аа. М.У. по пр_ч1. Методические указания к лабораторным работам по дисциплине Электромеханика и электротехническое оборудование
 Скачать 0.52 Mb. Скачать 0.52 Mb.
|

|
Реостатное регулирование При этом способе регулирования в цепь фазного ротора вводится трехфазный реостат. Плавность регулирования зависит от числа ступеней реостата. Чаще всего в качестве реостата используют металлические резисторы, сопротивление реостата изменяется дискретно при помощи контакторов. Плавность регулирования тем выше, чем больше ступеней у реостата. Для двигателей средней и большой мощности иногда используют жидкостный реостат, сопротивление которого может изменятся плавно, бесступенчато. Однако жидкостные реостаты из-за нестабильности сопротивления электролита, громоздкости реостата, повышенной инерционности регулирования, не нашли широкого применения. Принципиальная схема включения асинхронного трёхфазного электродвигателя с фазным ротором и примерный вид механических характеристик представлены ниже на рисунке 4.2. 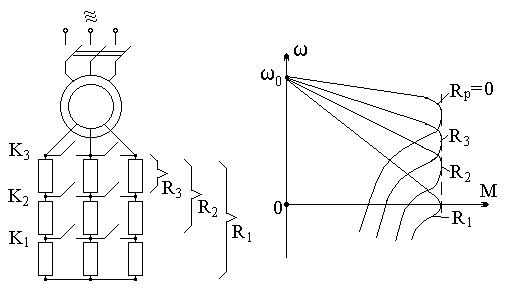 Рисунок 4.2 Регулирование угловой скорости изменением напряжения Для реализации этого способа необходимо устройство, при помощи которого можно изменять напряжение, подаваемое к статору асинхронного двигателя. В качестве этого устройства может быть автотрансформатор, реакторы насыщения, импульсные регуляторы и др. 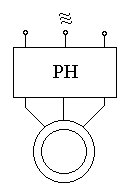 Максимальный момент при изменении напряжения меняется пропорционально квадрату напряжения: Мmax i = Mmax (Ui /Uн)2 Механические характеристики при изменении напряжения асинхронного короткозамкнутого двигателя приведены на рисунке 6.3:  Рисунок 4.3 Регулирование угловой скорости при этом способе происходит за счёт изменения жёсткости механических характеристик, и осуществляться вниз от номинальной скорости. Плавность регулирования определяется плавностью изменения напряжения источником. Предел регулирования весьма ограничен. Этот способ характеризуется большими потерями энергии в роторе, поэтому допустимый момент резко уменьшается по мере роста скольжения. В связи с этим этот способ регулирования можно использовать в асинхронных короткозамкнутых двигателях только при малой мощности двигателей. Лучшее использование двигателя и более благоприятные характеристики получаются при реализации этого способа для двигателей с фазным ротором, при включении в цепь ротора нерегулируемого резистора, схема представлена ниже: 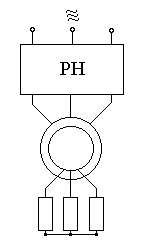 Потери энергии при этом получаются примерно такими же, как и при реостатном регулировании, причём потери энергии в основном выделяются в реостате, что увеличивает допустимый момент. Преимуществом этого способа по сравнению с реостатным заключается в плавном управлении двигателем и отсутствии контактной аппаратуры. К недостаткам этого способа относят: 1.Недоиспользование двигателя по скорости. 2. Недоиспользование по мощности. 3.Недостаточная стабильность скорости при отклонениях момента нагрузки. Механические характеристики приведены на рисунке 6.4:  Рисунок 4.4 Для регулирования напряжения используется реакторы насыщения, автотрансформаторы, импульсные регуляторы на тиристорах, а также тиристорные регуляторы с фазным управлением. Регулирование скорости переключением числа пар полюсов обмотки статора. Скорость ротора асинхронного двигателя зависит от скорости вращения магнитного поля статора, которая в свою очередь зависит от частоты тока и числа пар магнитных полюсов магнитного поля статора. n0 = 60f1/ P или 0 = 2f1/ P . следовательно, угловую скорость ротора можно изменять путём изменения угловой скорости магнитного поля статора. Поскольку число пар магнитных полюсов статора может быть только целым числом, то таким способом можно осуществлять регулирование только ступенчато. Необходимо отметить, что этим способом можно регулировать скорость практически только в двигателях с короткозамкнутым ротором, Поскольку в них при изменении числа пар полюсов магнитного поля статора, обмотки ротора автоматически приспосабливаются к ним, т.е. сколько полюсов в статоре, столько будет и в короткозамкнутом роторе. Если же использовать двигатель с фазным ротором, то при переключении числа пар полюсов на статоре, необходимо производить переключение числа пар полюсов и в обмотке ротора, что приведёт к усложнению конструкции ротора. Переключение числа пар полюсов производится путём изменения тока в отдельных половинах каждой фазной обмотки статора. Для реализации способа регулирования скорости посредством переключения числа пар полюсов магнитного поля статора, необходимы специальные асинхронные двигатели с короткозамкнутым ротором, у которых на статоре находятся одна или две обмотки, позволяющие переключать число полюсов магнитного поля. Минимальная синхронная скорость, с которой выпускаются полюсопереключаемые двигатели, равна 500 об/мин. Максимальная скорость вращения равна 3000 об/мин. При одной и той же мощности снижение скорости вращения ведёт к увеличению габаритов двигателя и к ухудшению его энергетических показателей. Практически диапазон регулирования не превышает 6:1 (3000:500 об/мин.). Регулирование скорости этим способом является ступенчатым, причём отличается экономичностью. Регулирование угловой скорости и асинхронного электропривода изменением частоты напряжения статора. Изменение частоты напряжения подводимого к статору в сторону увеличения, так и в сторону уменьшения от основной скорости. Частное регулирование является наиболее перспективным способом изменения скорости. При регулировании частоты, возникает необходимость и в изменении значения напряжения, подаваемого на статор. Это объясняется тем, что: U1 E1 = 4,44 f1 W1Ф значение магнитного потока двигателя пропорционально приложенному к статору напряжению и его частоте. Поэтому для поддержания постоянного по значению магнитного потока Ф = const необходимо изменение напряжения, при изменении его частоты. Если этого не делать, то при уменьшении частоты возрастает магнитный поток, что ведёт к насыщению магнитной системы машины и к увеличению тока намагничивания статора. При этом ухудшается энергетические показатели двигателя. Увеличение частоты приводит к уменьшению магнитного потока, что при неизменном нагрузочном моменте, вызывает возрастание тока ротора, перегружает его обмотки, снижает максимальный момент и перегрузочную способность двигателя. Выбор закона изменения напряжения определяется характером изменения нагрузочного момента. Можно выделить три основных способа регулирования напряжения при изменении его частоты: 1. При U / f = const, т.е. при увеличении f пропорционально увеличивается и напряжение U, при этом значение вращающего момента остаётся постоянным Мс = const. Так называемое регулирование скорости при постоянном моменте. Механические характеристики асинхронного электродвигателя для этого случая приведены на рисунке 4.5. 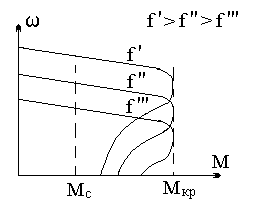 Рисунок 6.5 2. При выполнении U2/ f = const, остаётся постоянной потребляемая двигателем мощность, так называемое регулирование скорости при постоянной мощности. Механические характеристики регулирования при постоянной мощности представлены на рисунке 4.6. 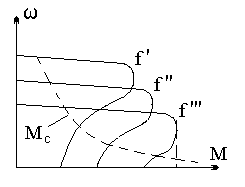 Рисунок 4.6 3. При выполнении U/ f12 = const, этот способ применяется для вентиляторной нагрузки. Ниже приведены механические характеристики электродвигателя, соответствующие этому способу регулирования. 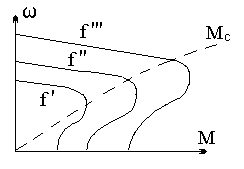 Рисунок 4.7 Регулирование угловой скорости для двигателей, рассчитанных на частоту f = 50 Гц допустимо в 1,5 - 2,0 раза выше номинальной. Указанное ограничение обусловлено конечной прочностью крепления обмотки ротора, а также повышенными потерями мощности в стали. Регулирование скорости ниже номинальной, ограничивается нестабильностью работы двигателя, в связи с этим диапазон регулирования составляет: D = 1:10 1:15. В замкнутых системах частотного управления могут быть получены механические характеристики требуемого качества в диапазоне 10000: 1 и более. Частотный способ регулирования позволяет получить жёсткие механические характеристики, с минимальными потерями мощности, высокую плавность регулирования. Основной недостаток этого способа - необходимость иметь специальный преобразователь частоты. Для преобразования частоты, используют, как статические вентильные преобразователи, так и электромашинные. Описание лабораторного стенда Принципиальная схема стенда представлена на рисунке 6.8, Стенд содержит асинхронный электродвигатель АД с короткозамкнутым ротором, обмотка статора которого подключена к трехфазной сети через контакты К магнитного пускателя. Для создания нагрузочного момента на электродвигатель АД используется нагрузочная машина НМ, представляющая собой генератор постоянного тока независимого возбуждения, вал которого жестко соединен с валом электродвигателя АД (на схеме вал показан пунктиром). Якорь генератора НМ через амперметр замкнут на нерегулируемый резистор Rh. Для измерения частоты вращения вала электродвигателя на нем установлен импульсный датчик скорости Д, Для преобразования сигнала с датчика Д из импульсной формы в аналоговую используется преобразователь сигналов ПСС, который затем регистрируется прибором W. Обмотка возбуждения ОВНМ генератора НМ питается от тиристорного регулятора ТР. Тиристорный регулятор управляется рукояткой, посредством которой можно регулировать ток обмотки возбуждения ОВНМ, за счет этого изменяется отдаваемая мощность генератора НМ, следовательно, и тормозной момент, создаваемый генератором НМ на валу электродвигателя АД. Подключение статора асинхронного электродвигателя АД к трехфазной сети производится контактами К магнитного пускателя, втягивающая катушка К которого подключается к сети контактом Р1 реле. Для управления катушкой Р1 реле необходимо собрать схему, включающую в себя кнопки 'Пуск", "Стоп" и блокирующий контакт Р1. Питание этой схемы осуществляется от сети переменного тока через понижающий трансформатор Т1 и диодный мост Д9-Д12. Подключение цепи питания тиристорного регулятора ТР производится контактом Р2 реле Р2. Для управления катушкой реле Р2 также необходимо; собрать схему, включающую в себя другие кнопки "Пуск" и "Стоп" и блокировочный контакт Р2 реле Р2. Питание этой схемы осуществляется с выхода диодного моста Д13-Д16. 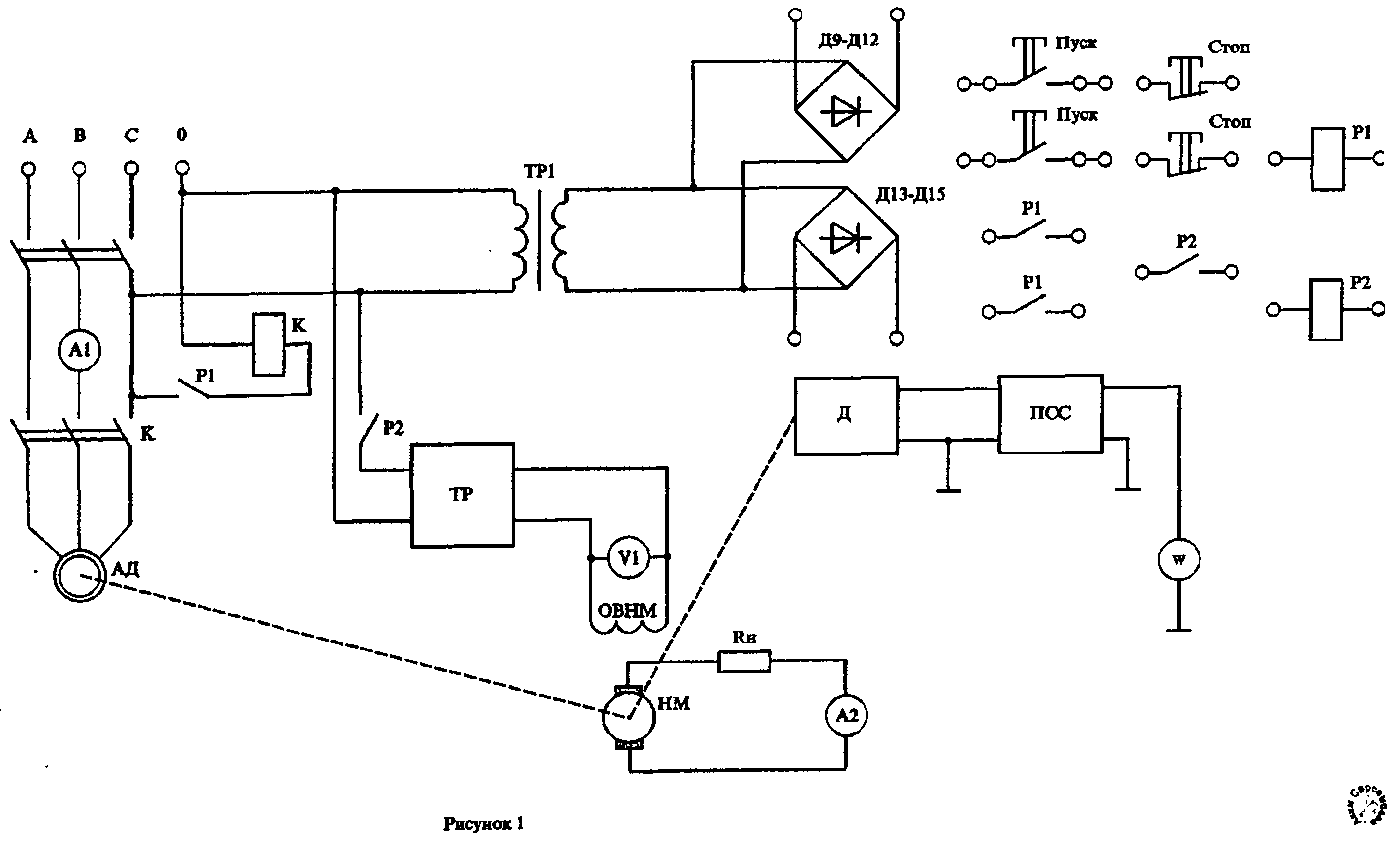 Рисунок 4.8- Принципиальная схема стенда Порядок выполнения работы 1. Изучить принципиальную схему стенда и ответить на контрольные вопросы, приведенные в конце настоящего методического указания. 2. Собрать схему управления стендом. 3. Произвести измерения, необходимые для построения рабочего участка электромеханической и механической характеристик асинхронного электродвигателя с короткозамкнутым ротором. При снятии характеристик вначале установить режим холостого хода асинхронного электродвигателя, отключив посредством контакта Р2 питание обмотки возбуждения нагрузочного генератора (ток якоря генератора НМ должен быть равен нулю). Затем, подключив обмотку возбуждения и регулируя ток в ней (резистором R), тем самым изменяя нагрузочный момент, создаваемый генератором НМ на валу электродвигателя АД от минимального до максимального, снять остальные точки характеристик (ток якоря генератора изменять ступенями через 2 ампера до максимального). Результаты измерений оформить в виде таблицы 6.1. Примерный вид таблицы приведен ниже. Таблица 6.1 Электромеханическая и механическая характеристики
При определении значений нагрузочного момента, создаваемого генератором НМ на валу электродвигателя АД, принять во внимание, что значение нагрузочного резистора RH=20 Ом, а КПД нагрузочного генератора равно ηнг=0.9 4. Согласно данным, полученным в результате эксперимента и расчета, построить электромеханическую и механическую характеристики асинхронного электродвигателя с короткозамкнутым ротором. Определить жесткость механической характеристики в режиме холостого хода и при максимальной нагрузке. Содержание отчета о проделанной работе Отчет должен включать в себя следующее: 1. Цель работы. 2. Порядок выполнения работы. 3. Принципиальная схема стенда. 4. Результаты проведенной работы в виде таблиц, электромеханической и механической характеристик, построенных по экспериментальным данным и данным, полученным в результате расчета. 5. Выводы, полученные из анализа построенных характеристик. Изложение отчета должно быть последовательным, разделы отчета должны иметь между собой логическую связь. Все таблицы и рисунки (схемы, механические характеристики) должны быть пронумерованы и на них обязательно должны быть ссылки в тексте. Отчет должен быть аккуратно оформлен, текст написан разборчивым почерком, схемы и рисунки выполнены с применением инструментов (линейки, циркуля, лекала и т.п.) и отвечать требованиям соответствующих ГОСТов. Контрольные вопросы 1. Пояснить устройство асинхронных машин с короткозамкнутым ротором и с фазным ротором. 2. Пояснить принцип действия асинхронного электродвигателя. Что такое скольжение? По какой формуле определяется угловая скорость вращения магнитного поля статора? 3. Почему двигатель называется асинхронным, почему у асинхронного двигателя скорость вращения ротора всегда меньше скорости вращения магнитного поля статора? 4. Пояснить, как производится реверс асинхронного электродвигателя. 5. Пояснить вид механических характеристик асинхронного электродвигателя (естественной и реостатных), указать характерные точки, устойчивые и неустойчивые участки. 6. Как практически достичь режима идеального холостого хода? 7. Объяснить все способы пуска асинхронного электродвигателя с короткозамкнутым ротором, начертить принципиальные схемы, обеспечивающие пуск. 8. Объяснить, как производится пуск асинхронного электродвигателя с фазным ротором, пояснить движение рабочей точки при пуске на реостатных и естественной механических характеристиках. 9. Объяснить все способы регулирования скорости асинхронных электродвигателей с короткозамкнутым и фазным роторами. Показать вид искусственных механических характеристик при различных способах регулирования скорости. 10. Пояснить вывод и структуру формул Клосса (зависимостей момента от скольжения). 11. Каким образом можно перевести асинхронную машину из двигательного режима в режим рекуперативного торможения (генераторный) и обратно? Пояснить вид механических характеристик в этих режимах. Пояснить отличие процессов, происходящих в асинхронной машине в этих режимах. 12. Как перевести асинхронную машину из двигательного режима в режим противовключения (два способа)? Пояснить движение рабочей точки на механических характеристиках при переходе машины из двигательного режима в режим противовключения. 13. Как перевести асинхронную машину в режим электродинамического торможения (два способа)? Начертить принципиальные электрические схемы, поясняющие работу асинхронной машины в режиме электродинамического торможения с независимым возбуждением и с самовозбуждением. Пояснить процессы, происходящие при этом в асинхронной машине. 14. Пояснить вид механических характеристик асинхронной машины в режиме электродинамического торможения с независимым возбуждением и с самовозбуждением. 15. Какие существуют способы регулирования частоты вращения асинхронных двигателей? Рекомендуемая литература 1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981.-576 с. 2. Брускин Д.Э., Зорохович А.Е., Хвостов B.C. Электрические машины. В 2-х частях. -М.: Высшая школа, 1979. 3. Каракулин, М. Л. Электромеханика и электротехническое оборудование учебное пособие / М. Л. Каракулин, Л. М. Лапина ; М-во образования и науки РК, Карагандинский государственный технический университет,. - Караганда: КарГТУ, 2008. – 130с. 4. Копылов В.В Электрические машины М.: Высшая школа, Логос, 2000. 5. Москаленко В.В. Автоматизированный электропривод м.: Энергоатомиздат,1985. Рассмотрено на заседании кафедры Одобрено учебно-методическим советом АПП ФЭАТ Протокол №____________ Протокол №____________ “____” ___________ 2017 г. “____” ___________ 2017 г. Зав. кафедрой АПП Председатель учебно-методического совета ФЭАТ ______________ Брейдо И.В. ______________. МЕТОДИЧЕСКИЕ УКАЗАНИЯ к лабораторным работам по дисциплине «Электромеханика и электротехническое оборудование» для студентов специальности 5В071800 Разработали: Каракулин М.Л., Лапина Л.М. Редактор Искакова Р.С. Гос. изд. лиц. № 50 от 31.03.2004. Подписано в печать 12.07.2010 Формат 60×90×16 Тираж 20 экз. Объем 1,8 уч.-изд. л. Заказ № 4521 Цена договорная (Печатно-множительная мастерская КарГТУ. Караганда, Бульвар Мира, 56) | |||||||||||||||||||||||||||||||||||||||||||||||||