Методичка. Методические указания по изучению разделов и тем курса Исполнительные механизмы систем управления
 Скачать 1.73 Mb. Скачать 1.73 Mb.
|

|
Торможение. У двигателей независимого возбуждения возможны три тормозных режима: рекуперативное торможение - перевод двигателя в режим генератора, работающего параллельно с сетью, торможение противовключением - за счет изменения направления тока якоря или потока возбуждения, - динамическое - перевод двигателя в режим автономного генератора. У двигателей исполнительных устройств применяется в основном торможение противовключением или динамическое. Бесконтактные двигатели постоянного тока. Коллекторные двигатели постоянного тока обладают хорошими регулировочными свойствами и экономичны, но наличие скользящего контакта коллектор-щетки ограничивает область их применения. В настоящее время в связи с развитием силовой полупроводниковой электроники появились и начали получать все более широкое распространение бесконтактные двигатели постоянного тока. При замене механического коммутатора - коллектора с щетками-полупроводниковым коммутатором двигатель постоянного тока становится более надежным и долговечным, создает меньше радиопомех, особенно при высоких частотах вращения, когда очень быстро изнашиваются щетки и значительно увеличиваются искрение и радиопомехи. Конструтция. В отличие от обычного коллекторного двигателя, бесконтактный двигатель постоянного тока обладает рядом характерных особенностей. 30 управляющей обмотки. При выключенной обмотке поток постоянного магнита замыкается в основном через якорь. Включение тока увеличивает магнитное сопротивление цепи якоря, и поток постоянного магнита начинает замыкаться через шунт. 6.4 Расчетные формулы для определения тягового усилия и вращающего момента Тяговое усилие Р и вращающий момент М как нейтрального, так и поляризованного электромагнита нужно рассчитывать по общим энергетическим формулам: Электромагнит - довольно сложная система с распределенными параметрами, у которой из-за сложности формул теории поля обычно не удается получить выражения вида Поэтому здесь, так же как и при расчете тяговых усилий постоянного магнита, расчет системы с распределенными параметрами обычно заменяют расчетом магнитной цепи с сосредоточенными параметрами. Для определения тяговых усилий и моментов, создаваемых намагничивающей силой, принимают У нейтральных электромагнитов перемещение якоря в пределах его рабочего хода мало отражается на величине энергии поля рассеяния. Поэтому, считая Коэффициенты k1и k2зависят от конструкции якоря и формы поля в рабочем зазоре. Их значения приведены в таблице 6.1, где обозначено: х -ход якоря, а - угол поворота якоря, рад. 63 мотке пружина отводит якорь от магнитопровода, и поток постоянного магнита замыкается через шунт. При включении обмотки в ней возникает намагничивающая сила, под воздействием которой поток постоянного магнита становится в шунте равным нулю и начинает замыкаться через якорь, вызывая его притяжение. 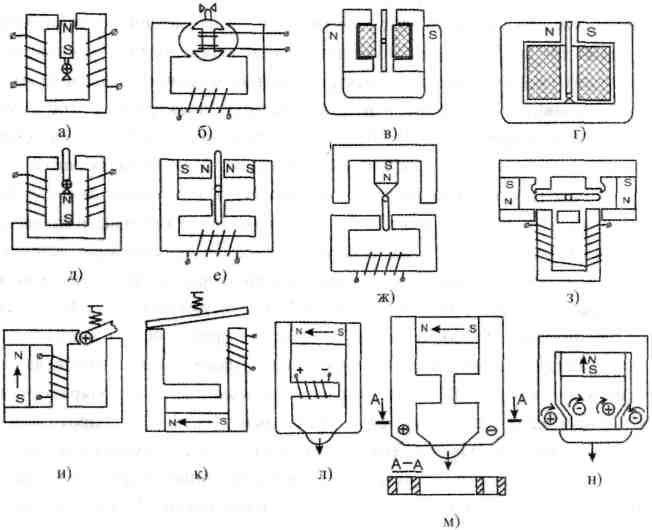 Рис. 6.2 Конструктивные схемы поляризованных электромагнитов Удерживающие электромагниты предназначены для работы в автоматических устройствах, требующих практически мгновенного отпускания в строго определенный момент времени. Принцип действия удерживающего электромагнита (рис. 6.2,л) с последовательным соединением магнитных полей также основан на перераспределении потока постоянного магнита между якорем и шунтом, но, в отличие от притягивающих электромагнитов, при включении тока намагничивающая сила обмотки уменьшает до нуля поток не в шунте, а в якоре. Принцип действия одинарного (рис. 6.2,м) и сдвоенного (рис. 6.2,н) удерживающих электромагнитов основан на явлении насыщения участков магнитопровода вблизи круглых отверстий, сквозь которые проходят витки 62 Силовая обмотка якоря расположена на статоре и состоит из нескольких катушек, сдвинутых относительно друг друга в пространстве. Ротор выполняют в виде постоянного магнита. Положение оси магнитного потока ротора по отношению к осям катушек силовой обмотки статора определяется бесконтактными датчиками (трансформаторными, индукционными, магнито-электрическими, фотоэлектрическими). Бесконтактный полупроводниковый коммутатор осуществляет коммутацию катушек силовой обмотки статора по сигналам датчиков положения. При мощности двигателей до 0,5-1 кВт в качестве коммутирующих элементов обычно используются транзисторы, при большей мощности-тиристоры. Эти факторы позволяют при устранении скользящего контакта коллектор-щетки сохранить основную особенность машины постоянного тока, заключающуюся в том, что частота переключения катушек обмотки якоря определяется частотой вращения ротора. Благодаря этому бесконтактный двигатель постоянного тока в основном сохраняет характеристики коллекторного двигателя с независимым возбуждением. Энергетическая диаграмма двигателя постоянного тока Преобразование электрической энергии в механическую наглядно показано с помощью энергетической диаграммы (рис. 3.4), где 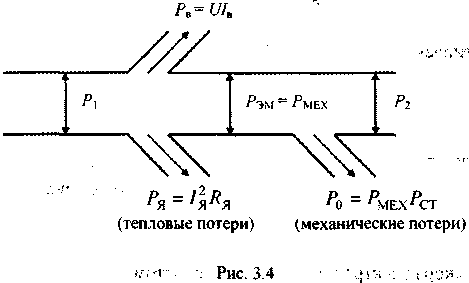 3.2 Методика расчета характеристик электродвигателя постоянного тока параллельного возбуждения Исходными данными для расчета являются характеристики электродвигателя постоянного тока параллельного возбуждения, приведенные в таблице 3.1. Таблица 3.1 В таблице 3.1 -напряжение; - полезная мощность; -номинальная скорость вращения; Требуется: определить ток холостого хода, сопротивления обмоток якоря и возбуждения, номинальный момент на валу электродвигателя, скорость вращения якоря двигателя при холостом ходе, КПД двигателя. Из рассмотрения энергетической диаграммы работы двигателя постоянного тока следует уравнение баланса мощностей: где Полагая Сопротивление обмотки якоря находим из выражения Сопротивление обмотки возбуждения: Ток якоря при холостом ходе определяем, полагая В этом случае уравнение баланса мощностей имеет вид где 32 6.3 Конструкции поляризованных электромагнитов Поляризованные электромагниты (рис. 6.2) в конструктивном отношении гораздо сложнее нейтральных, но отличаются высоким быстродействием. Поэтому их широко применяют в устройствах автоматики. Быстродействие поляризованных электромагнитов объясняется тем, что благодаря наличию постоянного магнита исключается время на накопление энергии, необходимой для срабатывания. По величине хода якоря поляризованные электромагниты принято делить на электромагниты с малым и большим ходом. Основные особенности поляризованных электромагнитов с малым ходом якоря (рис. 6.2). Это - быстродействие и возможность реверсировать движение якоря переменой знака (или фазы) управляющего сигнала. Системы с подвижным магнитом (рис. 6.2,а) и с подвижным электромагнитом (рис. 6.2,6) развивают большой вращающий момент и применяются в следящих устройствах. В первом случае реверс осуществляется переменой знака, а во втором - изменением фазы управляющего тока. Системы с расщепленным полюсом (рис. 6.2.в), с наружным (рис. 6.2,г) или внутренним (рис. 6.2,д) магнитом отличаются простотой и технологичностью конструкции, но в них нет разделения поляризующего и управляющего магнитных полей. В системе с расщепленным полюсом поляризующий поток насыщает магнитопровод и увеличивает магнитное сопротивление пути замыкания управляющего потока. В системе с наружным магнитом поток управляющей обмотки встречает большое сопротивление, т.к. может замыкаться лишь по воздуху и через постоянный магнит. В системе с внутренним магнитом плохо используется поляризующий поток якоря. Системы с частично (рис. 6.2,е) и полностью (рис. 6.2,ж,з) разделенными полями сложнее, чем системы с неразделенными полями, но развивают большой вращающий момент. Наибольшим вращающим моментом обладает система (рис. 6.2,з) с поперечным поляризующим потоком. Для получения линейной тяговой характеристики здесь применяют «когти» (выступы полюсных наконечников), по которым основная часть поляризующего потока переходит в торцы якоря. Поляризованные электромагниты с большим ходом якоря (рис. 6.2). Такие электромагниты делят на притягивающие и удерживающие. Принцип действия притягивающих электромагнитов с параллельным (рис. 6.2.и) и последовательным (рис. 6.2,к) соединениями магнитных полей основан на перераспределении потока постоянного магнита между якорем и шунтирующей якорь частью магнитопровода. При включенной об- 61 ными из пластин для уменьшения потерь от вихревых токов. Пластинчатый магнитопровод обеспечивает наибольшую скорость срабатывания и одинаково применим для возбуждения как постоянным, так и переменным током. Электромагниты с поворотными торцовым (рис. 6.1,в) и боковым (рис. 6.1,г) якорями применяют в нейтральных реле. Вариант с торцовым якорем лучше в конструктивном отношении (якорь имеет меньшую массу, призменная опора обеспечивает малое трение). Вариант с боковым якорем лучше в технологическом отношении (малое число деталей, изготовление магнитопровода штамповкой) и дешевле. Втяжные электромагниты П-образного (рис. 6.1,д) и горшечного (рис. 6.1,е) типов применяют в малогабаритных виброустойчивых реле и в автоматических приборных устройствах. П-образный магнит проще в технологическом отношении, но хуже использует активные материалы и развивает меньшее тяговое усилие, чем одинаковый по весу электромагнит горшечного типа. Быстродействующие электромагниты горшечного типа имеют высокий сердечник и короткий пустотелый якорь. Втяжные тарелочные электромагниты (рис. 6.1,ж) применяют в реверсивных муфтах следящих систем. Втяжной Ш-образный электромагнит (рис. 6.1,з) применяют в автоматических приборных устройствах, работающих от сети переменного тока. П-образная конструкция (рис. 6.1,и) рассчитана на питание только от сети переменного тока. Для устранения вибраций якоря (возникающих дважды за период из-за уменьшения до нуля силы притяжения) применяют короткозамкнутые экраны в форме колец из красной меди, охватывающих часть полюсной поверхности. Сила притяжения якоря двухфазного (рис. 6.1,к) и трехфазного (рис. 6.1,л) электромагнитов остается постоянной, но точка ее приложения циклически перемещается вдоль якоря, что вызывает его вибрацию. Вибрация отсутствует полностью лишь у двухфазного сдвоенного электромагнита (рис. 6.1,м) при расположении обмоток одной фазы на крайних стержнях, а другой фазы -на средних. Втяжные электромагниты (рис. 6.1,н,о) имеют значительно больший рабочий ход, чем электромагниты с плоским якорем, но в конструктивном отношении они значительно сложнее. Поворотный функциональный магнит (рис. 6.1,п) применяют в качестве электрической пружины, характеристика которой определяется профилем ротора; дифференциальный магнит (рис. 6.1,р) - в системах управления для сравнения двух или нескольких сигналов. 60 После преобразований получим Решением последнего уравнения относительно неизвестного Iяxxявляются два корня: Выбираем наименьшее значение Скорость вращения двигателя при холостом ходе определяется с использованием конструктивного коэффициента двигателя с. Известно, что ЭДС обмотки якоря определяется скоростью вращения якоря , магнитным потоком Ф и конструктивным коэффициентом с [6]: где -число проводников обмотки якоря. Преобразуя (3.3) с учетом Определив , можно найти скорость вращения якоря электродвигателя при холостом ходе: Коэффициент полезного действия двигателя определяют отношением Направление тока и ЭДС в проводниках обмотки якоря двигателя можно определить из рассмотренной схемы двигателя (рис. 3.5). |