|
|
Методичка. Методические указания по изучению разделов и тем курса Исполнительные механизмы систем управления
69
С учетом 1-го закона Кирхгофа для узла 2 получим:
Объединяя полученные уравнения в систему (6.3) и решая ее относительно неизвестных Ф1 ,Ф2, Ф3, получим:
 (6.3) (6.3)
Исходным этапом расчета электромагнита является составление схемы замещения его магнитной системы. Вначале по эскизу магнитной системы (рис. 6.5) определяются ожидаемые пути прохождения магнитных потоков, выделяются участки магнитопровода, рабочих воздушных зазоров, участки прохождения потоков рассеяния и участки источников намагничивающей силы (обмотки электромагнита). Разбивка магнитной системы на участки производится с учетом простоты последующего расчета параметров замещающих элементов магнитной цепи.
Порядок расчета электромагнита постоянного тока
Последовательность расчета следующая:
На основе эскиза магнитной системы произвести ее разбиение на характерные участки и составить схему замещения магнитной системы, заменив выделенные участки соответствующими элементами магнитной цепи.
Пользуясь расчетными соотношениями, произвести идентификацию эквивалентных параметров элементов магнитной цепи и соответствующих участков магнитной системы.
Считая намагничивающую силу Fисточника поля известной и неизменной, по эквивалентной схеме произвести расчет величин магнитных
68
3 ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ НА БАЗЕ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА
3.1 Конструкция, принцип работы и характеристики исполнительных двигателей постоянного тока
На рисунке 3.1 приведены основные типы двигателей постоянного тока. Наибольшее распространение имеют коллекторные двигатели постоянного тока.
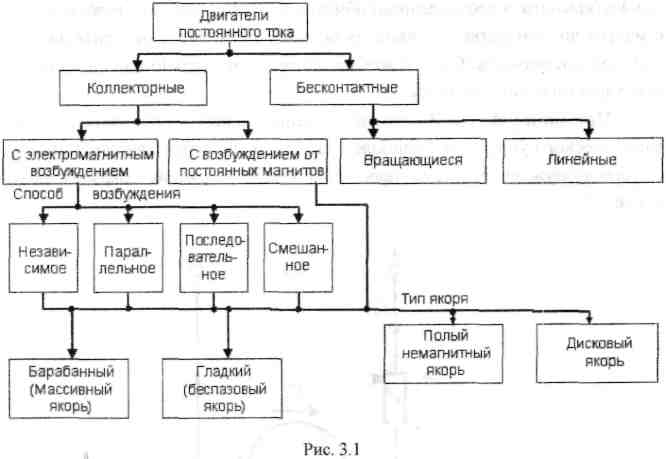
Конструкция коллекторных машин. Коллекторная машина постоянного тока характеризуется тем, что в обмотке якоря наводится переменная ЭДС, частота которой пропорциональна угловой скорости ротора, а между обмоткой якоря и внешней цепью постоянного тока включается механический преобразователь частоты - коллектор со щетками. В результате во внешней цепи машины ток протекает постоянный, а по каждому проводнику обмотки якоря - переменный, частота изменения которого определяется угловой скоростью ротора.
Коллекторные машины постоянного тока выпускаются в основном с барабанным (массивным) ротором, отдельные серии машин микро- и малой
25
мощности выпускаются с полым немагнитным (серия ДПР) и дисковым (серия ПЯ) роторами. Коллекторные машины могут быть с электромагнитным возбуждением и с возбуждением от постоянных магнитов.
Под способом возбуждения машины понимается схема соединения обмоток возбуждения главных полюсов статора и якоря. Соответственно различают машины независимого, параллельного, последовательного и смешанного (при наличии на полюсах нескольких обмоток) возбуждения. Конструктивно эти машины отличаются только параметрами обмоток главных полюсов: обмотки независимого и параллельного возбуждения выполняют с большим числом витков из провода малого сечения и относительно большим сопротивлением; обмотки последовательного возбуждения -с малым числом витков из провода большого сечения и относительно малым сопротивлением. Способ возбуждения весьма сильно влияет на основные характеристики машины.
26
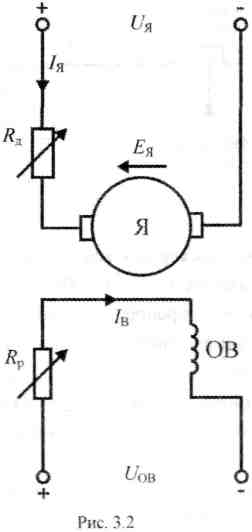
Принцип работы. В качестве исполнительных двигателей систем автоматического управления наиболее часто используются двигатели независимого возбуждения. Схема включения такого двигателя показана на рисунке 3.2.
Закон Ома для магнитной цепи:
Первый закон Кирхгофа для магнитной цепи: , т.е. алгебраи-
ческая сумма магнитных потоков в узле равна нулю.
Магнитные потоки, втекающие в узел, считаются положительными, а вытекающие из узла - отрицательными.
Для узла (рис. 6.3)
Второй закон Кирхгофа для магнитной цепи: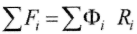 , т.е. ал- , т.е. ал-
гебраическая сумма намагничивающих сил источников магнитного поля в замкнутом контуре равна алгебраической сумме произведений магнитных потоков и сопротивлений каждого из участков этого контура. Для замкнутого контура 1—2-3—4 магнитной цепи (рис. 6.4) при обходе контура по стрелке справедливо равенство:
Для контура 1-2-5-6-3-4

67
6.5 Теоремы подобия магнитных систем
1. Одинаково намагниченные геометрически подобные магнитные
системы имеют магнитные поля одинаковой конфигурации.
2. При увеличении в п раз всех размеров магнитной системы в со
ответственных точках напряженности полей и индукции остаются без из
менения, а магнитный поток возрастает в и" раз.
При увеличении в п раз всех размеров электромагнита напряженности полей и индукции остаются без изменения, а магнитный поток возрастает в п раз, если токи увеличиваются также в п раз. При этом плотность токов уменьшается в п раз, выделение тепла возрастает в п раз, теплоотдача возрастает в n2раз и условия охлаждения улучшаются в п раз. Число витков считается неизменным.
Если при увеличении всех размеров электромагнита в п раз условия охлаждения и число витков обмотки должны оставаться неизменными,
то токи необходимо увеличивать в раз. При этом напряженности полей
и индукция возрастают в раз (при отсутствии насыщения), а потреб-ляемая мощность - в п раз.
Теоремы подобия позволяют легко рассчитывать варианты данной магнитной системы, отличающиеся от нее лишь масштабом. При этом все параметры исходной магнитной системы считаются известными.
6.6 Методика расчета электромагнитов постоянного тока
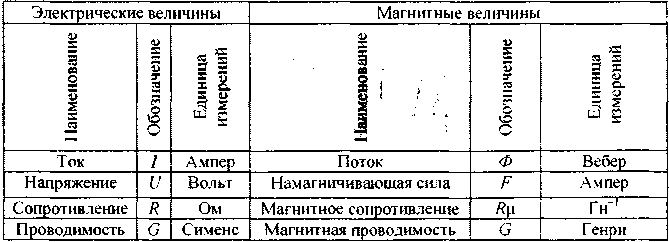
В основу методики расчета положены методы теории цепей и законы Ома и Кирхгофа для магнитных цепей. В таблице 6.2 приведены основные величины - аналоги, используемые в расчетах электрических и магнитных цепей.
66
Таблица 6.2
В цепь якоря может быть включено добавочное сопротивление Rд, например, пусковой реостат. Для регулирования тока возбуждения в цепь обмотки возбуждения ОВ может быть включен регулировочный реостат Rр.
Принцип работы двигателя постоянного тока основан на электромагнитном взаимодействии неподвижного магнитного потока возбуждения Ф с током lя, протекающим по обмотке якоря. На каждый из проводников с током действует электромагнитная сила и создается результирующий электромагнитный момент
 (3.1) (3.1)
где k- конструктивный коэффициент, зависящий от конструктивных
параметров машины. Этот момент заставляет ротор вращаться, направления момента и скорости совпадают.
При вращении проводников якоря в поле возбуждения: в каждом из них наводится ЭДС вращения и с щеток снимается результирующая ЭДС обмотки якоря:
 (3.2) (3.2)
где со - угловая скорость якоря. В режиме двигателя эта ЭДС направлена навстречу току якоря.
Механические характеристики. Механическая характеристика двигателя - это зависимость электромагнитного момента, развиваемого двигателем, от угловой скорости ротора. Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной.
Уравнение механической характеристики может быть
найдено из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя (рис. 3.3), записанного на основании второго закона. Кирхгофа:
(3 .3)
где Rя- активное сопротивление якоря.
Преобразуя (3.3) с учетом (3.1) и (3.2), получим уравнение механической характеристики
 (3.4) (3.4)
27
Это уравнение можно представить в виде где wо.ид — угловая частота идеального холостого хода (при ) где wо.ид — угловая частота идеального холостого хода (при )
 - уменьшение угловой частоты, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи. - уменьшение угловой частоты, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи.
Семейство механических характеристик при номинальном напряжении на якоре и потоке возбуждения и различных добавочных сопротивлениях в цепи якоря изображено на рис. 3.3.
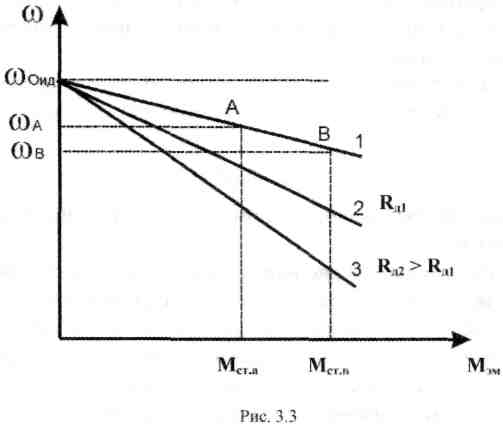
Механические характеристики двигателей принято оценивать по трем показателям: устойчивость, жесткость и линейность.
Естественная механическая характеристика, соответствующая (3.4) при Rд = 0, изображена прямой линией 1. Механическая характеристика линейная; небольшое отклонение от линейного закона может быть вызвано потоком якоря, создаваемым током якоря и приводящим к изменению результирующего потока Ф. Эта характеристика жесткая, т.к. при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 - искусственные реостатные характеристики). Характеристики устойчивые, т.е. двигатель автома-
28
65
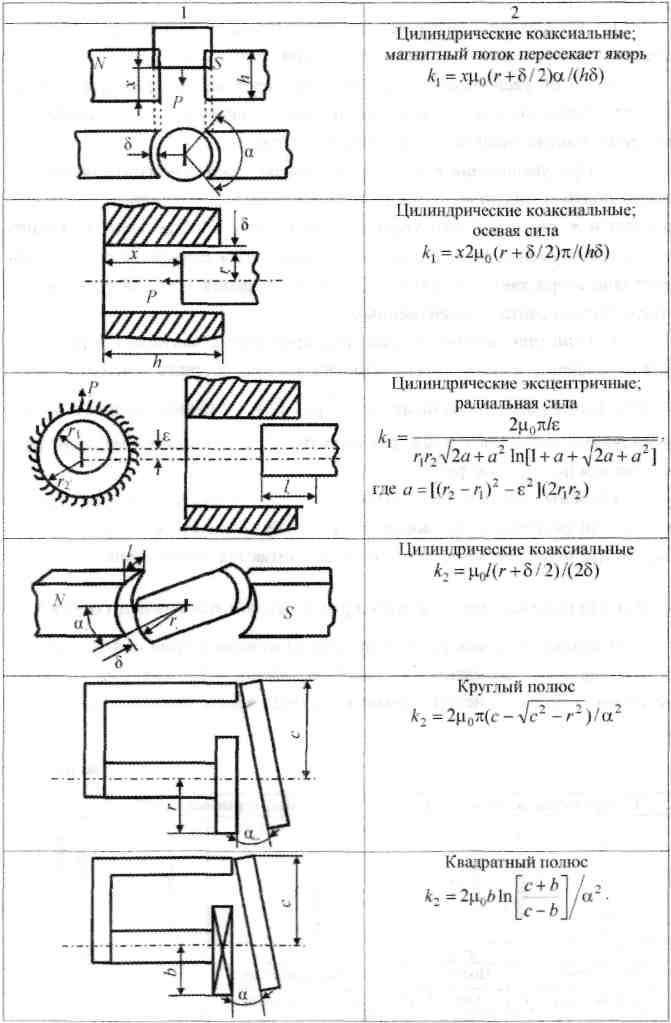
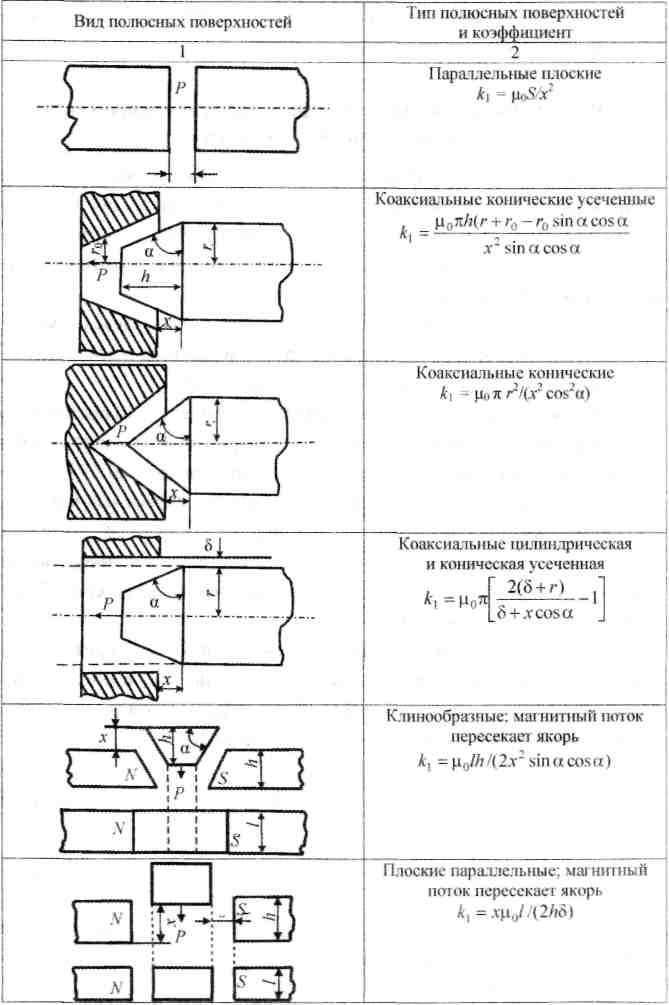
Окончание табл. 6.1
64
Таблица 6.1 Коэффициенты формул тягового усилия и вращающего момента
тически возвращается в исходную точку характеристики после снятия возмущения. Формальным признаком устойчивости является знак производной на устойчивом участке характеристики производная должна быть отрицательной.
Увеличение статического момента сопротивления на валу двигателя приводит к уменьшению угловой частоты и ЭДС якоря. Ток якоря, выражение для которого можно записать на основании (3.3)
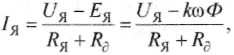 (3.6) (3.6)
возрастает. Соответственно растет электромагнитный момент
Регулирование скорости. Угловую скорость двигателя при неизменном моменте сопротивления можно регулировать (см. (3.4)) тремя способами:
якорным - изменением напряжения на обмотке якоря Uя;
полюсным - изменением магнитного потока возбуждения Ф;
реостатным - изменением добавочного сопротивления Rдв цепи якоря.
Регулировочные характеристики двигателей независимого возбуждения при якорном управлении будут рассмотрены в следующих разделах. При этом возможны два основных вида управления:
непрерывное - изменением во времени амплитуды напряжения;
импульсное - изменением времени, в течение которого к двигателю подводится номинальное напряжение.
Полюсное управление применяется гораздо реже якорного, т.к. регулировочные характеристики получаются нелинейными и цепь управления обладает значительной индуктивностью, что может отрицательно сказаться на быстродействии. Преимуществом полюсного управления является значительно меньший ток возбуждения по сравнению с током якоря и, соответственно, меньшая мощность управления.
При реостатном способе через реостаты Rд(см. рис. 3.2) должен длительно пропускаться значительный ток, что вызывает большие потери мощности. Способ не обеспечивает широкого диапазона регулирования скорости, он неэкономичен и в системах автоматического управления применяется крайне редко.
Пуск. Пуск двигателя постоянного тока осложняется тем, что при  ЭДС ЭДС и пусковой ток якоря и пусковой ток якоря может в 10-20 раз пре- может в 10-20 раз пре-
вышать номинальный ток, что опасно как для двигателя (усиление искре-
29
ния, динамические перегрузки), так и для источника питания. Поэтому важнейшими показателями пускового режима являются кратность пускового тока и кратность пускового момента и кратность пускового момента При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока. При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока.
Прямой пуск применяют обычно при кратности пускового тока
 . При большем значении . При большем значении  применяют способы пуска, обеспечивающие снижение тока либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. применяют способы пуска, обеспечивающие снижение тока либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря.
Реверсирование. Реверсирование двигателя осуществляется либо изменением полярности напряжения на обмотке якоря, либо на обмотке возбуждения. В обоих случаях изменяется знак момента двигателя и, и,
соответственно, направление вращения ротора.
|
|
|
 Скачать 1.73 Mb.
Скачать 1.73 Mb.