Учебно-методическое пособие для организации самостоятельной работы студентов по теме «Электрические измерения». Методическое пособие по теме_ _Электрические измерения_. Методическое пособие для организации самостоятельной работы студентов по теме Электрические измерения Для специальности 2022
 Скачать 1.96 Mb. Скачать 1.96 Mb.
|

|
3.2. Знаки и символы, наносимые на лицевой панели прибора Приведем для примера расшифровку всех знаков символов, помещенных на изображениях лицевых панелей приборов, показанных на рис.3.1. Прибор М265: М – буквенный шифр магнитоэлектрической системы; 265 – номер разработки (модели); 1983 – год выпуска; μА – микроамперметр; 2кΩ – внутреннее сопротивление 2 кОм; — - предназначен для использования в цепях постоянного тока; …- графическое обозначение магнитоэлектрической системы, защищенной от действия внешних магнитных полей; 1, 5 – класс точности; ┴ - рабочее положение вертикальное; - измерительный механизм изолирован, и сопротивление изоляции испытано напряжением 2 кВ. Прибор Э412: Э – буквенный шифр электромагнитной системы; 412 – номер разработки; 1989 г. – год выпуска; μА – микроамперметр; 100 Hz - частота; 3кΩ – внутреннее сопротивление; ≈ - предназначен для использования в цепях переменного и постоянного тока; ∑ - графическое обозначение электромагнитной системы; 4,0 – класс точности; - измерительный механизм изолирован, и сопротивление изоляции испытано напряжением 2кВ. 3.3.Измерительные механизмы и приборы различных систем 3.3.1. Устройство, принцип действия магнитоэлектрического и электромагнитного механизмов Магнитоэлектрический механизм работает лишь при постоянном токе, но ввиду высоких качеств его широко применяют в соединении с различными преобразующими устройствами для измерений переменного тока. При соединении магнитоэлектрического механизма и полупроводникового выпрямителя получают выпрямительный (детекторный) прибор; а если этот же механизм соединить с термопарами, образуется термоэлектрический прибор. В магнитоэлектрическом механизме вращающий момент создается взаимодействием поля постоянного магнита и измеряемого тока катушки. Механизмы данной системы могут быть с подвижной катушкой и с подвижным магнитом. Последние обладают весьма низкой точностью и применяются относительно редко. По своим конструктивным особенностям магнитоэлектрические измерительные механизмы с подвижной катушкой делятся на механизмы с внешним магнитом и механизмы с внутрирамочным магнитом. Магнитная система механизмов с внешним магнитом (рис. 3.2.) состоит из сильного постоянного магнита 1, магнитопровода 2, полюсных наконечников 3 и сердечника. Три последние части изготовляют из легко обрабатываемой магнитомягкой стали. В результате тщательной обработки полюсных наконечников и сердечника в воздушном зазоре между ними создается практически равномерное радиальное магнитное поле. В механизмах с внутрирамочным магнитом (рис. 3.3.) сердечником служит постоянный магнит 1. Его охватывает кольцевой магнитопровод 3, изготовленный из магнитомягкой стали. Магнитодвижущая сила постоянного магнита неодинакова на различных участках воздушного зазора и при равномерном зазоре создавала бы примерно синусоидальное распределение индукции в зазоре вдоль окружности сердечника. Но посредством накладок 2 из магнитомягкой стали удается сделать магнитное поле в большей части зазора практически равномерным, радиальным. В обеих конструкциях измерительных механизмов подвижная катушка 4 устанавливается на растяжках или опорах и может поворачиваться относительно сердечника в пределах примерно 90°. Эта катушка наматывается на алюминиевый каркас. Такую подвижную часть принято называть рамкой. Алюминиевый каркас служит в этом механизме магнитоиндукционным успокоителем, так как он представляет собой короткозамкнутый виток, помещенный в поле постоянного магнита. При перемещении подвижной части изменяется потокосцепление каркаса, вследствие чего в нем индуктируется эдс и возникает ток в каркасе. Ток, взаимодействуя с полем постоянного магнита, создает силу, тормозящую колебания рамки. 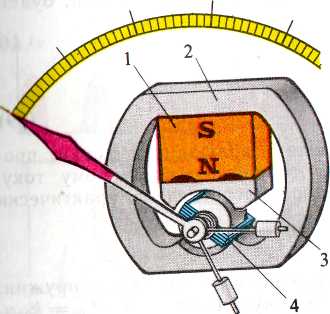 Рис 3.2.Магнитоэлектрический механизм с внешним магнитом: 1 — постоянный магнит, 2 — магнитопровод, 3 — полюсные наконечники, 4 — подвижная катушка Вращающий момент в приборе определяется на основании закона электромагнитной силы. На каждый из проводников катушки воздействует сила F = BIl, здесь l— активная длина проводника, приблизительно равная высоте катушки h.Каждый из ωвитков катушки имеет две активные стороны. Плечо приложения силы равно половине ширины dкатушки, на основании чего вращающий момент, воздействующий на подвижную часть магнитоэлектрического механизма, будет: а так как hd = S – площадь катушки, то Следовательно, в магнитоэлектрическом механизме вращающий момент пропорционален магнитной индукции в воздушном зазоре и измеряемому току. Так как магнитная индукция в воздушном зазоре распределена практически достаточно равномерно, то можно считать, что Противодействующий момент Мпрсоздается кручением растяжек или пружин. Они служат вместе с тем для подвода тока в подвижную часть, т.е. Мпр = kврI . При установившемся отклонении ток Угол отклонения подвижной части прямо пропорционален измеряемому току — магнитоэлектрический прибор имеет равномерную шкалу (поскольку магнитную индукцию можно считать одинаковой в пределах рабочей части воздушного зазора). Применив правило левой руки, легко убедиться, что подвижная катушка стремится принять положение, при котором направление ее поля совпадает с направлением основного магнитного поля, создаваемого магнитом. Направление вращающего момента изменяется при изменении направления тока, поэтому при включении в цепь переменного тока промышленной частоты стрелка будет оставаться на нулевом делении, так как на подвижную часть будут воздействовать быстро изменяющиеся вращающие моменты противоположного направления. Магнитоэлектрические механизмы весьма чувствительны, так как их основное магнитное поле возбуждается постоянным магнитом, а не измеряемым током. По этой причине для высокочувствительных нулевых приборов (гальванометров) обычно применяют магнитоэлектрические измерительные механизмы. Из-за большой чувствительности магнитоэлектрический механизм отличается малым собственным потреблением энергии. Внешние магнитные поля мало влияют на показания этих приборов в результате собственного сильного магнитного поля и экранирующего действия магнитопровода из магнитомягкой стали. Недостатком системы можно считать относительно высокую стоимость механизмов. 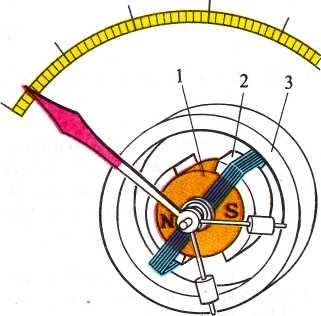 Рис.3.3.Магнитоэлектрический механизм с внутрирамочным магнитом: 1 — постоянный магнит, 2 — накладки, 3 — магнитопровод Электромагнитный механизм показан на рисунках 3.4, 3.5,3.6. В приборах этой системы перемещение подвижной части вызывается воздействием магнитного поля неподвижной катушки на сердечник из магнитомягкого ферромагнитного материала, укрепленный на одной оси со стрелкой. Электромагнитные силы стремятся переместить сердечник так, чтобы магнитный поток в механизме был наибольшим. В настоящее время широко применяют три основные конструкции электромагнитных механизмов. В механизмах с плоской катушкой (рис. 3.4) сердечник 1 из магнитомягкого материала втягивается в относительно узкую щель катушки 2 при наличии в ней измеряемого тока. Для усиления магнитного поля и регулирования вращающего момента служит второй неподвижный сердечник 3. В механизмах с круглой катушкой (рис. 3.5.) внутри катушки 1 находятся два ферромагнитных сердечника 2 и 3. Один из них 2 неподвижен, а второй 3 (подвижный) укреплен на оси. При наличии в катушке измеряемого тока сердечники намагничиваются и стремятся оттолкнуться друг от друга, что и создает вращающий момент. В механизмах с магнитопроводом (рис. 3.6.) подвижный сердечник 1 помещен в зазоре магнитопровода между когтеобразными полюсными наконечниками 2 и 3. Магнитный поток возбуждается измеряемым током катушки 4. Подвижный сердечник, имеющий форму сектора, стремится занять положение, соответствующее максимуму энергии магнитной системы. Подвижная часть электромагнитных приборов устанавливается на растяжках или на опорах. Для создания противодействующего момента используют кручение растяжек или спиральной пружины. Электромагнитные механизмы с круглой или плоской катушкой, имеющие слабое магнитное поле, снабжаются экранами 4 (см. рис.3.5) для защиты от внешних магнитных влияний. Для успокоения в электромагнитных приборах применяются воздушные (см. рис.3.4.), магнитоиндукционные (см. рис.3.5.) и жидкостные успокоители. Вращающий момент этих приборов пропорционален квадрату тока I2и изменению индуктивности системы при повороте подвижной части Следовательно, изменение направления измеряемого тока не изменяет направления вращающего момента: при изменении направления тока происходит одновременное изменение полярности сердечников и направления магнитного поля. В принципе приборы пригодны для измерения постоянного и переменного токов. Но при постоянном токе влияние гистерезиса может вызывать разницу в показаниях прибора при возрастании и убывании тока (доходящую примерно до 2%). При переменном токе потери в сердечнике на гистерезис и вихревые токи несколько уменьшают отклонения подвижной части. В лабораторных и переносных приборах при применении сердечников из пермаллоя разница в показаниях при постоянном и переменном токах становится незначительной. Но большинство щитовых приборов этой системы предназначается для измерений только переменного тока. Приборы электромагнитной системы по конструкции просты, дешевы, весьма устойчивы к перегрузкам, благодаря этим эксплуатационным качествам щитовые электромагнитные амперметры и вольтметры переменного тока широко применяются на практике. 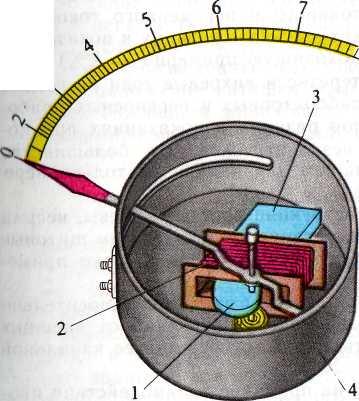 Рис. 3.4. Электромагнитный механизм с плоской катушкой: 1 — подвижный сердечник, 2 — катушка, 3 — неподвижный сердечник, 4 — экран 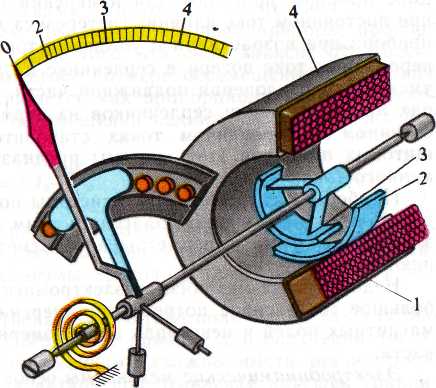 Рис.3.5.Электромагнитный механизм с круглой катушкой: 1 — катушка, 2 и 3 — сердечники, 4 — экран 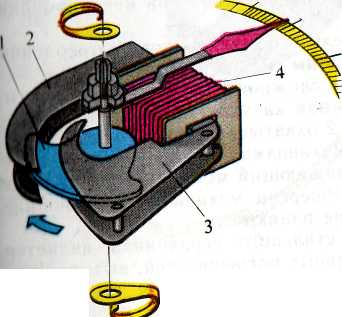 Рис. 3.6.Электромагнитный механизм с магнитопроводом: 1 – подвижный сердечник; 2, 3 – наконечники, 4 – обмотка Недостатками механизмов электромагнитной системы являются относительно большое собственное потребление энергии, зависимость показаний от внешних магнитных полей и некоторая неравномерность шкалы, особенно в ее начальной части. 3.3.2.Измерение тока и напряжения Измерение постоянного тока Постоянные токи порядка 10-3 – 10-2 А измеряют, как правило, приборами непосредственной оценки – миллиамперметрами и амперметрами магнитоэлектрической, электромагнитной и электродинамической систем, а также электронными аналоговыми и цифровыми приборами. Для измерения больших постоянных токов (свыше 100 А) обычно применяют амперметры магнитоэлектрической системы с использованием шунтов, подключаемых параллельно измерительному механизму ИМ (рис. 3.8,а). Сопротивление шунта подбирается из соотношения Rш = Rи/ (n – 1), где RА – сопротивление обмотки измерительного механизма; n = I/Iи – коэффициент шунтирования; I - измеряемый ток; Iи – допустимый ток ИМ.  Рис. 3.7. Внешний вид шунта 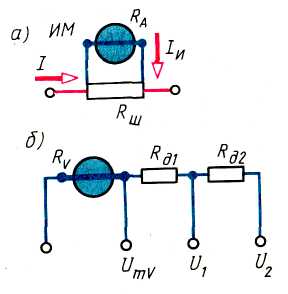 Рис. 3.8.Измерение силы тока и напряжения а) Амперметр магнитоэлектрической системы с использованием шунтов, подключаемых параллельно измерительному механизму; б) Схема включения вольтметра с добавочными резисторами Rд  Рис. 3.9.Добавочный резистор, намотанный на изолирующую пластину Измерение переменного тока При измерении переменных токов важно, какое значение тока измеряется: действующее, амплитудное или среднее. Эта необходимость вызвана тем, что все приборы градуируются в действующих значениях синусоидального, а реагируют подвижные части некоторых измерительных механизмов на среднее значение измеряемой величины. Переменные токи до 100 мкА измеряют обычно цифровыми микроамперметрами. Токи выше 100 мкА измеряют выпрямительными микроамперметрами. Для измерения переменных токов в диапазоне 10 мА – 100А используют электромагнитные, электродинамические и выпрямительные приборы, работающие в частотном диапазоне до десятков килогерц, и термоэлектрические приборы в диапазоне частот до сотен мегагерц. Большие переменные токи измеряют теми же приборами, но с использованием измерительных трансформаторов тока. Измеряют переменные токи и косвенным способом. В этом случае последовательно в измерительную часть включают образцовый регистр и измеряют падение напряжения на нем. ЗАПОМНИТЕ При измерении тока включение в измеряемую цепь амперметра с внутренним сопротивлением RА или образцового резистора изменяет режим работы цепи. Вследствие этого появляется методическаяпогрешность измерения тока δ1 = - 1/ (1 + Rвх А/RА), где Rвх А – входное относительно зажимов амперметра сопротивление цепи. Чем меньше сопротивление обмотки амперметра, тем меньше методическая погрешность измерения. |