|
|
Методические указания СПЕЦ. ЧАСТЬ. Методические указания по подготовке к экзамену на повышение квалификации Электромеханик по средствам автоматики и приборам технологического оборудования
1.15 Топология сетей
Топологии сетей
Сетевая топология (от греч. τόπος, - место) — способ описания конфигурации сети, схема расположения и соединения сетевых устройств.
Топология – это схема соединения каналами связи компьютеров или узлов сети между собой.
Сетевая топология может быть
физической — описывает реальное расположение и связи между узлами сети.
логической— описывает хождение сигнала в рамках физической топологии.
информационной — описывает направление потоков информации, передаваемых по сети.
управления обменом — это принцип передачи права на пользование сетью.
Существует множество способов соединения сетевых устройств. Выделяют следующие топологии:
полносвязная
ячеистая
общая шина
звезда
кольцо
снежинка
Рассмотрим каждую из них по подробнее.
1) Полносвязная топология — топология компьютерной сети, в которой каждая рабочая станция подключена ко всем остальным. Этот вариант является громоздким и неэффективным, несмотря на свою логическую простоту. Для каждой пары должна быть выделена независимая линия, каждый компьютер должен иметь столько коммуникационных портов сколько компьютеров в сети. По этим причинам сеть

может иметь только сравнительно небольшие конечные размеры. Чаще всего эта топология используется в многомашинных комплексах или глобальных сетях при малом количестве рабочих станций.
Технология доступа в сетях этой топологии реализуется методом передачи маркера. Маркер – это пакет, снабженный специальной последовательностью бит (его можно сравнить с конвертом для письма). Он последовательно предается по кольцу от компьютера к компьютеру в одном направлении. Каждый узел ретранслирует передаваемый маркер. Компьютер может передать свои данные, если он получил пустой маркер. Маркер с пакетом передается, пока не обнаружится компьютер, которому предназначен пакет. В этом компьютере данные принимаются, но маркер движется дальше и возвращается к отправителю.
После того, как отправивший пакет компьютер убедится, что пакет доставлен адресату, маркер освобождается.
Недостаток: громоздкий и неэффективный вариант, т.к. каждый компьютер должен иметь большое кол-во коммуникационных портов.
2) Ячеистая топология - базовая полносвязная топология компьютерной сети, в которой каждая рабочая станция сети соединяется с несколькими другими рабочими станциями этой же сети. Характеризуется высокой отказоустойчивостью, сложностью настройки и переизбыточным расходом кабеля. Каждый компьютер имеет множество возможных путей соединения с другими компьютерами. Обрыв кабеля не приведёт к потере соединения между двумя компьютерами.

Получается из полносвязной путем удаления некоторых возможных связей. Эта топология допускает соединение большого количества компьютеров и характерна, как правило, для крупных сетей.
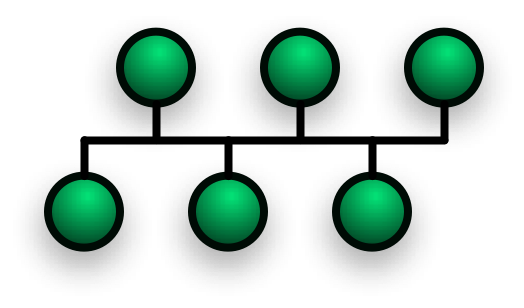
3) Общая шина, представляет собой общий кабель (называемый шина или магистраль), к которому подсоединены все рабочие станции. На концах кабеля находятся терминаторы, для предотвращения отражения сигнала.
Сравнение с другими топологиями.
Достоинства:
Небольшое время установки сети;
Дешевизна (требуется меньше кабеля и сетевых устройств);
Простота настройки;
Выход из строя рабочей станции не отражается на работе сети.
Недостатки:
Неполадки в сети, такие как обрыв кабеля и выход из строя терминатора, полностью блокируют работу всей сети;
Сложная локализация неисправностей;
С добавлением новых рабочих станций падает производительность сети.
Шинная топология представляет собой топологию, в которой все устройства локальной сети подключаются к линейной сетевой среде передачи данных. Такую линейную среду часто называют каналом, шиной или трассой. Каждое устройство, например, рабочая станция или сервер, независимо подключается к общему шинному кабелю с помощью специального разъема. Шинный кабель должен иметь на конце согласующий резистор, или терминатор, который поглощает электрический сигнал, не давая ему отражаться и двигаться в обратном направлении по шине.
4) Звезда - базовая топология компьютерной сети, в которой все компьютеры сети присоединены к центральному узлу (обычно коммутатор), образуя физический сегмент сети. Подобный сегмент сети может функционировать как отдельно, так и в составе сложной сетевой топологии (как правило, «дерево»). Весь обмен информацией идет исключительно через центральный компьютер, на который таким способом возлагается очень большая нагрузка, поэтому ничем другим, кроме сети, он заниматься не может. Как правило, именно центральный компьютер является самым мощным, и именно на него возлагаются все функции по управлению обменом. Никакие конфликты в сети с топологией звезда в принципе невозможны, потому что управление полностью централизовано.

Метод доступа реализуется с помощью технологии Arcnet. Этот метод доступа также использует маркер для передачи данных. Маркер передается от компьютера к компьютеру в порядке возрастания адреса. Как и в кольцевой топологии, каждый компьютер регенерирует маркер.
Сравнение с другими топологиями.
Достоинства:
выход из строя одной рабочей станции не отражается на работе всей сети в целом;
хорошая масштабируемость сети;
лёгкий поиск неисправностей и обрывов в сети;
высокая производительность сети (при условии правильного проектирования);
гибкие возможности администрирования.
Недостатки:
выход из строя центрального концентратора обернётся неработоспособностью сети (или сегмента сети) в целом;
для прокладки сети зачастую требуется больше кабеля, чем для большинства других топологий;
конечное число рабочих станций в сети (или сегменте сети) ограничено количеством портов в центральном концентраторе.
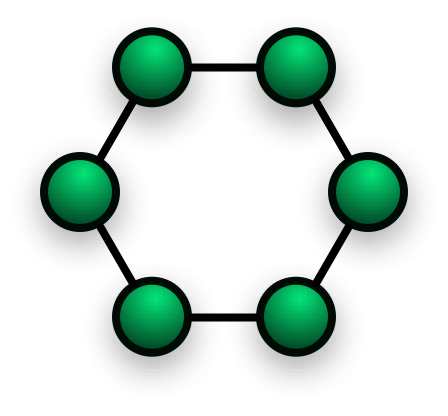
5) Кольцо - это топология, в которой каждый компьютер соединен линиями связи только с двумя другими: от одного он только получает информацию, а другому только передает. На каждой линии связи, как и в случае звезды, работает только один передатчик и один приемник. Это позволяет отказаться от применения внешних терминаторов.
Работа в сети кольца заключается в том, что каждый компьютер ретранслирует (возобновляет) сигнал, то есть выступает в роли повторителя, потому затухание сигнала во всем кольце не имеет никакого значения, важно только затухание между соседними компьютерами кольца. Четко выделенного центра в этом случае нет, все компьютеры могут быть одинаковыми. Однако достаточно часто в кольце выделяется специальный абонент, который управляет обменом или контролирует обмен. Понятно, что наличие такого управляющего абонента снижает надежность сети, потому что выход его из строя сразу же парализует весь обмен.
Компьютеры в кольце не являются полностью равноправными (в отличие, например, от шинной топологии). Одни из них обязательно получают информацию от компьютера, который ведет передачу в этот момент, раньше, а другие — позже. Именно на этой особенности топологии и строятся методы управления обменом по сети, специально рассчитанные на «кольцо». В этих методах право на следующую передачу (или, как еще говорят, на захват сети) переходит последовательно к следующему по кругу компьютеру.
Подключение новых абонентов в «кольцо» обычно совсем безболезненно, хотя и требует обязательной остановки работы всей сети на время подключения. Как и в случае топологии «шина», максимальное количество абонентов в кольце может быть достаточно большое (1000 и больше). Кольцевая топология обычно является самой стойкой к перегрузкам, она обеспечивает уверенную работу с самыми большими потоками переданной по сети информации, потому что в ней, как правило, нет конфликтов (в отличие от шины), а также отсутствует центральный абонент (в отличие от звезды).
В кольце, в отличие от других топологий (звезда, шина), не используется конкурентный метод посылки данных, компьютер в сети получает данные от стоящего предыдущим в списке адресатов и перенаправляет их далее, если они адресованы не ему. Список адресатов генерируется компьютером, являющимся генератором маркера. Сетевой модуль генерирует маркерный сигнал (обычно порядка 2—10 байт во избежание затухания) и передает его следующей системе (иногда по возрастанию MAC-адреса). Следующая система, приняв сигнал, не анализирует его, а просто передает дальше. Это так называемый нулевой цикл.
Последующий алгоритм работы таков — пакет данных GRE, передаваемый отправителем адресату начинает следовать по пути, проложенному маркером. Пакет передаётся до тех пор, пока не доберётся до получателя.
Сравнение с другими топологиями.
Достоинства:
Простота установки;
Практически полное отсутствие дополнительного оборудования;
Возможность устойчивой работы без существенного падения скорости передачи данных при интенсивной загрузке сети, поскольку использование маркера исключает возможность возникновения коллизий.
Недостатки:
Выход из строя одной рабочей станции, и другие неполадки (обрыв кабеля), отражаются на работоспособности всей сети;
Сложность конфигурирования и настройки;
Сложность поиска неисправностей.
Необходимость иметь две сетевые платы, на каждой рабочей станции.
6) Снежинка (Иерархическая Звезда или древовидная топология) - топология типа звезды, но используется несколько концентратов, иерархически соединенных между собой связями типа звезда. Топология "снежинка" требует меньшей длины кабеля, чем "звезда", но больше элементов.
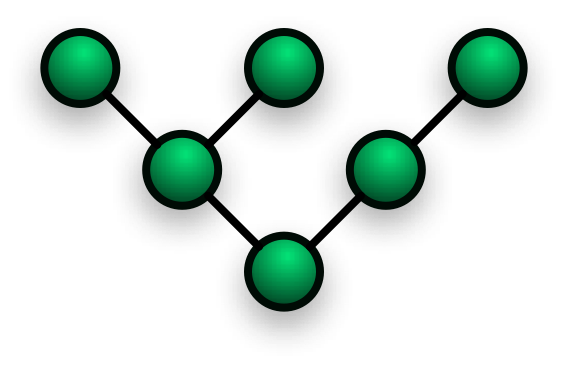
Самый распространенный способ связей как в локальных сетях, так и в глобальных.
1.16 Средства измерения в составе автоматизированной системы управления технологическим процессом
|
К средствам измерения и преобразования измерительной информации в АСУТП относятся измерительные преобразователи, расположенные на 1-м нижнем уровне системы. Первичные измерительные преобразователи позволяют системе получать информацию о состоянии технологического процесса, на основании которой впоследствии принимаются решения об управляющих воздействиях. Передающие измерительные преобразователи служат для преобразования измерительной информации в сигналы, удобные для обработки и передачи на расстояние.
Главной особенностью средств измерения, применяемых в АСУТП, является то, что первичный преобразователь конструктивно объединяется с передающим в измерительном преобразователе, называемом датчик. Все датчики на выходе вырабатывают электрические сигналы. Кроме того, в целях унификации последующих уровней системы по возможности применяют средства измерений, вырабатывающие стандартные выходные сигналы, или цифровые коды, удобные для дальнейшей передачи.
В современных АСУТП применяются два класса контроллеров: программируемые логические контроллеры и РС-совместимые контроллеры.
Программируемый логический контроллер (ПЛК). Это микропроцессорное устройство, предназначенное для управления технологическими процессами в промышленности и другими сложными технологическими объектами. Принцип работы контроллера заключается в сборе сигналов от датчиков и их обработке по прикладной программе пользователя с выдачей управляющих сигналов на исполнительные устройства.
Основными функциональными элементами контроллеров являются:
корпус;
источник питания;
процессорный модуль;
модули ввода-вывода (модули УСО);
модули связи и интерфейсов;
специализированные модули.
Источник питания должен обеспечивать непрерывность и надежность работы всех узлов контроллера. Особое внимание уделяется наличию резервного источника питания (как правило, аккумуляторная батарея), который позволяет сохранять информацию при отключении внешнего электропитания.
Модуль процессора в зависимости от используемой элементной базы может быть 8-, 16- и 32-разрядным. Объем оперативной памяти существенно различается в различных моделях контроллеров: от десятков килобайт до десятков мегабайт. По логическому построению модуль процессора контроллера аналогичен системному блоку персонального компьютера, где вместо дисковых накопителей в контроллерах используются перепрограммируемые запоминающие устройства и flash-память. В некоторых моделях контроллеров flash-память отсутствует, в других — может достигать десятков, а иногда и сотен мегабайт. В модуле процессора встроены также часы реального времени.
Модули ввода-вывода предназначены для преобразования входных аналоговых и дискретных сигналов в цифровую форму и выдачи управляющего воздействия в виде аналогового или дискретного сигнала. Модули аналогового ввода рассчитаны на ввод унифицированных сигналов тока (0...5 мА, 0(4)...20мА) и напряжения (0... 10 В, ±10 В). Имеются специализированные модули аналогового ввода, рассчитанные на непосредственное подключение различных датчиков (например, термопар или термосопротивлений). Модули аналогового вывода преобразуют цифровой сигнал в унифицированный сигнал тока или напряжения. Модули дискретного ввода-вывода чаще всего работают с низкоуровневыми дискретными сигналами (24 В постоянного тока). Некоторые модели контроллеров располагают модулями дискретного ввода высокоуровневых сигналов постоянного или переменного тока (до 250 В) и модулями дискретного вывода, организованных с использованием тиристоров, симисторов (до 250 В, 300...500 мА) и сильноточными реле (250 В, 2 А).
Модули связи и интерфейсов обеспечивают связь контроллеров с верхним уровнем, а также между собой. В практике построения АСУТП используются различные интерфейсы и протоколы передачи данных посредством сети. Как правило, это последовательные интерфейсы (RS-232, 422, 485, ИРПС) или сетевые протоколы (Еthernet, Profibus, САN, Мodbus и др.).
Все современные ПЛК обладают развитыми программными средствами. Несмотря на существование международного стандарта на языки программирования программируемых логических контроллеров 1ЕС 61131-3 многие производители снабжают свои контроллеры технологическими языками собственного производства
Технологические языки программирования позволяют проводить опрос входов и инициализацию выходов, обрабатывать арифметические и логические инструкции, управлять таймерами-счетчиками, осуществлять связь с другими ПЛК и компьютером.
Наиболее популярны в нашей стране ПЛК таких зарубежных производителей, как Аllen-Вгаdlеу, Siemens, АВВ, Modicon, Bailey, и такие отечественные модели, как «Ремиконт», «Микродат», «Эмикон».
РС-совместимые контроллеры. Это контроллеры, выполненные на базе компьютера.
Первое и главное преимущество РС-контроллеров связано с их открытостью, т. е. с возможностью применять в АСУТП самое современное оборудование, только-только появившееся на мировом рынке, причем оборудование для РС-контроллеров сейчас выпускают уже не десятки, а сотни производителей, что делает выбор достаточно широким. Это очень важно, если учесть, что модернизация АСУТП идет поэтапно и занимает длительное время, иногда несколько лет. Пользователь АСУТП уже не находится во власти одного производителя (как в случае с ПЛК), который навязывает ему свою волю и заставляет применять только его технические решения, а сам может сделать выбор, применяя те подходы, которые в данный момент его больше всего устраивают. Он может теперь применять в своих системах продукцию разных фирм, следя только, чтобы она соответствовала определенным международным или региональным стандартам. Второе важное преимущество РС-совместимых контроллеров заключается в том, что в силу их «родственности» с компьютерами верхнего уровня не требуются дополнительные затраты на подготовку профессионалов, обеспечивающих их эксплуатацию. Эту работу могут с успехом выполнять (и это подтверждается на практике) специалисты, обеспечивающие эксплуатацию компьютеров верхнего уровня. Это позволяет сократить сроки внедрения систем управления и упрощает процедуры их эксплуатации, что в конечном счете приводит к общему снижению затрат на создание или модернизацию АСУТП.
Контроллер на базе компьютера — РС-совместимый контроллер, кроме выполнения функций, характерных для ПЛК, — обладает большими возможностями. Так, например, на него можно возложить функции работы с сетями, интерфейса человек-машина, поддержку различных баз данных и более дружественного интерфейса пользователя. Таким образом, РС-контроллер можно считать РС-совместимой программируемой системой, которая выполняет строго определенную задачу, но с возможностью гибкого ее перепрограммирования. |
|
|
 Скачать 1.09 Mb.
Скачать 1.09 Mb.