снабжен вторичной обмоткой, сигнал с которой поступает в систему управления СУ (клеммы 2 и 3 дросселя L2). Кроме того, в СУ поступает информация о значении напряжения на якоре электродвигателя М (клеммы 5 и 1 СУ). Обмотка возбуждения ОВ электродвигателя М подключена к сети переменного тока через отдельный выпрямитель V5. Обмотка якоря генератора Г подключена к нагрузочному резистору R4 через амперметр а3. Обмотка возбуждения генератора Г питается от специального блока управления обмоткой возбуждения генератора БУОВГ, выходное напряжение которого можно регулировать посредством резистора. Изменяя напряжение на обмотке возбуждения генератора Г, можно регулировать отдаваемую мощность генератора и, следовательно, тормозной момент, создаваемый генератором на валу электродвигателя М Внимание. Для контроля работы схемы на стенде предусмотрены гнезда для подключения осциллографа. Все гнезда находятся под потенциалом 380В относительно корпуса стенда, поэтому корпус осциллографа должен быть изолирован от корпуса стенда. Подключение осциллографа и других измерительных приборов к гнездам должно производиться при выключенной схеме. Порядок выполнения работы 1. Изучить принципиальную схему стенда и ответить на контрольные вопросы, приведенные в конце настоящего методического указания. 2. Произвести измерения, необходимые для построения трех электромеханических характеристик электропривода, соответствующих трем следующим частотам вращения электродвигателя при холостом ходе: n = nmax, n = 0,75 nmax, n = 0,5 nmax. При снятии характеристик вначале (вращая резистор R3C) установить одно из заданных значений частоты вращения n при отсутствии нагрузки на вал электродвигателя М (ток якоря генератора Г должен быть равен нулю). После чего, изменяя ток возбуждения генератора Г (тем самым меняя нагрузку на вал электродвигателя М), произвести измерения частоты вращения и тока якоря электродвигателя М (измерения производить примерно с шагом 60 оборотов в минуту). Результаты измерения оформить в виде таблицы 3.1. Примерный вид такой таблицы представлен ниже. Таблица 3.1 Электромеханическая и механическая характеристики при n = nmax
При определении значений момента воспользоваться техническими данными электродвигателя М, приведенными ниже. Используя полученные результаты, построить три механические характеристики в общих координатах. Определить их жесткость. 3. При трех различных напряжениях на якоре, соответствующих тем же значениям частот вращения якоря электродвигателя при холостом ходе, которые приняты в п.2, рассчитать и построить три механические характеристики для двигателя постоянного тока независимого возбуждения типа ГПН-112, установленного на стенде и имеющего следующие технические данные: Рн = 2,2 кВт Фн = 0,0086 Вб n =1500 об/мин Кя = 0,968 Ом Iн=10А J= 0,018 кг*м2 капаH = 0,75 к = 154н*'м/Вб* А Определить жесткость расчетных механических характеристик. Содержание отчета о проделанной работе Содержание отчета должно включать в себя следующее: 1. Цель работы. 2. Порядок выполнения работы. 3. Принципиальную схему стенда. 4. Результаты проведенной работы в виде таблиц, механических характеристик, построенных по экспериментальным данным и данным, полученным в результате расчета. 5. Выводы, полученные из сравнительного анализа полученных результатов. Изложение отчета должно быть последовательным, разделы отчета должны иметь между собой логическую связь. Все таблицы и рисунки (схемы, механические характеристики) должны быть пронумерованы и на них обязательно должны быть ссылки в тексте. Отчет должен быть аккуратно оформлен, текст написан разборчивым почерком, схемы и рисунки выполнены с применением инструментов (линейки, циркуля, лекала и т.п.) и отвечать требованиям соответствующих ГОСТов. Контрольные вопросы 1. Пояснить работу полупроводниковых диода, тиристора, семистора. 2. Объяснить работу схем однофазных однополупериодного и двухполупериодного неуправляемых и управляемых выпрямителей. Для каждого из выпрямителей изобразить графики входного и выходного напряжений. 3. Объяснить работу схем трехфазных однополупериодного и двухполупериодного неуправляемых и управляемых выпрямителей. Для каждого из выпрямителей изобразить графики входных и выходных напряжений. Рекомендуемая литература 1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981.-576 с. 2. Брускин Д.Э., Зорохович А.Е., Хвостов B.C. Электрические машины. В 2-х частях.-М.: Высшая школа, 1979. 3. Каракулин, М. Л. Электромеханика и электротехническое оборудование учебное пособие / М. Л. Каракулин, Л. М. Лапина ; М-во образования и науки РК, Карагандинский государственный технический университет,. - Караганда: КарГТУ, 2008. – 130с. 4. Копылов В.В Электрические машины М.: Высшая школа, Логос, 2000. 5. Москаленко В.В. Автоматизированный электропривод м.: Энергоатомиздат,1985. ЛАБОРАТОРНАЯ РАБОТА № 4 Изучение статических характеристик электропривода по системе «Асинхронный электродвигатель с короткозамкнутым ротором» План проведения работы: 1. Исследование статических характеристик электропривода с асинхронным электродвигателем с короткозамкнутым ротором. 2. Изучение принципиальной схемы стенда. 3. Произвести измерения, необходимые для построения рабочего участка электромеханической и механической характеристик асинхронного электродвигателя с короткозамкнутым ротором. Краткие теоретические сведения Механическая характеристика асинхронного двигателя Зависимость М=f(S) показана на рисунке 4.1, где указаны области и точки соответствующие характерным режимам работы асинхронной машины. 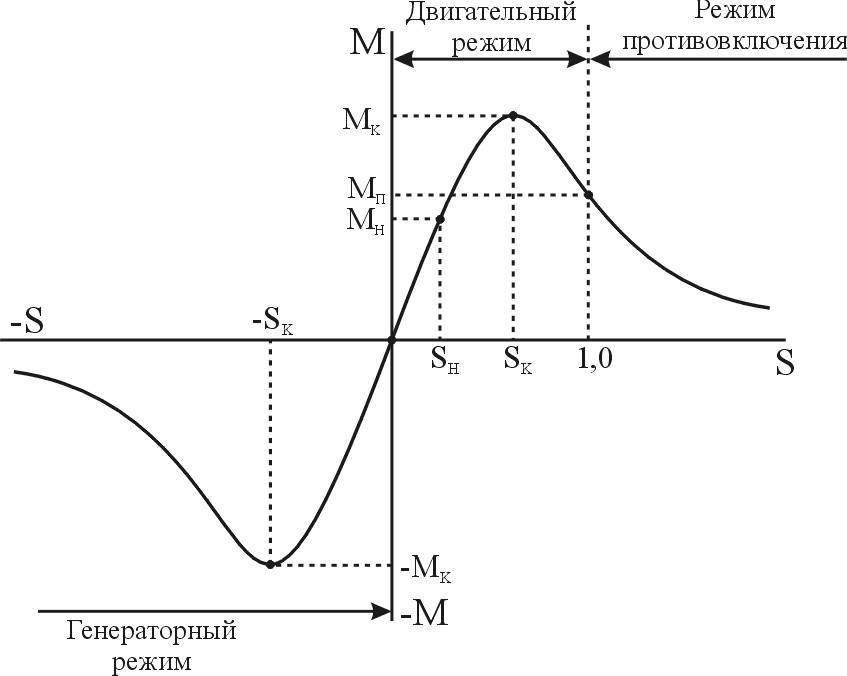 Рисунок 4.1 – Механическая характеристика асинхронного двигателя На механической характеристике можно выделить три участка, каждый из которых соответствует одному из трёх режимов работы асинхронной машины. Двигательный режим работы, ему соответствует изменение скольжения от S=0 до S=1. Режим торможения противовключением, ему соответствует изменение скольжения от S=1 до S . Режим рекуперативного торможения или генераторный режим, ему соответствует отрицательные значения скольжения S<0. Отметим характерные точки механической характеристики, к ним относятся: S=0, M=0, при этом скорость ротора равна синхронной  , так называемый режим идеального холостого хода двигателя; , так называемый режим идеального холостого хода двигателя;S=Sн, М=Мн - номинальный режим двигателя; S=Sк, М=Мк, критический режим, при котором двигатель развивает максимальный момент; S=1.0, М=Мп – момент пуска двигателя, при котором при неподвижном роторе  =0, двигатель развивает пусковой момент Мп; =0, двигатель развивает пусковой момент Мп;S=- Sк, М= - Мк - при котором двигатель развивает максимальный момент в генераторном режиме, когда он работает параллельно с сетью; Асинхронная машина, как и машина постоянного тока, может работать в одном из следующих четырех режимов работы: – двигательный режим 0 – рекуперативное торможение или генераторный режим (при работе параллельно с сетью) 0>S; – торможение противовключением S>1; – динамическое торможение. Для асинхронных двигателей наибольшее распространение получили следующие способы регулирования скорости: 1.Реостатное регулирование путём введения в цепь фазного ротора трёхфазного реостата. 2.Изменение подаваемого к статору напряжения. 3.Переключение числа пар полюсов магнитного поля статора. 4.Изменение частоты напряжения подаваемого на статор. 5.Каскадное включение асинхронного двигателя с другими машинами. | ||||||||||||||||||||||||||||||||||||||||||