№ 2 (2 курс 2 сессия) Динамика (заоч). Методические указания входят задания по основному разделу теоретической механики динамике
 Скачать 5.15 Mb. Скачать 5.15 Mb.
|

|
МЕТОДИЧЕСКИЕ УКАЗАНИЯ В настоящие методические указания входят задания по основному разделу теоретической механики - динамике. Дается перечень вопросов, которые, как основная часть курса, должны изучаться студентами всех специальностей. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА Раздел «Динамика» РАБОЧАЯ ПРОГРАММА Введение в динамику. Предмет динамики. Основные понятия и определения: масса, материальная точка, сила. Законы механики Галилея-Ньютона. Инерциальная система отсчета. Задачи динамики. Динамика точки. Дифференциальные уравнения движения свободной материальной точки в декартовых координатах. Две основные задачи динамики для материальной точки. Решение первой задачи динамики. Решение второй задачи динамики. Начальные условия. Постоянные интегрирования и их определение по начальным условиям. Примеры интегрирования дифференциальных уравнений движения точки в случаях силы, зависящей от времени, от положения точки и от ее скорости. Введение в динамику механической системы. Механическая система. Классификация сил, действующих на систему: силы активные (задаваемые) и реакции связей; силы внешние и внутренние. Свойства внутренних сил. Масса системы. Центр масс; радиус-вектор и координаты центра масс. Общие теоремы динамики. Дифференциальные уравнения движения механической системы. Теорема о движении центра масс механической системы. Закон сохранения движения центра масс. Количество движения материальной точки. Элементарный импульс силы. Импульс силы за конечный промежуток времени. Теорема об изменении количества движения точки в дифференциальной и в конечной формах. Количество движения механической системы; его выражение через массу системы и скорость ее центра масс. Теорема об изменении количества движения механической системы в конечной форме. Закон сохранения количества движения механической системы. Момент количества движения материальной точки относительно центра и относительно оси. Теорема об изменении момента количества движения точки. Главный момент количества движения или кинетический момент механической системы относительно центра и относительно оси. Кинетический момент вращающегося твердого тела относительно оси вращения. Теорема об изменении кинетического момента механической системы. Закон сохранения кинетического момента механической системы. Кинетическая энергия материальной точки. Элементарная работа силы; аналитическое выражение элементарной работы. Работа силы на конечном перемещении точки ее приложения. Работа силы тяжести, силы упругости и силы тяготения. Мощность. Теорема об изменении кинетической энергии точки. Кинетическая энергия механической системы. Кинетическая энергия твердого тела при поступательном движении, при вращении вокруг неподвижной оси и при плоскопараллельном движении тела. Теорема об изменении кинетической энергии механической системы. Равенство нулю суммы работ внутренних сил в твердом теле. Работа и мощность сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси. Принцип Даламбера. Сила инерции материальной точки. Принцип Даламбера для материальной точки и механической системы. СПИСОК ЛИТЕРАТУРЫ Воронков И.М. Курс теоретической механики. М., 1954 и последующие издания. Гернет М.М. Курс теоретической механики. М., 1970 и последующие издания. Тарг С.М. Краткий курс теоретической механики. М., 1963 и последующие издания. Мещерский И.В. Сборник задач по теоретической механике. М., 1970 и последующие издания. Сборник задач по теоретической механике. / Под ред. К.С.Колесникова. М., 1983. Сборник задач для курсовых работ по теоретической механике / Под ред. А.А. Яблонского. М., 1972 и последующие издания. (Содержит примеры решения задач.) Пирогов С.П. Краткий курс лекций по теоретической механике. Тюмень, «Вектор Бук», 2001 г. КОНТРОЛЬНОЕ ЗАДАНИЕ СОДЕРЖАНИЕ ЗАДАНИЙ, ВЫБОР ВАРИАНТОВ, ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТ, ОБЩИЕ ПОЯСНЕНИЯ К ТЕКСТУ ЗАДАЧ Контрольное задание состоит из четырех задач - Д1, Д2, Д3, Д4. К каждой задаче дается 10 рисунков и таблица (с тем же номером, что и задача), содержащая дополнительные к тексту задачи условия. Нумерация рисунков двойная, при этом номером рисунка является цифра, стоящая после точки. Например, рис. Д1.4- это рис. 4 к задаче Д1 и т.д. (в тексте задачи при повторных ссылках на рисунок пишется просто рис. 4). Номера условий от 0 до 9 проставлены в 1-м столбце (или в 1-й строке) таблицы. Студент во всех задачах выбирает номер рисунка по предпоследней цифре шифра, а номер условия в таблице - по последней; например, если шифр оканчивается числом 46, то берет рис. 4 и условия № 6 из таблицы. Каждое задание выполняется в отдельной тетради (ученической), страницы которой нумеруются. На обложке указываются : название дисциплины, номер работы, фамилия и инициалы студента, учебный шифр, факультет, специальность и адрес. На первой странице тетради записываются: номер работы, номера решаемых задач и год издания контрольных заданий. Методические указания по решению задач, входящих в контрольные задания, даются для каждой задачи после изложения ее текста под рубрикой “Указания”; затем дается пример решения аналогичной задачи. Цель примера - разъяснить ход решения, но не воспроизвести его полностью. Поэтому в ряде случаев промежуточные расчеты опускаются. Но при выполнении задания все преобразования и числовые расчеты должны быть обязательно последовательно проделаны с необходимыми пояснениями; в конце должны быть даны ответы. Задача Д1 Груз D массой m, получив в точке А начальную скорость v0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные, или один горизонтальный, а другой наклонный (рис. Д1.0 - Д1.9, табл. Д1). На участке АВ на груз кроме силы тяжести действуют постоянная сила Q (ее направление показано на рисунках).  В точке В груз, не изменяя своей скорости, переходит на участок ВС трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось х задана в таблице. В точке В груз, не изменяя своей скорости, переходит на участок ВС трубы, где на него кроме силы тяжести действует переменная сила F, проекция которой Fx на ось х задана в таблице.Считая груз материальной точкой и зная расстояние АВ = l или время t1 движения груза от точки А до точки В, найти закон движения груза на участке ВС, т.е. х = f(t), где х = ВD. Трением груза о трубу пренебречь. 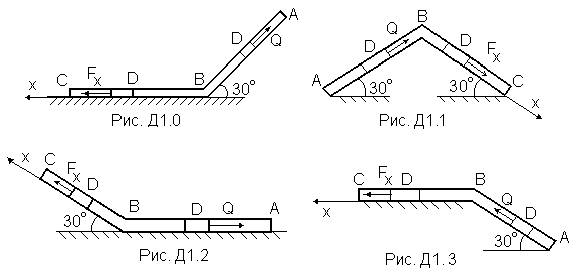 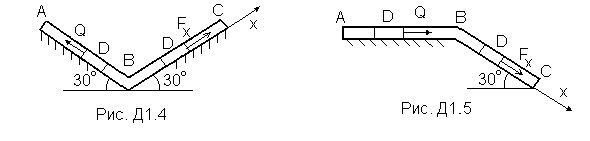 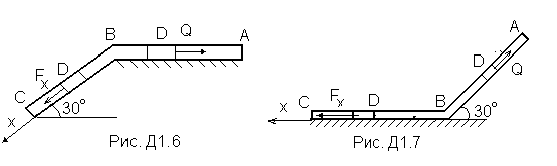 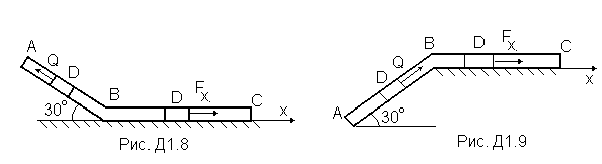 Указания. Задача Д1 - на интегрирование дифференциальных уравнений движения точки (решение основной задачи динамики). Решение задачи разбивается на две части. Сначала нужно составить и проинтегрировать методом разделения переменных дифференциальное уравнение точки (груза) на участке АВ, учтя начальные условия. Затем, зная время движения груза на участке АВ или длину этого участка, определить скорость груза в точке В. Эта скорость будет начальной для движения груза на участке ВС. После этого нужно составить и проинтегрировать дифференциальное уравнение движения груза на участке ВС тоже с учетом начальных условий, ведя отсчет времени от момента, когда груз находится в точке В, и полагая в этот момент t = 0. При интегрировании уравнения движения на участке АВ в случае, когда задана длина l участка, целесообразно перейти к переменному х, учтя, что На первом участке, где все силы постоянны, можно воспользоваться и теоремами об изменении количества движения или кинетической энергии точки. Таблица Д1
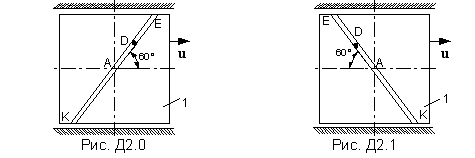
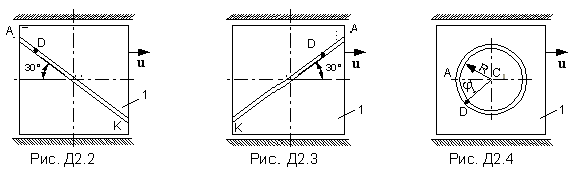
 Пример Д1. На вертикальном участке АВ трубы (рис. Д1) на груз D массой m действуют сила тяжести и постоянная сила Q; расстояние от точки А, где v = v0, до точки В равно l. На наклонном участке ВС на груз действуют сила тяжести и переменная сила F = F(t), заданная в ньютонах. Пример Д1. На вертикальном участке АВ трубы (рис. Д1) на груз D массой m действуют сила тяжести и постоянная сила Q; расстояние от точки А, где v = v0, до точки В равно l. На наклонном участке ВС на груз действуют сила тяжести и переменная сила F = F(t), заданная в ньютонах.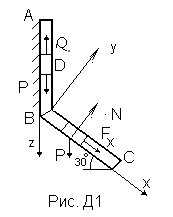 Дано: m = 2 кг, Q=4 Н Дано: m = 2 кг, Q=4 Н v0 = 5 м/с, l = 2.5 м, Fx = 16sin(4t). Определить: x= f(t) - закон движения груза на участке ВС. Решение. Рассмотрим движение груза на участке АВ, считая груз материальной точкой. Изображаем груз (в произвольном положении) и действующие на него силы P = mg и R. Проводим ось АZ и составляем дифференциальное уравнение движения груза в проекции на эту ось : Далее находим : PZ = P = mg, Учтя , что vz = v, получим Разделяя в уравнении (2) переменные, а затем беря от обеих частей интегралы, получим По начальным условиям при z = 0 v = v0, что дает С1 = В результате находим Полагая в равенстве (3) z = l = 2.5 м , определим скорость vB груза в точке В : Теперь рассмотрим движение груза на участке ВС; найденная скорость vB будет для движения на этом участке начальной скоростью (v0 = vB). Изображаем груз (в произвольном положении) и действующие на него силы P = mg , N и F. Проведем из точки В ось ВХ и составим дифференциальное уравнение движения груза в проекции на эту ось : Так как Рх = Psin30 = 0.5 mg , Nx = 0 , Fx = 16sin(4t) , то уравнение (4) примет вид Разделив обе части равенства на m = 2 кг и полагая опять g 10 м/с2 , получим Умножая обе части уравнения на dt и интегрируя, найдем vx = 5t - 2cos(4t) + C2 . Будем теперь отсчитывать время от момента, когда груз находится в точке В, считая в этот момент t = 0. Тогда при t = 0 vx = v0 = vB ., Подставляя эти величины в (11), получим С2 = vB + 2cos0 = 8,06 + 2 =10,06 Умножая здесь обе части на dt и снова интегрируя, найдем x = 2.5 t2 - 0.5sin(4t) + 10,06t + C3 Так как при t = 0 x = 0 , то С3 = 0 и окончательно искомый закон движения груза будет x = 2.5t2 + 10,06t - 0.5sin(4t) Задача Д2 Механическая система состоит из прямоугольной вертикальной плиты массой m1= 18 кг, движущейся вдоль горизонтальных направляющих, и груза D массой m2=6 кг (рис. Д2.0-Д2.9, табл. Д2). В момент времени t0 = 0, когда скорость плиты u0 = 2 м/с, груз под действием внутренних сил начинает двигаться по желобу плиты. На рис. 0-3 желоб KE прямолинейный и при движении груза расстояние S = AD изменяется по закону S = f1(t), а на рис. 4-9 желоб – окружность радиуса R = 0,8 м и при движении груза = AC1D изменяется по закону = f2(t). В табл. Д2 эти зависимости даны отдельно для рис. 0 и 1, для рис. 2и3 и т.д., где S выражено в метрах, - в радианах, t – в секундах. Считая груз материальной точкой и пренебрегая всеми сопротивлениями определить вертикальную реакцию направляющих и скорость плиты при t=1c. Таблица Д2
  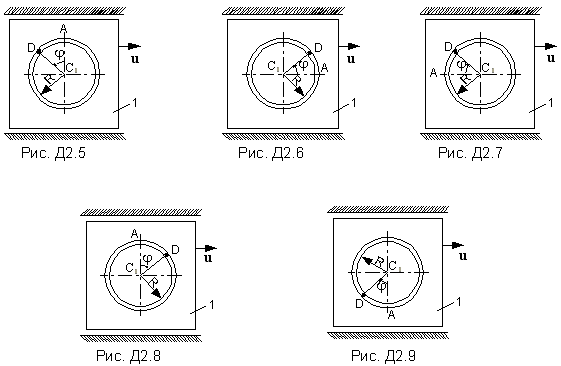 Указания. Задача Д2 – на применение теоремы о движении центра масс (для определения N = f(t)) и на применение теоремы об изменение количества движения системы (для определения u = f(t)). Пример Д2. Прямоугольная вертикальная плиты массой m1, движется вдоль горизонтальных направляющих (рис. Д2). В момент времени t0 = 0, когда скорость плиты u0 = 1 м/с, груз D массой m2 под действием внутренних сил начинает двигаться по желобу плиты окружности радиуса R = 1 м по закону = AC1D. Д а н о: m1= 15 кг, m2=5 кг, u0 = 1 м/с, R = 1 м, =t2/6 рад (t – в секундах). Определить вертикальную реакцию направляющих и скорость плиты при t=1c. 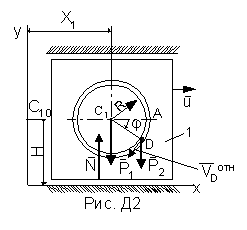 Решение. Рассмотрим механическую систему, состоящую из плиты и груза D в произвольном положении. Изобразим действующие на систему внешние силы: силы тяжести а) Определение реакции N. Для определения N = f(t) воспользуемся теоремой о движении центра масс системы. Составим дифференциальные уравнения движения центра масс системы в проекции на вертикальную ось у (рис. Д2): Отсюда получим, учтя, что P1=m1g: По формуле определяющей ординату yc центра масс системы, получим Продифференцировав обе части этого равенства по времени, найдем Подставив это значение в уравнение (2), получимПри t=1c, N=194 H. б) Определение скорости u. Чтобы определить u воспользуемся теоремой об изменении количества движения механической системы откуда Для рассматриваемой механической системыгде Для определения При t=0 так как относительная скорость точки D равна нулю. При t=1с Подставив (4) и (5) в (3) находим Задача Д3 Механическая система состоит из грузов 1 и 2 (коэффициент трения грузов о плоскость f=0,1) и ступенчатых шкивов 3 и 4 с радиусами ступеней R3=0,3 м, r3=0,1 м, R4=0,2 м, r4=0,1 м (массу каждого шкива считать равномерно распределенной по его внешнему ободу) (рис. Д3.0-Д3.9, табл. Д3). Тела системы соединены друг с другом нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям. Под действием постоянной силы F система приходит в движение из состояния покоя. При движении системы на шкивы 3 и 4 действуют постоянные моменты сил сопротивлений, равные соответственно М3 и М4. Определить значение искомой величины в тот момент времени, когда перемещение точки приложения силы Таблица Д3
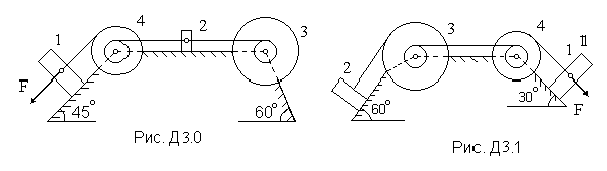 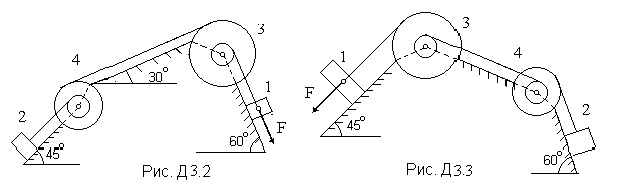 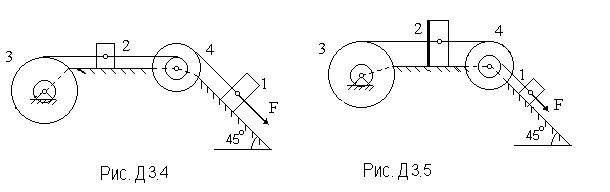 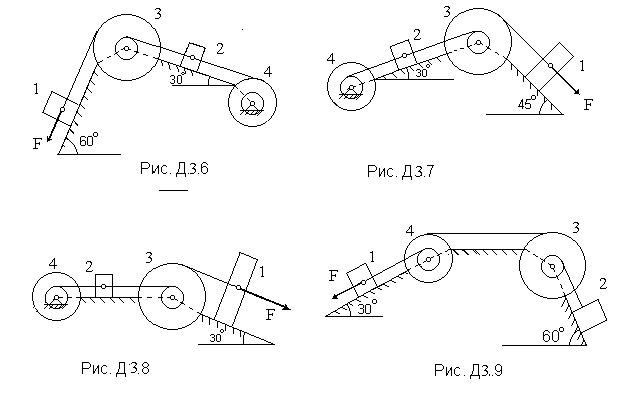 Указания. Задача Д3 – на применение теоремы об изменении кинетической энергии системы. При решении задачи учесть, что кинетическая энергия системы равна сумме кинетических энергий всех входящих в систему тел: эту энергию нужно выразить через ту скорость (линейную или угловую), которую в задаче надо определить. При определении работы все перемещения следует выразить через заданное перемещение s1, учтя, что зависимость между перемещениями здесь будет такой же, как между соответствующими скоростями. Когда по данным таблицы m2=0, груз 2 на чертеже не изображать; шкивы 3 и 4 всегда входят в систему. Пример Д3. Механическая система состоит из грузов 1 массой 4 кг и 2 массой 6 кг (коэффициент трения грузов о плоскость f=0,1) и ступенчатого шкива 3 массой 8 кг с радиусами ступеней R3=0,3 м, r3=0,1 м, (массу шкива считать равномерно распределенной по его внешнему ободу) (рис. Д2). Тела системы соединены друг с другом нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям. Под действием постоянной силы F=50 Н система приходит в движение из состояния покоя. При движении системы на шкив 3 действует постоянный момент сил сопротивлений, равный М =0,6 НМ. Определить значение искомой скорости первого груза в тот момент времени, когда перемещение точки приложения силы 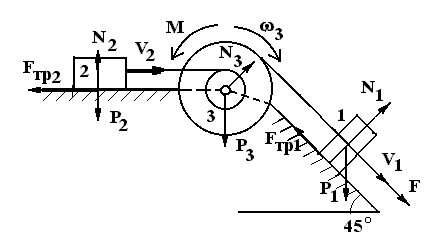 Рис. Д3 Решение. Применяем теорему об изменении кинетической энергии системы: для неизменяемой системы изменение кинетической энергии при ее некотором перемещении равно сумме работ внешних сил : Кинетическая энергия системы в начальный момент времени Т0=0, так как система находилась в покое. Кинетическая энергия системы в конечный момент времени равна сумме кинетической энергии всех входящих в нее тел: Т=Т1+Т2+Т3, где Находим соотношение между скоростями: Осевой момент инерции тела 3 находится так же, как и однородного кольца: так как масса распределена по его внешнему ободу) Подставляя эти значения в формулу кинетической энергии, получим: Подставляя значения масс тела, получим: Вычисляем сумму работ внешних сил: A(F)=FS1=50 Дж – работа постоянной силы F, А(Р1)= m1gh= m1gS1sinДж работа силы тяжести тела 1, (h- вертикальное перемещение тела 1), 3 S1/R3= - 2 ДЖ -работа вращающего момента, (3 - угол поворота тела 3), A(Fтр1)= -Fтр1S1=-fN1S1=-fm1gcosS1Дж -работа силы трения, приложенной к телу 1, (N1= m1gcos- нормальная реакция плоскости, на которой расположено тело 1), A(Fтр2)= -Fтр2S2=-fN2S2=-fm2gS1/3Дж- работа силы трения, приложенной к телу 2, (N2 =m2g - нормальная реакция плоскости, на которой расположено тело 1). Работа остальных внешних сил - сил Р2, Р3, N1, N2 ,N3 равна нулю, так как силы Р2, N1, N2 перпендикулярны направлению перемещения, а силы Р3 и N3 приложены в неподвижной точке. Подставляя значения определяем сумму работ внешних сил: Подставляя значения кинетической энергии и работы внешних сил в теорему об изменении кинетической энергии получим: Задача Д4По условию задачи Д3 найти ускорения грузов и угловые ускорения блоков, входящих в систему, а также силы натяжения нитей, связывающих тела системы. Указания. Для определения ускорений можно использовать теорему об изменении кинетической энергии системы в дифференциальной форме или общее уравнение динамики. Для определения силы натяжения нитей целесообразно использовать принцип Даламбера, при этом к каждому телу, которое движется поступательно приложить силу инерции, а к вращающимся телам –моменты инерции, после чего составить уравнения равновесия. Пример Д4. Механическая система состоит из грузов 1 массой 4 кг и 2 массой 6 кг (коэффициент трения грузов о плоскость f=0,1) и ступенчатого шкива 3 массой 8 кг с радиусами ступеней R3=0,3 м, r3=0,1 м, (массу шкива считать равномерно распределенной по его внешнему ободу) (рис. Д4). Тела системы соединены друг с другом нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям. Под действием постоянной силы F=50 Н система приходит в движение из состояния покоя. При движении системы на шкив 3 действует постоянный момент сил сопротивлений, равный М =0,6 НМ. Определить ускорения грузов и угловое ускорение блока, а также силы натяжения нитей (рис.Д4,а). 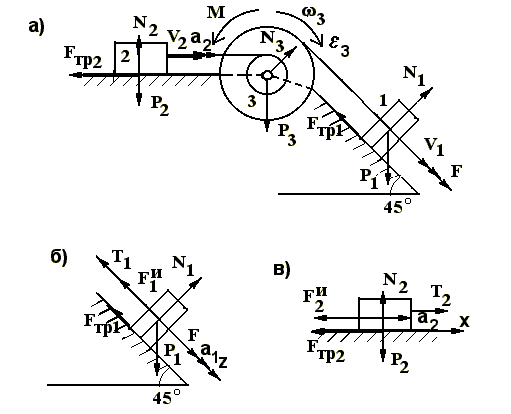 Рис. Д4 Решение. Применяем теорему об изменении кинетической энергии системы: для неизменяемой системы изменение кинетической энергии при ее некотором перемещении равно сумме работ внешних сил : Так как Т0=0, то формула (1) примет вид: Кинетическая энергия системы в произвольный момент времени определена в примере Д3 в зависимости от скорости первого тела: Сумму работ выразим как функцию перемещения S1 Используя данные, полученные в примере Д3, имеем: Подставляя значения кинетической энергии и работы в формулу (2) получим Продифференцируем (5) по времени Ускорения остальных тел найдем, учитывая, что зависимости между ускорениями будут такие же, как и между скоростями. а2=а1/3=1,99 м/с2, Для определения натяжения нитей, используем принцип Даламбера. Для это рассмотрим равновесие тел 1 и 2, прикладывая к ним силы инерции Проектируя уравновешенную систему сил, приложенных к телу 1 на ось Z (рис.Д4, б) получим: Для системы сил, приложенных к телу 2 составим уравнение проекций на ось Х (рис.Д4,в) |