аа. М.У. по пр_ч1. Методические указания к лабораторным работам по дисциплине Электромеханика и электротехническое оборудование
 Скачать 0.52 Mb. Скачать 0.52 Mb.
|

|
Карагандинский государственный технический университет им.АБЫЛКАСА САГИНОВА М.Л. Каракулин, Л.М. Лапина МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ЛАБОРАТОРНЫМ РАБОТАМ ПО ДИСЦИПЛИНЕ «Электромеханика и электротехническое оборудование» Караганда 2022 Карагандинский государственный технический университет имени Абылкаса САгинова Кафедра Автоматизации производственных процессов им. проф. В.Ф. Бырьки М.Л Каракулин, Л.М. Лапина МЕТОДИЧЕСКИЕ УКАЗАНИЯ к лабораторным работам по дисциплине «Электромеханика и электротехническое оборудование» для студентов специальностей 5В071800 Форма обучения: очная, очная сокращенная, заочная сокращенная, на базе высшего образования Караганда 2022 УДК 681.51 (07) М.Л. Каракулин, Л.М. Лапина Методические указания к практическим занятиям по дисциплине «Электромеханика и электротехническое оборудование». Караганда: КарГТУ, 2017. 28 с. Методические указания составлены в соответствии с требованиями учебного плана и программой дисциплины «Электромеханика и электротехническое оборудование» и включают все необходимые сведения по выполнению тем лабораторных работ курса. Методические указания предназначены для студентов специальности 5В071800. Рецензент – член Редакционно-издательского совета КарГТУ Брейдо И.В., д.т.н., проф., зав. кафедрой АПП Утверждено Редакционно-издательским советом университета © Карагандинский государственный технический университет, 2017 Содержание
Введение Технический уровень промышленности на современном этапе развития во многом определяется степенью автоматизации. Под автоматизацией процесса подразумевают автоматическое управление производственным процессом без непосредственного участия человека. Автоматизация является одним из главных направлений научно-технического прогресса и важным средством повышения эффективности производства. Дисциплина «Электромеханические системы» ставит целью приобретение студентами знаний по основам и тенденциям развития электромеханики и электротехнического оборудования. Настоящие методические указания составлены в соответствии с рабочими учебными программами курса «Электромеханические системы» для специальности 5В070200 – «Автоматизация и управление». Лабораторная работа № 1 Исследование статических характеристик электропривода с ослаблением магнитного потока План проведения работы: 1. Исследование статических характеристик электропривода постоянного тока с ослаблением магнитного потока. 2. Изучение принципиальной схемы стенда. 3. Произвести измерения, необходимые для построения трех электромеханических характеристик электропривода постоянного тока независимого возбуждения при различных значениях магнитного потока возбуждения Краткие теоретические сведения Из уравнения электромеханической характеристики двигателя постоянного тока ДПТ (рисунок 1.1) = (U – IR) / кФ, следует, что для него возможны три принципиально различные способа регулирования скорости: 1. Изменением тока возбуждения (магнитного потока) двигателя. 2. Изменением сопротивления цепи якоря (сопротивление реостата включенного последовательно с якорем). 3. Изменением подводимого к якорю двигателя напряжения. Регулирование угловой скорости двигателя постоянного тока независимого возбуждения, изменением магнитного потока.  Рисунок 1.1- Схема ДПТ с независимым возбуждением Регулирование угловой скорости изменением тока возбуждения является наиболее простым и экономичным способом. Мощность потребляемая обмоткой возбуждения составляет (2-2,5)% от мощности двигателя. Ток возбуждения регулируется либо с помощью резистора, либо с помощью регулятора напряжения, к которому подключается обмотка возбуждения. Регулирование скорости производится вверх от номинальной, то есть в сторону увеличения, причём допустимый момент изменяется по закону гиперболы, а допустимая мощность остаётся неизменной (рисунок 1.2).  Рисунок 1.2-Зависимость Р,М= f (ω) Ниже представлены электромеханические характеристики для разных значений тока возбуждения (рисунок 1.3):  Рисунок 1.3- Электромеханические характеристики Разным значениям тока возбуждения (магнитного потока) соответствуют разные значения скорости идеального холостого хода. 0 = U / кФ. Все характеристики пересекаются в одной точке при = 0, что следует из уравнения электромеханической характеристики = (U - I R) / кФ = 0, отсюда I = U / R = Iкз. Механические характеристики двигателя при регулировании тока возбуждения представлены ниже (рисунок 1.4).  Рисунок 1.4 - Механические характеристики двигателя при регулировании тока возбуждения Эти характеристики при = 0 не пересекаются в одной точке, поскольку при уменьшении потока уменьшается и значение момента короткого замыкания: Мкз = КIкзФ. Полному использованию двигателя соответствуют точки находящиеся на линии номинального тока, которая соответствует гиперболическому изменению момента. При работе двигателя левее указанной кривой двигатель будет недогружен, а при работе двигателя правее этой кривой двигатель будет перегружен. При постоянном моменте сопротивления и длительной нагрузке двигатель нужно выбирать так, чтобы при наибольшей угловой скорости ток в цепи якоря не превышал номинального. При уменьшении угловых скоростей в этом случае приходится мириться с недогрузкой двигателя. При этом способе диапазон регулирования составляет от 2:1 до 5:1, в отдельных случаях до 10:1. Диапазон регулирования ограничивается рядом факторов, основным из них является ухудшение условий коммутации (усиление искрения) с возрастанием угловой скорости, кроме того при больших скоростях требуется повышать механическую прочность якоря. Нижний предел угловой скорости ограничивается степенью насыщения машины и нагревом обмотки возбуждения, то есть номинальной угловой скоростью. Плавность регулирования в пределах заданного диапазона может быть весьма высокой и зависит от количества ступеней регулировочного реостата или от свойств регулятора напряжения, от которого питается обмотка возбуждения. Необходимо отметить, что в качестве источника регулируемого напряжения может быть использован импульсный регулятор. Описание лабораторного стенда Принципиальная схема стенда представлена на рисунке 1.5. Стенд содержит электродвигатель Д постоянного тока независимого возбуждения. Для создания нагрузки на электродвигатель Д используется генератор Г постоянного тока независимого возбуждения, вал которого жестко соединен с валом электродвигателя Д (на схеме вал показан пунктиром). Для измерения частоты вращения вала электродвигателя на нем установлен датчик скорости ДС, к которому подключен стрелочный индикатор РЭ. Питание стенда осуществляется от однофазной сети переменного тока напряжением 220 В через автоматический выключатель QF. К нему через контакты К11, К12 контактора К1 подключается неуправляемый выпрямитель, собранный на диодах V1, V2, V3, V4. К выпрямителю через делитель напряжения, состоящий из резисторов R3 и R4, подключена обмотка возбуждения ОВД электродвигателя Д. Изменяя сопротивление резистора R3, можно регулировать напряжение на ОВД. Якорь электродвигателя Д подключен к выпрямителю через двухступенчатый пусковой реостат, собранный на резисторах R5 и R6. Пуск электродвигателя Д осуществляется автоматически с управлением в функции скорости [1]. Угловая скорость якоря контролируется косвенно по величине ЭДС якоря. Управление пуском осуществляется контакторами КЗ и К4, а настройка этих контакторов на срабатывание при заданных значениях угловой скорости якоря производится резисторами R7 и R8. В момент пуска включено полное сопротивление реостата, равное сумме сопротивлений резисторов R5,.R6. После достижения якорем первого заданного значения угловой скорости срабатывает контактор КЗ, замыкая свой контакт КЗ, который шунтирует резистор R5. Сопротивление реостата при этом уменьшается и становится равным сопротивлению R6. При дальнейшем возрастании скорости якоря, когда она достигает второго заданного значения, срабатывает контактор К4, замыкая свой контакт К4, который шунтирует резистор R6. Сопротивление реостата при этом становится равным нулю, работа схемы пуска на этом заканчивается. К выпрямителю посредством контактов К21 и К22 контактора К2 через делитель напряжения, состоящий из резисторов R9 и R10 подключена обмотка возбуждения генератора ОВГ. Посредством резистора R9 можно изменять ток возбуждения ОВГ, тем самым регулировать мощность, отдаваемую генератором Г в резистор R11. При этом изменяется тормозной момент, создаваемый генератором Г на валу электродвигателя Д. Порядок выполнения работы: 1. Изучить принципиальную схему стенда (рисунок 1.1) и ответить на контрольные вопросы, приведенные в конце настоящего методического указания. 2. Произвести измерения, необходимые для построения трех электромеханических характеристик электропривода постоянного тока независимого возбуждения при различных значениях магнитного потока возбуждения (соответствующих следующим напряжениям на обмотке возбуждения электродвигателя ОВД: UOB = Umax, UOB = Umin, UOB = Uср. При снятии характеристик вначале, при отсутствии нагрузки на валу электродвигателя Д (ток якоря генератора должен быть равен нулю, контакты К21, К22 разомкнуты), установить одно из заданных значений напряжений на обмотке ОВД, затем, изменяя нагрузку на вал электродвигателя Д (регулируя ток возбуждения генератора Г посредством резистора R9), произвести измерения частоты вращения и тока якоря электродвигателя Д. Результаты измерений оформить в виде таблиц. Примерный вид такой таблицы представлен ниже в таблице 1.1 Таблица 1.1 Электромеханические и механические характеристики, полученные экспериментальным путем
При определении значений момента воспользоваться техническими данными электродвигателя Д, формулами приведенными ниже и зависимостью Ф=f(Iв), приведенной на рисунке 1.6. Используя полученные результаты, построить три электромеханические характеристики n=f(Iя) (в одних координатах) и три механические характеристики n=f(М) (в одних координатах). 3. При трех различных напряжениях магнитного потока возбуждения, соответствующих тем же значениям частот вращения якоря при холостом ходе, которые приняты в п.2, рассчитать и построить естественную механическую характеристику nн=f(Мн) (при Uн) и три механические характеристики n=f(М) (при Фmin Фmax Фср) для электродвигателя постоянного тока независимого возбуждения типа 2ПМ-112, установленного на стенде и имеющего следующие технические данные: Рн = 2,2 кВт Фн = 0,0086 Вб nн =1500 об/мин Rя = 0,968 Ом Uян = 220В Rob = 214 Ом Iн=10А J= 0,018 кг*м2 η = 0,75 К= 154 н*м/Вб*А Результаты измерений оформить в виде таблиц. Примерный вид такой таблицы представлен ниже в таблице 2.1 Таблица 2.1 Механические характеристики, полученные расчетным путем
 , , , ,  , А , А  , А , А     В качестве нагрузочного генератора Г на стенде установлена машина постоянного тока с независимого возбуждения типа 2ПМ-112, точно такая, какая используется в качестве электродвигателя Д. Якорь генератора замкнут на резистор R11=20 Ом. Пусковые резисторы, включенные последовательно с якорем электродвигателя, имеют следующие значения R5=10 Ом, R6=10 Ом. 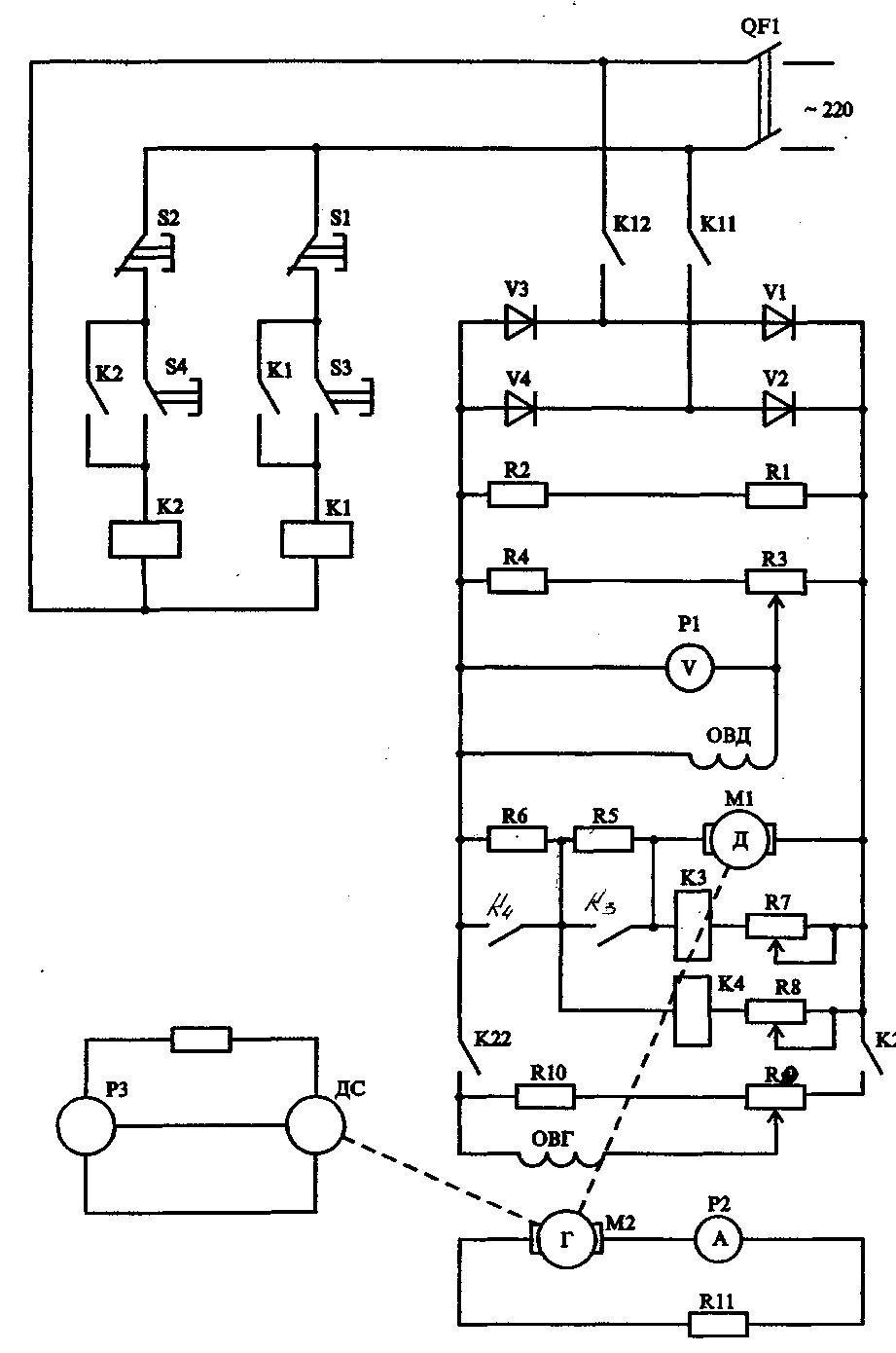 Рисунок 1.5- Принципиальная схема стенда 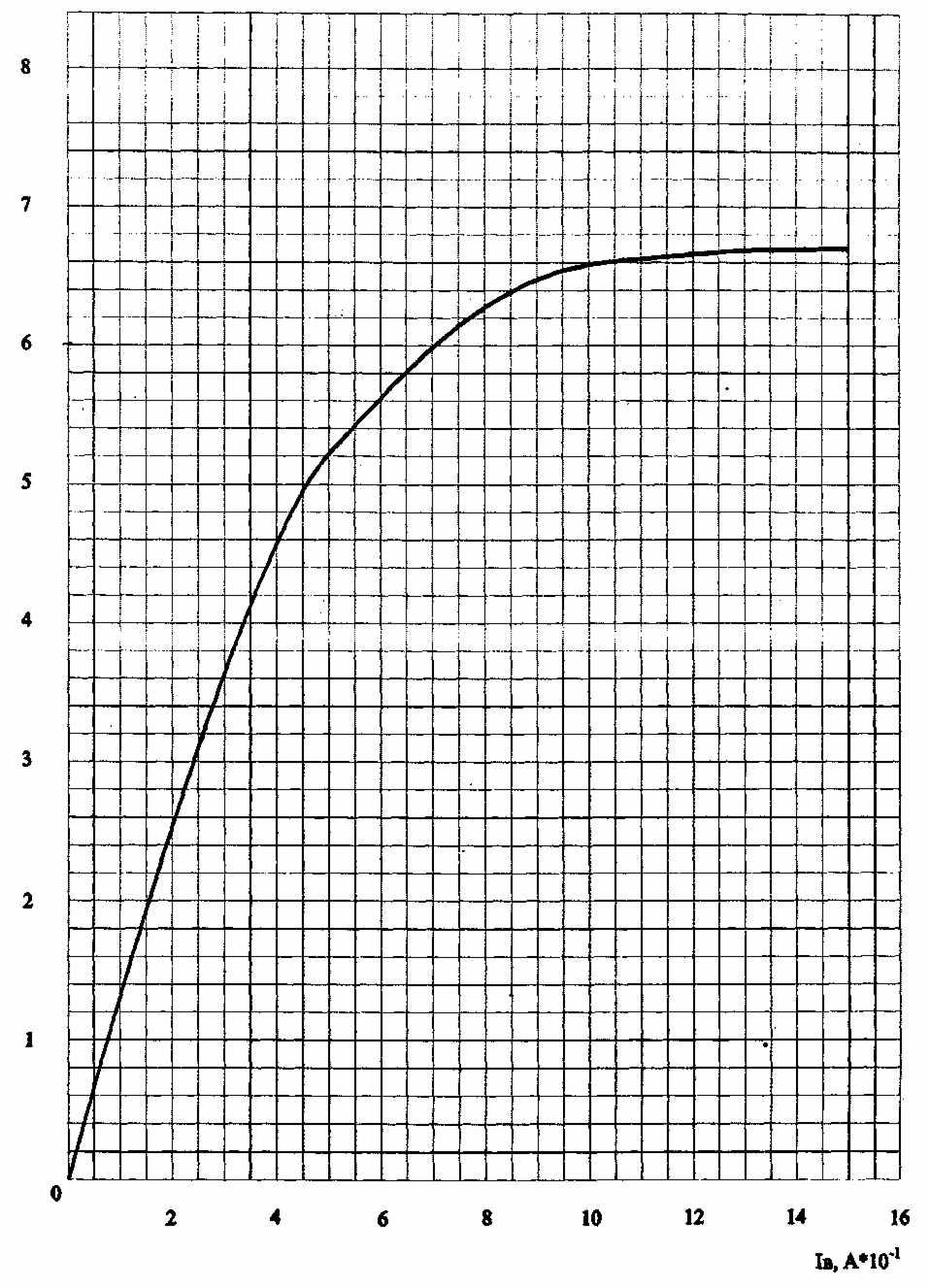 Рисунок 1.6 - Зависимость магнитного потока от тока Содержание отчета о проделанной работе Содержание отчета должно включать в себя следующее: 1. Цель работы. 2. Порядок выполнения работы. 3. Принципиальную схему стенда. 4. Результаты проведенной работы в виде таблиц, механических характеристик, построенных по экспериментальным данным и данным, полученным в результате расчета. 5. Выводы, полученные из сравнительного анализа полученных результатов. Изложение отчета должно быть последовательным, разделы отчета должны иметь между собой логическую связь. Все таблицы и рисунки (схемы, механические характеристики) должны быть пронумерованы и на них обязательно должны быть ссылки в тексте. Отчет должен быть аккуратно оформлен, текст написан разборчивым почерком, схемы и рисунки выполнены с применением инструментов (линейки, циркуля, лекала и т.п.) и отвечать требованиям соответствующих ГОСТов. Контрольные вопросы 1. Пояснить устройство машины постоянного тока, назначение основных частей, указать, из какого материала они изготовлены и почему. 2. Пояснить принцип действия электродвигателя и генератора постоянного тока. 3. Объяснить способы реверса двигателя постоянного тока. 4. Пояснить, как производится пуск в ход электродвигателя постоянного тока. 5. Почему перед пуском электродвигателя постоянного тока независимого возбуждения необходимо "ввести" реостат в цепь якоря и "вывести" реостат из цепи возбуждения. 6. Объяснить вид механических характеристик электродвигателей постоянного тока с различным возбуждением. 7. Объяснить способы регулирования скорости электродвигателей постоянного тока для каждого способа, указать направление регулирования. 8. Пояснить понятие "двухзонное регулирование скорости" для электродвигателей постоянного тока. 9. Вывести уравнение электромеханической и механической характеристик электродвигателя постоянного тока. 10. Каким образом можно перевести машину постоянного тока из двигательного режима в режим рекуперативного торможения (генераторный) и обратно? Пояснить отличия процессов, происходящих в машине постоянного тока в этих режимах. 11. Как перевести машину постоянного тока из двигательного режима в режим противовключения? Пояснить отличия, происходящих процессов в машине постоянного тока в этих режимах. 12. Как перевести машину постоянного тока в режим электродинамического торможения? Начертить схему и показать механические характеристики машины в этом режиме. Рекомендуемая литература 1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981.-576 с. 2. Брускин Д.Э., Зорохович А.Е., Хвостов B.C. Электрические машины. В 2-х частях.-М.: Высшая школа, 1979. 3. Каракулин, М. Л. Электромеханика и электротехническое оборудование учебное пособие / М. Л. Каракулин, Л. М. Лапина ; М-во образования и науки РК, Карагандинский государственный технический университет,. - Караганда: КарГТУ, 2008. – 130с. 4. Копылов В.В Электрические машины М.: Высшая школа, Логос, 2000. 5. Москаленко В.В. Автоматизированный электропривод м.: Энергоатомиздат,1985. Лабораторная работа № 2 изучение статических характеристик электропривода по системе Генератор-Двигатель (Г-Д) План проведения работы: 1. Исследование изучение статических характеристик электропривода по системе Генератор-Двигатель (Г-Д). 2. Изучение принципиальной схемы стенда. 3. Произвести измерения, необходимые для построения четырех электромеханических характеристик электропривода. Общие теоретические сведения Примером использования электромашинного преобразователя напряжения является система генератор-двигатель или сокращенно Г-Д, которая на практике получила широкое распространение. В качестве источника регулируемого напряжения в этом случае служит специальный генератор постоянного тока, мощность которого равна мощности двигателя постоянного тока. Генератор приводится во вращение асинхронным или синхронным двигателем. Зажимы якоря генератора непосредственно соединены с зажимами якоря двигателя. Питание обмоток возбуждения двигателя и генератора осуществляется от независимого источника постоянного тока. Таким источником может быть выпрямитель, подключённый к трёхфазной сети или специальный маломощный генератор постоянного тока называемый возбудителем, который приводится во вращение от того же двигателя, который вращает генератор. Схема установки Г-Д приведена на рисунке 2.1. 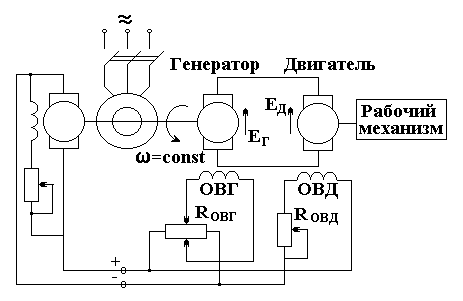 Рисунок 2.1 - Схема установки Г-Д Учитывая, что Ед = КФ запишем Ег - КФ = I (Rг + Rд). Выразим угловую скорость двигателя, получим уравнение электромеханической характеристики системы Г-Д. = Ег / КФ - I(Rг + Rд) / КФ. Учитывая, что для двигателя М = КФI, выразим отсюда ток и подставив его в уравнение электромеханической характеристики получим уравнение механической характеристики системы Г-Д: = Ег / КФ - M(Rг + Rд) / К2Ф2 При неизменном магнитном потоке зависимость = f (M) представляет собой прямую линию. Механические характеристики двигателя при изменении ЭДС генератора (изменении магнитного потока генератора) представляют собой семейство прямых линий, наклон которых к оси абсцисс остаётся постоянным и определяется общим сопротивлением якорной цепи. Скорость идеального холостого хода определяется выражением. 0 = Eг / КФ. Она может принимать любое значение, в зависимости от значения Eг, от 0 = Eг / КФ до - 0 = -Eг / КФ Для реверсирования двигателя необходимо изменить полярность ЭДС генератора. Отрицательное значение ЭДС генератора легко может быть получено при реверсировании тока возбуждения генератора изменением полярности напряжения на обмотке возбуждения генератора посредством переменного резистора Rовг. Механические характеристики располагаются во всех четырёх квадрантах осей координат и приведены на рисунке 2.2. 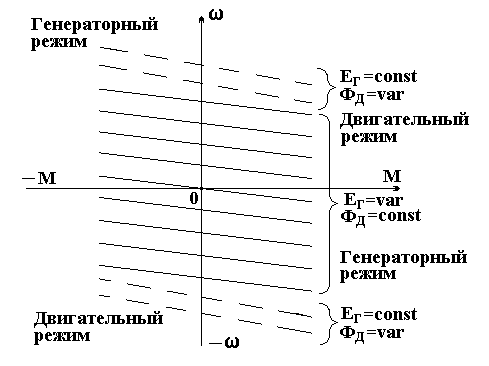 Рисунок 2.2- Механические характеристики системы Г-Д Важным достоинством этой системы является плавность регулирования, которая достигается регулированием тока возбуждения генератора. Система Г-Д может обеспечить и двух зонное регулирование. Регулирование в первой зоне осуществляется изменением ЭДС генератора от нуля до номинального значения при постоянном магнитном потоке возбуждения двигателя. Регулирование во второй зоне осуществляется путём изменения (уменьшения) тока возбуждения двигателя, при неизменной ЭДС генератора, угловая скорость при этом регулируется от номинальной в сторону увеличения. Верхний предел регулирования скорости с постоянным магнитным потоком двигателя ограничивается номинальным значением ЭДС генератора и тем перепадом скоростей, который обусловлен изменением нагрузки. Нижний предел регулирования определяется относительным перепадом скорости при заданном изменении нагрузки. Этот относительный перепад называется статизмом, определяется при минимальной угловой скорости для случая изменения момента нагрузки от номинального от нуля до Мн. =н / 0 min. В системе Г-Д двигатель может работать, как в двигательном, так и в тормозном, генераторном режиме в обоих направлениях. Тормозной, генераторный режим возникает, если ЭДС двигателя Ед становится больше ЭДС генератора Ег, он может быть достигнут в следующих случаях : 1. Если при движении электропривода уменьшить возбуждение генератора, двигатель же в силу инерции продолжает вращаться и Ед Ег 2. Если под действием внешнего момента (например, при спуске груза) двигатель разгоняется до скорости превышающей скорость идеального холостого хода. В обоих случаях в системе Г-Д генератор ускоряет вращение своего приводного двигателя переменного тока, переводя его в генераторный режим, заставляя отдавать энергию в сеть. Поэтому эти режимы называются режимами рекуперативного торможения. Этот вид торможения является основным в системе Г-Д . Режим динамического торможения достигается в системе Г-Д путём снятия возбуждения генератора (Фг = 0). В этом случае якорь генератора выступает в качестве активного сопротивления, на которое, оказывается, замкнут якорь двигателя. Характеристика соответствующая этому проходит через начало осей координат. Необходимость отметить, что в современных системах Г-Д, особенно большой мощности, нашло применение каскадное возбуждение, сущность которого заключается в использовании отдельных возбудителей для генератора и для двигателя. Каскадное возбуждение позволяет во много раз снизить мощность цепей управления, так как управление системой Г-Д осуществляют регулированием возбуждения возбудителей. При оценке экономичности регулирования, следует иметь ввиду, что в системе Г-Д осуществляется трёхкратное преобразование энергии. Каждая из ступеней преобразования сопровождается потерями энергии, общий суммарный КПД системы определится как произведение: г-д= Адгд. Здесь Ад – КПД асинхронного или синхронного приводного двигателя, г – КПД генератора постоянного тока, д – КПД двигателя постоянного тока. Результирующий КПД, особенно низок для электроприводов небольшой мощности. Для электроприводов средней и большой мощности он достигает (70 - 80)% . При однозонном регулировании диапазон регулирования составляет : 10 : 1 - 12 : 1 . При двухзонном регулировании : 10 : 1 - 25 : 1 . Верхний предел регулирования ограничен трудностями достижения устойчивой работы двигателя при малых значениях магнитного потока из-за размагничивающего действия реакции якоря. Расширение диапазона регулирования и обеспечение устойчивой работы двигателя при низких напряжениях и небольшом магнитном потоке достигается путём использования обратных связей с использованием систем автоматического регулирования. В этом случае диапазон регулирования может быть 100 : 1 и выше. Достоинствами системы Г-Д являются высокая плавность регулирования, удобство управления, относительно большой диапазон регулирования. К недостаткам системы Г-Д относят: 1. Двукратное преобразование энергии, что снижает КПД. 2. Наличие двух машин в преобразовательном агрегате, установленная мощность которых равна установленной мощности двигателя. 3. Значительные габариты и масса преобразовательной установки, необходимость в фундаменте. 4. Высокие капитальные и эксплуатационные расходы. Описание лабораторного стенда Стенд содержит электропривод, выполненный по системе Генератор-Двигатель, снабженный замкнутой системой автоматического регулирования скоростью подчиненного регулирования. Принципиальная схема стенда представлена на рисунке 2.3. Электромашинный преобразовательный агрегат (фактически представляющий источник постоянного тока с регулируемым выходным напряжением) состоит из асинхронного электродвигателя Ml, который приводит во вращение генератор постоянного тока Г1. Выводы якоря генератора Г1 подключены к якорю электродвигателя постянного тока М2. В качестве нагрузки на электродвигатель М2 служит генератор Г2, вал которого жестко соединен с валом электродвигателя М2. Измерение частоты вращения вала электродвигателя М2 производится при помощи импульсного датчика скорости ДС, информация с которого через преобразователь скорости ПСС поступает на указатель скорости www. Обмотка возбуждения генератора Г1 питается от тиристорного возбудителя ТП1, работой которого управляет система автоматического регулирования, выполненная в виде последовательно включенных регулятора скорости PC и регулятора тока РТ. Информация о частоте вращения вала электродвигателя М2 поступает в регулятор скорости с преобразователя сигнала скорости ПСС, а информация о значении тока якоря электродвигателя М2 поступает в регулятор тока РТ с датчика тока ДГ. Изменение уставок скорости электродвигателя М2 производится резистором R3C, посредством которого регулируется значение тока возбуждения генератора Г1 и тем самым изменяется напряжение на якоре генератора Г1 и якоря электродвигателя М2, при этом изменяется угловая скорость якоря М2. Таким способом осуществляется регулирование скорости электродвигателя М2 в первой зоне регулирования.  Рисунок 2.3 – Принципиальная схема стенда Обмотка возбуждения электродвигателя М2 питается неизменным током от отдельного источника возбуждения машины ИВМ. Обмотка возбуждения нагрузочного генератора Г2 подключена к специальному источнику - тиристорному преобразователю ТП-2, выходное напряжение которого регулируется посредством резистора R3H. Изменяя значение R3H, можно регулировать ток возбуждения генератора Г2, при этом изменяется мощность, отдаваемую генератором Г2 резистору RH. При этом изменяется нагрузочный момент, который создает генератор Г2 на валу электродвигателя М2. Переключатель Sн необходимо установить в положение 4, при этом положение переключателя Sз не влияет на работу схемы. Включение стенда производится выключателями S1 и S2, причем посредством S1 напряжение подается на электродвигатель Ml, а посредством S2 напряжение подается на систему управления. Для контроля работы схемы на стенде предусмотрены гнезда для подключения осциллографа. Все гнезда находятся под потенциалом 220В относительно корпуса стенда, поэтому корпус осциллографа должен быть изолирован от корпуса стенда. Подключение осциллографа и других измерительных приборов к гнездам должно производиться при выключенной схеме. Порядок выполнения работы 1. Изучить принципиальную схему стенда и ответить на контрольные вопросы, приведенные в конце настоящего методического указания. 2. Произвести измерения, необходимые для построения четырех электромеханических характеристик электропривода, соответствующих четырем следующим частотам вращения электродвигателя М2 при холостом ходе: n = nmax, n = nraax-100 об/мин, n =nmax - 200 об/мин, n = n -300 об/мин. Перед снятием электромеханических характеристик вначале установить (резистором R3C) одно из заданных значений частоты вращения вала электродвигателя М2 при отсутствии нагрузки, создаваемой генератором Г2 (ток якоря генератора Г2 должен быть равен нулю). После чего, изменяя ток возбуждения генератора Г2 (тем самым изменяя нагрузку на вал электродвигателя М2), произвести измерения частоты вращения и тока якоря электродвигателя М2.Результаты измерений оформить в виде таблицы 1. Примерный вид такой таблицы приведен ниже. Таблица 3.1 Электромеханическая и механическая характеристики при n =nmax
При определении значений момента воспользоваться техническими данными электродвигателя М2, приведенными ниже. Используя полученные результаты, построить четыре механические характеристики (в общих координатах) системы Г-Д и определить их жесткость. 3. При четырех значениях напряжения на якоре М2, соответствующих тем же значениям частот вращения, которые приняты в п.2, рассчитать и построить четыре механические характеристики для системы Г-Д установленной на стенде, которая выполнена на двух одинаковых машинах постоянного тока независимого возбуждения типа ГПН-112, имеющих следующие технические данные: Рн = 2,2 кВт n = 1500 об/мин Iн = 12 А VH = 220 В η=0,77 Фн = 0,0086 Вб Rя = 0,968 Ом Iвн = 1 А к=154н*м/Вб*А J=0,018кг*м2 Определить жесткость расчетных механических характеристик. Содержание отчета о проделанной работе Содержание отчета должно включать в себя следующее: 1. Цель работы. 2. Порядок выполнения работы. 3. Принципиальную схему стенда. 4. Результаты проведенной работы в виде таблиц, механических характеристик, построенных по экспериментальным данным и данным, полученным в результате расчета. 5. Выводы, полученные из сравнительного анализа полученных результатов. Изложение отчета должно быть последовательным, разделы отчета должны иметь между собой логическую связь. Все таблицы и рисунки (схемы, механические характеристики) должны быть пронумерованы и на них обязательно должны быть ссылки в тексте. Отчет должен быть аккуратно оформлен, текст написан разборчивым почерком, схемы и рисунки выполнены с применением инструментов (линейки, циркуля, лекала и т.п.) и отвечать требованиям соответствующих ГОСТов. Контрольные вопросы 1. Объяснить назначение системы Г-Д. 2. Что в системе Г-Д является источником регулируемого напряжения? 3. Каким образом в системе Г-Д осуществляется регулирование напряжения, прикладываемого к якорю электродвигателя? 4. Каким образом в системе Г-Д осуществляется реверсирование электродвигателя? 5. Посредством чего в системе Г-Д осуществляется регулирование скорости электродвигателя в первой зоне регулирования? 6. Каким образом в системе Г-Д осуществляется регулирование скорости электродвигателя во второй зоне регулирования? 7. Каким образом в системе Г-Д электродвигатель может быть переведен в режим рекуперативного торможения (генераторный режим)? 8. Как в системе Г-Д происходит передача энергии от электродвигателя в сеть в режиме рекуперативного торможения? 9. Каким образом в системе Г-Д электродвигатель переводится в режим электродинамического торможения? 10. Где в системе Г-Д рассеивается энергия торможения при работе электродвигателя в режиме электродинамического торможения? Рекомендуемая литература 1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981.-576 с. 2. Брускин Д.Э., Зорохович А.Е., Хвостов B.C. Электрические машины. В 2-х частях.-М.: Высшая школа, 1979. 3. Каракулин, М. Л. Электромеханика и электротехническое оборудование учебное пособие / М. Л. Каракулин, Л. М. Лапина ; М-во образования и науки РК, Карагандинский государственный технический университет,. - Караганда : КарГТУ, 2008. – 130с. 4. Копылов В.В Электрические машины М.: Высшая школа, Логос, 2000. 5. Москаленко В.В. Автоматизированный электропривод м.: Энергоатомиздат,1985. ЛАБОРАТОРНАЯ РАБОТА № 3 Изучение статических характеристик однофазного комплектного тиристорного электропривода План проведения работы: 1. Изучение статических характеристик однофазного комплектного тиристорного электропривода. 2. Изучение принципиальной схемы стенда. 3. Произвести измерения, необходимые для построения необходимые для построения трех электромеханических характеристик электропривода. Краткие теоретические сведения Однофазный двухполупериодный управляемый выпрямитель Регулирование постоянного напряжения на выходе осуществляется изменением угла включения вентилей. В качестве управляемых вентилей в большинстве случаев используют тиристоры. В качестве источника регулируемого напряжения для питания двигателя используются управляемый выпрямитель. Принцип регулирования выходного напряжения рассмотрим на примере однофазной двухполупериодной схемы выпрямления, которая приведена на рисунке 3.1. 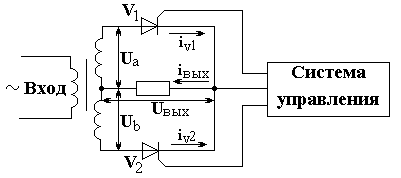 Рисунок 3.1- Однофазная двухполупериодная схема выпрямления Ниже на рисунке 3.2 представлены графики напряжения и тока на активной нагрузке. Пусть на управляющий электрод тиристора V1 подаётся управляющий импульс от системы управления в момент t1. Вентиль V1 откроется, что вызовет на нагрузке скачок напряжения, которое будет изменяться по кривой Ua . В момент t2 напряжение Ua становится равным нулю и тиристор V1 закрывается. На интервале t2 - t3 оба тиристора закрыты и ток через нагрузку равен нулю. В момент t3 под действием импульса управления открывается тиристор V2 , он остаётся открытым до момента t4, далее в момент t5 вновь открывается тиристор V1. При активной нагрузке кривая выпрямленного тока повторяет кривую выпрямленного напряжения. 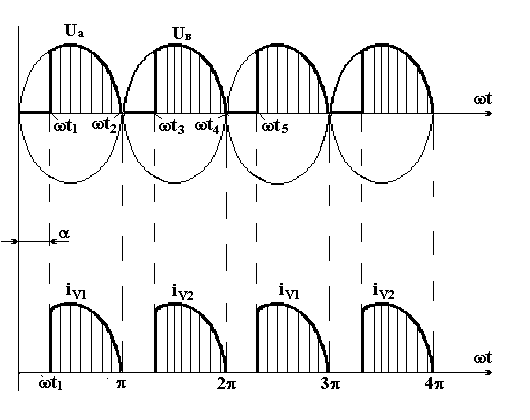 Рисунок 3.2 - Графики напряжения и тока на активной нагрузке Угол отсчитывается от момента естественного включения вентиля до момента включения его под действием управляющего импульса. Если изменяется угол , то соответственно изменяется среднее значение выпрямленного напряжения. Если же учесть индуктивность обмотки якоря двигателя, индуктивность обмоток трансформатора, то графики изменения напряжения и тока преобразователя будут иметь более сложную форму. Ниже на рисунке 3.3 представлены графики напряжения и тока для случая активно-индуктивной нагрузки, причём индуктивность нагрузки достаточно велика, чтобы ток нагрузки можно считать идеально сглаженным. Наличие индуктивности в нагрузке приводит к тому, что после прохождения напряжения на вторичной полу обмотке через нуль, в находящемся в проводящем состоянии вентиле продолжает протекать ток за счёт энергии накопленной в индуктивности. При достаточно большой индуктивности нагрузки этот вентиль будет открыт до тех пор, пока не будет подан управляющий импульс на второй вентиль, тогда второй вентиль включится, а первый отключится.  | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||