Методичка. Методические указания по изучению разделов и тем курса Исполнительные механизмы систем управления
 Скачать 1.73 Mb. Скачать 1.73 Mb.
|

|
БИБЛИОГРАФИЧЕСКИЙ СПИСОК Армейский, Е. В. Электрические микромашины / Е. В. Армейский, Г. Б. Фалк. - М.: Высшая школа, 1985. - 238 с. Армейский, Е. В. Электромеханические устройства автоматики / Е. В. Армейский, Г. Б. Фалк. - М. : МГИЭМ, 2002. - 214 с. Башарин, А. В. Управление электроприводами / А. В. Башарин, В. А. Новиков, Г. Г. Соколовский. - Л. : Энергоиздат. Ленингр. отд.. 1982. - 92 с. Богачев, Ю. П. Мехатронные технологические машины в машиностроении / Ю. П. Богачев, О. С. Сироткин, Ю. В. Подураев // Мехатроника, автоматизация, управление. - 2003. - № 4. - С. 4. Вишневский, В. С. Пьезоэлектрические двигатели / В. С. Вишневский, И. А. Карташев, В. В. Лавриненка. - М. : Энергия, 1980. - 110 с. Волков, Н. И. Электромашинные устройства автоматики / Н. И. Волков, В. П. Миловзоров. -М.: Высш. школа. 1986. - 336 с. Дискретный электропривод с шаговыми двигателями / под ред. М. Г. Чи-ликина. - М.: Энергия, 1971. Кенио, Т. Шаговые двигатели и их микропроцессорные системы управления / Т. Кенио. - М. : Энергоатомиздат, 1987. Юферов, Ю. М. Электрические машины автоматических устройств / Ю. М. Юферов. - М.: Высшая школа, 1988. Иванов, С. С. Справочник по муфтам / С. С. Иванов, О. А. Ряховский. -Л.: Политехника, 1991. - 383 с. Коваленко, В. А. Пьезоэлектрические двигатели вращения - мехатрон-ный элемент автоматических систем / В. А. Коваленко, А. Г. Орлов // Мехатроника. - М. : Машиностроение, 2000. - № 2. -6 с. Колпашников, С. Н. Схваты промышленных роботов / С. Н. Колпашни-ков, И. Б. Челпанов. - Л. : Машиностроение, Ленингр. отд., 1989. -286 с. Коновалов, Л. И. Элементы и системы электроавтоматики / Л. И. Коновалов, Д. П. Петелин. - М. : Высшая школа, 1985. - С. 16. Лебедев, А. М. Следящие электроприводы станков с ЧГГУ / А. М. Лебедев, Р. Т. Орлова, А. В. Пальцев. - М. : Энергоатомиздат, 1988. - 223 с. Лихачев, В. Л. Электродвигатели асинхронные В. Л. Лихачев. -Вып. 60. - М. : Солон Пресс, 2003. - 304 с. - (Серия «Ремонт»). Подураев, Ю. В. Основы мехатроники ' Ю. В. Подураев. - М. : МГТУ СТАНКИН, 1999. 82 - систему автоматического регулирования основных параметров ИМ; - отдельные блоки электрических измерений, защиты и сигнализации; исполнительный двигатель постоянного тока (коллекторный или бесконтактный), или трехфазный асинхронный со встроенным или пристраиваемым датчиком скорости (тахогенератором электромашинного или фотоэлектрического типа), датчиком положения (вращающимся трансформатором, сельсином или фотоэлектрическим преобразователем) и, при необходимости, электромагнитным тормозом; механическое передаточное устройство (преобразователь движения вращательного или вращательно-поступательного типа, муфта) в виде отдельной конструкции или в виде единой конструкции с двигателем (мотор-редуктор). Электрооборудование первых пяти групп выполняется обычно в виде комплекта устройств управления (шкафов, блоков, пультов), объединенных общей электрической схемой и обеспечивающих необходимое взаимодействие всех элементов исполнительного механизма. Этот комплект является, как правило, обязательной составной частью комплектного ИМ, а его выход - выходом силового электрического преобразователя. В исполнительных механизмах узкого назначения или малой мощности электродвигатель и передаточное устройство входят непосредственно в комплект поставки, в остальных случаях заказываются отдельно. Унифицированные электромашинные исполнительные механизмы, применяемые для перемещения регулирующих органов типа заслонок, задвижек, кранов и т.д. в химической промышленности, на топливных и водно-канализационных трубопроводах, в вентиляционных системах и силовой контактной электрокоммутирующей аппаратуре имеют, как правило, в своем составе следующие блоки типовой структуры: комплект из однофазного или трехфазного асинхронного двигателя и передаточного устройства с вращательным или возвратно-поступательным выходным движением; силовой электрический блок в виде контактной или бесконтактной коммутирующей аппаратуры и при необходимости различных усилителей; устройство управления с блоками дистанционного и ручного управления, а также блоками сигнализации и защиты; измерительно-преобразовательное устройство с концевыми и путевыми выключателями и, при необходимости, резистивными, индуктивными и токовыми схемами измерения текущего положения и скорости. 11 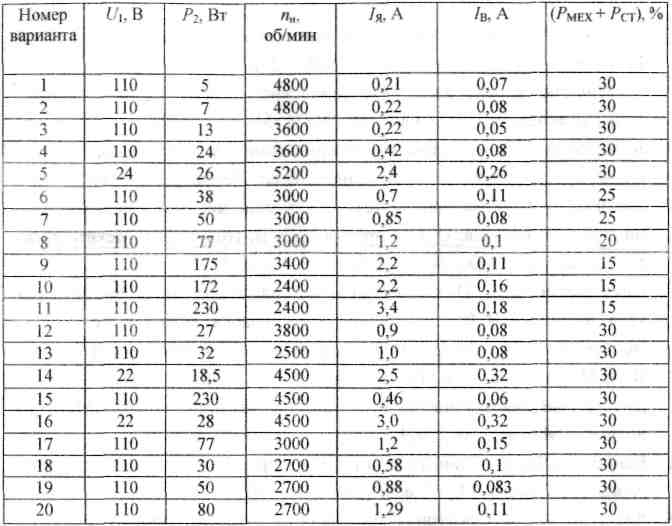 Таблица 7.3 Такие ИМ работают в основном в режиме позиционирования с нерегулируемой или регулируемой в узком диапазоне скоростью. Требования к электромашинным исполнительным механизмам. Основные требования к большинству электромашинных ИМ можно сформулировать так: - минимальные габариты электродвигателя при высоких значениях вращающего момента и мощности; - значительные допустимые перегрузки привода в кратковременном и повторно-кратковременном режимах работы; широкий диапазон регулирования скорости; высокая стабильность характеристик, в первую очередь, силового преобразователя, датчиков скорости и положения (перемещения); высокое быстродействие при апериодическом характере переходных процессов разгона и торможения; высокое быстродействие при включении и сбросе нагрузки и при реверсе под нагрузкой; высокая равномерность движения при различной нагрузке на всех скоростях, вплоть до самых малых; удобство конструктивной установки двигателей и встройки силовых преобразователей и вспомогательных блоков управления в шкафы управления объектом в целом; малые габаритные размеры и расход активных, особенно дефицитных, материалов; высокая надежность и ремонтопригодность, существенная унификация узлов, простота наладки и эксплуатации; малая стоимость и энергоемкость. Очевидно, что совмещение всех перечисленных требований в одном устройстве принципиально невозможно. Поэтому при проектировании и применении исполнительных механизмов в каждом конкретном случае удовлетворение одних требований достигается в ущерб другим. Это значит, что при создании ИМ должна решаться задача оптимизации с конкретными ограничениями, вытекающими из общих требований. 1.3 Общие сведения об электромашинных устройствах исполнительных механизмов Классификация электромашинных устройств Подавляющее большинство электромеханических устройств составляют электромашинные устройства. Электромеханические устройства - это 12 Примечание. U\ - напряжение управления; Р2 - полезная мощность на валу; nн - номинальная скорость вращения вала; Iя, Iв - токи якоря и возбуждения; мощности Р2. При расчетах требуемой мощности двигателя момент инерции его совместно с редуктором для маломощных двигателей принимают Таблица 7.2 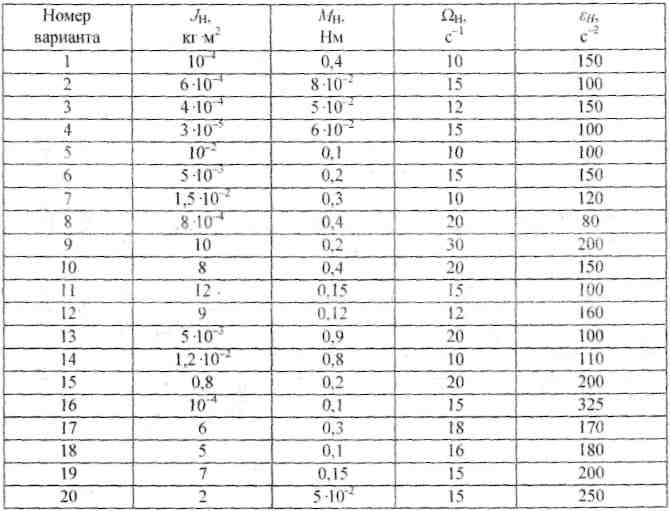 Примечание. ческий момент нагрузки; ловое ускорение нагрузки. При выборе типа исполнительного двигателя можно руководствоваться справочными данными приложений (таблицы П.1-П.6). Задача 2. Микродвигатель постоянного тока параллельного возбуждения имеет данные, приведенные в таблице 7.3. Требуется определить ток холостого хода, сопротивления обмоток якоря и возбуждения, номинальный момент на валу электродвигателя (Нм), скорость вращения якоря двигателя при холостом ходе, КПД двигателя, пояснить его принцип действия, показать направление потоков и вращающего момента, задавшись направлением токов в обмотках якоря и возбуждения. 80 класс технических средств автоматизации и управления, в основе работы которых лежит электромеханическое преобразование энергии и сигналов. В таких устройствах электромеханическое преобразование, как правило, сопровождается электромагнитным преобразованием энергии. Электромашинные устройства - это подкласс технических средств, включающий в себя как классические электрические машины (двигатели. генераторы), так и специальные устройства, выполненные на базе электрической машины и предназначенные для различных функциональных преобразований в системах автоматического управления. Электрическая машина - это электромеханический преобразователь энергии, состоящий из ряда взаимодействующих электромагнитных контуров, часть из которых неподвижна, а часть перемещается. Электрическая машина является обратимой, т.е. может работать в двух основных режимах: двигателя-преобразователя электрической энергии в механическую и генератора-преобразователя механической энергии в электрическую. Кроме этого, возможны специальные тормозные режимы работы электрической машины. В большинстве электрических машин, в том числе в двигателях, перемещение контуров вращательное. Вращающиеся двигатели просты по конструкции и надежны в эксплуатации. Однако если в технологическом оборудовании происходит поступательное движение, к двигателю подсоединяют механический преобразователь вращательного движения в поступательное. Это усложняет схему привода. Без механического преобразователя можно обойтись, если сам двигатель будет преобразовывать электрическую энергию в механическую поступательного движения. Такие двигатели называют линейными. По выходной мощности электрические машины можно разделить на следующие группы: микромашины - до 0,75 кВт, машины малой мощности -от 0,75 до 10 кВт. машины средней мощности - от 10 кВт до сотен киловатт, машины большой мощности - более сотен киловатт. По частоте вращения машины подразделяются на тихоходные - с частотой вращения до 300 об/мин, средней быстроходности - 300-1500 об/мин, быстроходные - 1500-6000 об/мин и сверхбыстроходные - свыше 6000 об/мин. По степени защиты от внешних воздействий конструктивное выполнение электрических машин может быть защищенное, брызгозащищен-ное, каплезащищенное. водозащищенное, пылезащищенное, закрытое, герметичное и взрывозащищенное. Например, машины защищенного выпол- 13 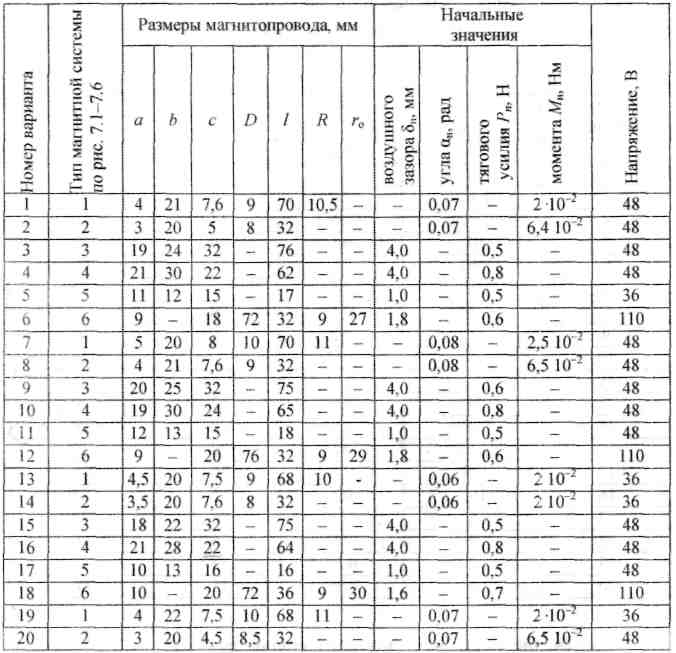 Таблица 7.1 нения могут устанавливаться только в закрытых помещениях, т.к. не имеют защитных приспособлений от попадания дождя внутрь машины. В то же время герметичные машины выполняются с особо плотной изоляцией внутреннего пространства от окружающей среды и могут работать под водой, в газовых камерах. По способу охлаждения различают машины с естественным и искусственным охлаждением. Охлаждение необходимо для предотвращения недопустимого нагрева, вызываемого потерями мощности в электрической машине. Электрические микромашины обычно охлаждаются за счет естественного теплообмена с окружающей средой (естественное охлаждение). Машины большей мощности имеют искусственное охлаждение, в основном воздушное. Классификация по функциональному признаку существенно связана с уровнем мощности машин. Среди электромашинных устройств исполнительных механизмов значительную долю составляют электрические микромашины. Поэтому в качестве примера рассмотрим функциональную классификацию микромашин, определяющую их назначение и области применения.  [А Электрические микромашины исполнительных механизмов (рис. 1.4) делятся на две подгруппы: 1) силовые микромашины, преобразующие электрический сигнал в механический; 2) информационные микромашины, преобразующие механический сигнал (угол поворота, угловую скорость и угловое ускорение) в электрический сигнал. Контрольная работа № 2 «Выбор исполнительного электродвигателя постоянного тока и расчет его характеристик» Задача 1. Заданы механические параметры объекта управления (таблица 7.2), являющегося нагрузкой исполнительного механизма на базе электропривода с редуктором. Требуется: По данным нагрузки подсчитать требуемую мощность, выбрать тип электродвигателя и привести его технические характеристики. Из условия обеспечения заданного закона движения выбрать передаточное число редуктора. По номинальной мощности и типу двигателя дать рекомендации по выбору схемы управления. 79 Определить намагничивающую силу, необходимую для обеспечения требуемого усилия. Выбрать конструкцию и размеры катушек электромагнита. Привести эскиз катушки. 7. Рассчитать и построить графики зависимостей тягового усилия  Рис. 7.4 Данные для расчета приведены в таблицах 7.1-7.6 78 Силовые электрические микромашины - это в основном микродвигатели, работающие от сети трехфазного и однофазного переменного тока или от сети постоянного тока. Двигатели постоянного тока обладают хорошими регулировочными свойствами и высоким быстродействием, поэтому они успешно применяются в ИМ любой мощности с широким диапазоном регулирования скорости. Трехфазные асинхронные двигатели трудно поддаются плавному регулированию скорости. Поэтому они применялись в основном в ИМ с нерегулируемой или мало регулируемой скоростью. Однако в настоящее время в связи с появлением высокоэффективных полупроводниковых преобразователей частоты трехфазные асинхронные двигатели все шире применяются в ИМ с регулируемой скоростью, причем и в диапазонах малой и средней мощности. Асинхронные микродвигатели с двухфазной обмоткой статора, питающиеся от однофазной сети, используются в качестве исполнительных элементов в механизмах микромощности как с нерегулируемой, так и с плавно регулируемой скоростью. Синхронные шаговые двигатели применяются в позиционных и следящих ИМ, работающих в дискретном (шаговом) режиме. Шаговые двигатели наилучшим образом приспособлены для управления с помощью средств вычислительной техники. К информационным микромашинам относятся измерители угла (поворотные трансформаторы, сельсины) и измерители угловой скорости (та-хогенераторы). Эти микромашины широко используются в качестве измерительно-преобразовательных устройств в ИМ с обратными связями по положению и скорости. Основные требования, предъявляемые к электрическим микромашинам, разделяются на две группы: Общие требования, не связанные с конкретными условиями эксплуатации и областью применения. Основные требования к информационным микромашинам - высокая точность преобразования и стабильность характеристик. Силовые микромашины наряду с достаточной точностью и быстродействием должны иметь хорошие энергетические показатели. Практически ко всем микромашинам предъявляется требование высокой надежности, т.е. способности безотказно работать в течение заданного времени и при определенных условиях эксплуатации. Требования, предъявляемые в зависимости от области применения и условий эксплуатации: минимальные габаритные размеры и масса при |