АрдуиноМетодПособое_240123. Методическое пособие для преподавателей Обучение робототехническому программированию на основе комплексной платформы Arduino
 Скачать 6.18 Mb. Скачать 6.18 Mb.
|

|
ТАДЖИКСКИЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ  Туйчиев Л. МЕТОДИЧЕСКОЕ ПОСОБИЕ для преподавателей «Обучение робототехническому программированию на основе комплексной платформы Arduino»  Душанбе – 2023 Туйчиев Л. Методическое пособие «Обучение робототехническому программированию на основе комплексной платформы Arduino» / Туйчиев Л. – Таджикский технологический университет 2023. –60 с. УДК 372.862 Методическое пособие содержит рекомендации для планирования и организации обучения по курсу «Обучение робототехническому программированию на основе комплексной платформы Arduino», включает в себя лекции, практические занятия и материалы лабораторных работ, контрольные вопросы к каждым темам. В учебном пособии по тематическому плану систематизированы темы по робототехнике, микроконтроллеру, сигналам, датчикам для интеллектуальных DIY – устройств, среде программирования IDE Arduino, концепции Интернета вещей (Internet of Things, IoT) и платформа TinkerCad, Пособие предназначено для преподавателей информатики и физики, для обучения студентов, бакалавров и магистров по направлениям «Программная инженерия», «Информационные системы и технологии». Учебный курс «Обучение робототехническому программированию на основе комплексной платформы Arduino» подготовлен кафедрой «Физика и технических дисциплин» факультета «Телекоммуникации и профессионального обучения» Таджикского технологического университета. Рецензенты: Иркаев Бахор Нигматович, к..ф.-м.н., доцент кафедры «Информатика и информационной технологии» Российско -Таджикский (Славянский) Университет, член корреспондент «Инженерной Академии» РТ. Хакёров И., к.т.н., заведующий кафедрой «Физика и технических дисциплин» факультета «Телекоммуникации и профессионального обучения» ТТУ
Введение Составляющими науки робототехники являются технология и инженерия. Поэтому программы обучения должны состоять из дисциплин естественных наук, физики, биологии, технологии и инженерии. Такие программные обучения представляет собой инструмент для развития у студентов навыков программирования, алгоритмического и творческого мышления. В современном образовании такой подход называется STEAM (Science, Technology, Engineering, Arts, Math) технологией, направленной на разностороннее развитие личности в рамках одной образовательной дисциплины. Сама робототехника является областью науки и техники, которая сориентированная на создание роботов и робототехнических систем, предназначенных для автоматизации сложных технологических процессов и операций, в том числе, выполняемых в недетерминированных условиях, для замены человека при выполнении тяжелых, утомительных и опасных работ. С течением времени, робототехника с использованием достижения науки и техники быстро развивается. Современные роботы оснащены интеллектуальным управлением микроконтроллерами. Они принципиально отличаются от роботов предыдущих поколений сложностью выполняемых своих функций и совершенством системы автоматического управления, которая включает в себя те или иные элементы искусственного интеллекта. Такие роботы предназначены не столько для имитации физических действий человека, сколько для автоматизации его интеллектуальной деятельности. В настоящее время размеры роботов варьируются от нескольких метров до нескольких сотен нанометров. Нано роботы состоят из нано компонентов и представляют себя отдельные функциональные блоки, способные выполнять простые измерительные, регулирующие или управляющие операции. Ее координацией и обменом информацией между нано устройствами является так называемые нано сети. Если соединим нано устройств с существующими нано сетями и Интернетом, возникает новая сетевая парадигма, называемая Интернетом нано вещей. Студент до проектирования робота должен иметь минимальные знания: - о назначение электронных компонентов Arduino, аппаратно- технической платформы Arduino, работе микроконтроллера, основных датчиков для интеллектуальных DIY – устройств, природу радиосигналов и среду программирования Ардуино (IDE). Уметь собирать электронную схему на электронном печатном плате и уметь работать с измерительными приборами. Исходя из этого, данное методическое пособие содержит курс лекции и занятия для проведения практических занятий и лабораторных работ, что позволит студентам получить знания и навыки, необходимые для проектирования и разработки интеллектуальных систем на базе микроконтроллерных устройств Arduino. В пособие студенту для успешной сборки электрической цепи и кодирование скетч Arduino и проверки работоспособности, предлагается использование эмулятора Arduino Тинкеркад (Tinkercad Circuits Arduino) с интернета для моделирования процесса, после чего схему можно перенести на реальную платформу Arduino, что сэкономит время и финансовые средства и ускорит обучения робототехническому программированию. Пособие также можно использовать для бакалавров и магистров, обучающихся по направлению «Информационно коммуникационные технологии и системы связи», «Умные (smart) приложения», «Информационные системы и технологии», «Интеллектуальные системы в гуманитарной сфере». Состав методического пособия В состав методического пособия «Обучение робототехническому программированию на основе комплексной платформы Arduino» входят: 1. Методическое пособие для преподавателей с лекциями, практическими заданиями, примерами тестов и заданий; 2. Сборник презентаций к занятиям; 3. Видео-уроки к занятиям. В таблице №1 представлено наличие материалов каждого типа для занятий. Таблица №1
Характеристика курса Место курса в учебном плане: - курс «Обучение робототехническому программированию на основе комплексной платформы Arduino» может реализовываться как отдельный курс образования по информатике изучению программной инженерии и искусственного интеллекта. Состав участников образовательного процесса: - Курс «Обучение робототехническому программированию на основе комплексной платформы Arduino» ориентирован студентам первого по третьих курсов, также возможно бакалаврам и магистрам знакомых с основами программирования, физики, электроники, схемотехники. Форма обучения:- Программа курса «Обучение робототехническому программированию на основе комплексной платформы Arduino» может быть реализована в очной, заочной форме и возможно с применением дистанционных образовательных технологий. Трудоемкость курса: Курс «Обучение робототехническому программированию на основе комплексной платформы Arduino» рассчитан на 72 академических часов, но при необходимости преподаватель может варьировать длительность курса от 24 до 48 академических часов. В таблице №2 представлено структуру курса. Структура курса Курс содержит следующие темы:
При необходимости курс может быть сокращен путем сокращения и объединения некоторых тем и сокращения количества лабораторных работ. Курс может быть расширен путем добавления дополнительных материалов по программированию и алгоритмизации после темы “Основы программирования Arduino” посвященных проектной работе со студентами по разработке проекта интеллектуального устройства. В рамках данных рекомендаций по курсу, предполагается, что можно студентам задавать домашние работы, например по конструированию некоторых деталей к заданию или написанию скетча к заданию. Заданные домашние работы, проверяются вне занятий, но при большем имеющим количестве занятий, решения домашних заданий можно разбирать в аудитории и использовать самооценку или взаимопроверку студентов. Краткое содержание курса Тема 1. Введение в разработку интеллектуальных устройств на базе Arduino . Что такое Робототехника? Современные роботы. Теория: История робототехники. Искусственный интеллект. Необходимые технические и программные компоненты для создания роботов. Миниатюрные и простейшие нано -устройства. Тема 2. Что такое система Интернет Вещей (IoT)» и из каких компонентов состоит? Применение Интернета Вещей. Теория: История Internet и IoT. Компьютерные сети. Структура Internet. Интернет нано Вещей. Web-сервер. IP-адрес, MAC-адрес, доменные имена, протоколы. Умный дом. Тема 3. Аппаратно- техническая платформа Arduino и его компоненты. Теория: Назначение, составные части, монтажная электронная макетная доска. Тема 4. Микроконтроллер. Теория: Назначение, структура. Плата для разработки. Одноплатный компьютер. Arduino, структура, выводы Arduino (см.рис.1.) Тема 5. Что такое радиосигналы?. Теория: Свойства, характеристики радиоволн. Аналоговые и цифровые сигналы. Кодирование сигналов. Преобразование аналоговых сигналов в цифровые сигналы и обратно. Тема6. Основные датчики для умных DIY – устройств. Теория: Для чего нужны датчики? Какие бывают датчики? Выходной сигнал датчика. Датчик измерения уровня воды. Климатические датчики. Датчики расстояния и движения. Датчики света и цвета. Датчики газа. Датчики звука. Тема7. Среда программирование IDE Arduino. Основы программирования Arduino. Теория: Среда программирование IDE Arduino. Скетч. Редактор. Компиляция и отладка. Прошивка памяти. Переменные, типы данных. Практика: Решение задач. Тема 8. Электронные схемы и платформа TinkerCad. Теория: TinkerCad - облачный сервис для моделирования 3D-объектов и электрических схем. Симуляция и эмуляция. Основные элементы интерфейса TinkerCad. Практика: Сборка и симуляция схемы в TinkerCad. Тема 9. Выполнение лабораторных работ. Теория: резисторы, конденсаторы, светодиоды, ключи и кнопки, датчики, компараторы, сервоприводы. Практика: Лабораторная работа “Светодиод, управляемый кнопкой”. Лабораторная работа “Управление освещением из нескольких мест”. Лабораторная работа “Освещение, регулируемое потенциометром”. Лабораторная работа “Автоматическое освещение на базе компаратора Lm393”. Лабораторная работа “Мигающий светодиод”. Лабораторная работа “Блок управления освещением”. Лабораторная работа “Работа с 7-ми сегментным экраном”. Лабораторная работа “Работа с сервоприводом”. Лабораторная работа “Работа с реле”. Лабораторная работа “Arduino и звук”. 10. Итоговое занятие. Контрольные вопросы, для проверки усвоение студентами материалов курса и творческое задание, проверяющее полученные умения и навыки. В таблице №3 представлено тематическое планирование методического пособия. Тематическое планирование
Тема 1. Введение в робототехнику.Что такое Робототехника? Современные роботы. Тип и форма занятий: Ознакомления с новым материалом (лекция, практические занятия). Основные понятия, рассматриваемые на занятии: История робота; Типы роботов; Интеллектуальные устройства; Основные составляющие робототехники. Робототехника является областью науки и техники, которая ориентирована на создание роботов и робототехнических систем, предназначенных для автоматизации сложных технологических процессов и операций, для замены человека при выполнении тяжелых, утомительных и опасных работ. Объектами деятельности являются роботы промышленного, так и непромышленного назначения. Краткая история робототехники Основной причиной, заставляющей человека развивать новые сферы науки и техники, является присущее ему с давних пор стремление улучшить свою жизнь и возможности во взаимодействии с внешней средой. Характер такого взаимодействия весьма разнообразен и может быть не только трудным, но и физически непосильным. Поэтому с незапамятных времен люди мечтали изобрести различные инструменты, механизмы, машины с целью облегчения своего труда, повышения качества и производительности. Вначале это были мечты, существовавшие в мифах, сказках, преданиях. Известен, например, древнегреческий миф о создании богом огня Гефестом двух рабынь из золота, прислуживающих ему, а также золотых треножников, выполнявших простейшие команды типа: принести, подать, унести. При раскопках гробниц фараонов археологи обнаруживали усыпальницы детей, где были найдены куклы с подвижными руками и ногами. Это первое свидетельство о стремлении людей сотворить искусственного человека. Типы роботов Промышленные роботы (ПТ)предназначены для выполнения двигательных и управляющих функций в производственном процессе. Манипуляционный робот – автоматическое устройство, состоящее из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора [1]. Они позволяют значительно автоматизировать процесс конвейерного производства, что, в свою очередь, позволяет увеличить производительность труда, уменьшить издержки производства, а также ослабить влияние человеческого фактора, за счет чего повысится конкурентоспособность. В зависимости от рода выполняемой роботами работы выделяют: 1. Литейные— предназначены для отливки изделий расплавленным материалом, в том числе и 3D принтеры. Главной технологической сложностью разработке являются высокие температуры при плавлении. 2. Роботы для механических обработок— используются при обработке изделий с помощью механического воздействия с применением режущего инструмента, кузнечных работах, а также прессовки и штамповки. 3. Сборочные— в большинстве случаев это манипуляторы использующие различные инструменты, как для механического соединения, так и для пайки электронных компонентов. 4. Окрасочные— используются для автоматического нанесения лакокрасочного покрытия, а также последующей полировки изделия. 5. Строительные— предназначены для автоматизации строительства, а также добычи ресурсов, сюда входят и роботизированные средства доставки строительных материалов и машины для постройки различных объектов. 6. Фасовочно-сортировальные— используются для проверки качества продукта, его сортировки и фасовки в упаковку, в большинстве случаев это последний этап автоматизации на конвейерах, не считая средств доставки изделий потребителям. 7. Транспортные— к этому классу относятся любые роботизированные средства доставки грузов, наиболее распространёнными среди них являются конвейерные. 8. Сельскохозяйственные— роботы, основной задачей которых является автоматизация сельскохозяйственного производства, например, оросители, комбайны, трактора и др. Бытовые роботы— роботы, предназначенные для помощи человеку повседневной жизни. Следующие классы: 1. Транспортные роботы— используются для перевозки пассажиров и грузов в автоматическом режиме. 2. Умный дом — интеллектуальная, роботизированная система, главной задачей которой является автоматизация и согласование всех систем жизнеобеспечения и безопасности. 3. Робот-помощник— универсальный класс роботов способных на физическую и интеллектуальную помощь хозяину. 4. Робот-домохозяйка— класс роботов выполняющих повседневную работу в доме, к нему относятся роботы-повара, пылесосы, мойщики окон, посудомойки, очистители воздуха, автокормушки, уборщики бассейнов и др. Социальные роботы— роботы, способные в автономном или полуавтономном режиме взаимодействовать и общаться с людьми в общественных местах или домах: 1. Роботы члены семьи— устройства, способные практически полностью «влиться» в состав семьи, способны передвигаться по дому, взаимодействовать с окружающими. 2. Роботы-животные— устройства, заменяющие домашних животных, способны копировать их движения и звуки. 3. Роботы-игрушки — средства развлечения детей, способствующие их обучению различным навыкам и знаниям. Медицинские роботы — роботы, созданные для выполнения медицинских манипуляций под управлением человека: 1. Роботы-хирурги— применяются для хирургического лечения заболеваний и травм, кроме выполнения роли хирурга, могут выполнять функции ассистента при операциях. 2. Роботы-фармацевты — способны изготавливать и раздавать лечебные препараты пациентам. 3. Роботизированные протезы— предназначены для замены утраченных или необратимо повреждённых частей тела искусственными роботизированными устройствами. 4. Роботизированные трансплантаты— используются для замены поврежденных или не функционирующих органов и тканей на роботизированные устройства, способными действенно их заменить. 5. Роботы-сиделки— способны заменить работников младшего медицинского персонала при уходе за больными. 6. Роботизированные симуляторы пациентов— предназначены для практического обучения и отработки навыков медицинских специалистов. 7. Роботы-диагносты— способны на основе данных анамнеза поставить диагноз и назначить лечение. Исследовательские роботы— это устройства для проведения различных исследований, в том числе и возможностей использования роботов ля выполнения различных функций. К ним относятся многочисленные приборы как автоматического, так и полуавтоматического плана. По средам использования различают: 1. Космические— используются для проведения исследований в условиях космоса, к ним можно отнести различные исследовательские спутники. 2. Наземные— предназначены для проведения исследований на поверхности земли, в случае проведения исследований на других планетах, роботов называют планетоходами. 3. Подземные— способны проводить исследования под поверхностью почвы, или непосредственно под грунтом или же в пещерах и гротах. 4. Морские— устройства для проведения исследований в надводном или подводном положении. Боевые роботы— это многофункциональные технические устройства с антропоморфным (человекоподобным) поведением, частично или полностью выполняющие функции человека при решении определенных боевых задач. Позволяет заменить человека при выполнении боевых задач, сохранить ему жизнь, а также выполнить задачи, несовместимые с его возможностями. Посредам использования различают: 1. Воздушные БПЛА (Беспилотный летательный аппарат)— предназначены для выполнения воздушных миссий, таких как наблюдение и разведка, координация нанесения ударов по противнику, создание рядом с собой беспроводных сетей связи. 2. Сухопутные— к этому классу относятся наземные боевые машины, это беспилотные военные автомобили, системы разведки, охранные системы, роботы-сапёры, а также полноценные боевые комплексы. 3. Морские— этот класс объединяет роботизированные устройства надводного и подводного типа, основными задачами которых является разведка, сопровождение, патрулирование и поиск мин. Подведение итогов темы и ответы на вопросы студентов (5минут) Контрольные вопросы: 1. Что такое робот? 2. Из каких основных элементов состоит робот? 3. Где применяется робототехника? 4. На какие группы можно разбить роботы по назначению? 5. Перечислите виды роботов и чем они отличаются друг от друга? 6. Какие параметры определяют технический уровень роботов? 7. Какими характеристиками отличаются интеллектуальные роботы? 8. Что такие нано роботы? 9. Что такие микропроцессоры? Тема 2. Что такое система Интернет Вещей», и из каких компонентов состоит? Интернет нано Вещей. Тип и форма: Ознакомления с новым материалом (лекция, практические занятий). Основные понятия, рассматриваемые на занятие: • История Internet. • Internet of Things, IoT. • Компьютерные сети. • Структура Internet. • Протоколы. • Web-сервер. • IP-адрес. • MAC-адрес. • Доменное имя. • Нано устройств, нано компоненты. • Интернет нано Вещей. Слово Интернета вещей (анг., Internet of Things, IoT), Сущность Интернета вещей проста. Если все то, что окружает нас, например -предметы и устройства (роботы, домашние приборы, одежда, продукты, транспорт, промышленное оборудование и др.) снабдить миниатюрными идентификационными и сенсорными (чувствительными) устройствами, и соединить их с помощью каналов связи, с ними можно не только отслеживать эти объекты и их параметры в пространстве и во времени, но и управлять ими, а также включать информацию о них в общую «умную планету». В самом общем виде с информационно - коммуникационной точки зрения Интернет вещей можно записать в виде следующей символической формулы: IoT = Сенсоры (датчики) + Данные + Сети + Услуги. Интернет вещей – это глобальная сеть компьютеров, датчиков (сенсоров) и исполнительных устройств (актуаторов), связывающихся между собой с использованием интернет протокола IP (Internet Protocol). Для решения определенной задачи компьютер связывается через публичный интернет сеть с небольшим устройством, к которому подключен соответствующий датчик (например, температуры), как это показано на рисунке 1.  Рис.1. Фрагмент интернет вещей. При внедрении Интернета вещей вся наша повседневная жизнь кардинально изменится, уйдут в прошлое поиски нужных вещей, дефициты товаров или их перепроизводство, кражи автомобилей и мобильных телефонов, поскольку будет точно известно, что, в каком месте и в каком количестве находится, производится и потребляется. Поэтому концепция IoT играет определяющую роль в дальнейшем развитии инфокоммуникационной отрасли общесттва. История Internet и IoT. В конце XIX - начале XX века стали распространятся электрические телеграфы, которые позволяли осуществлять связь между двумя устройствами. В 1967 году исследователь Дональд Дэвис представил на симпозиуме в Англии свое изобретение пакетную коммутацию, суть которой состояла в том, что при передаче данных между вычислительными устройствами их необходимо разделять на небольшие фрагменты, эти фрагменты были названы словом пакет (англ. packet). Теперь в современной сети Интернет пакеты данных используются повсеместно. В 1984 году Национальный фонд науки США, используя модель ARPANET, создает гражданскую межуниверситетскую сеть NSFNet. Появление NSFNet является началом развития сети Интернет. В 1988 году был разработан протокол Internet Relay Chat (IRC), благодаря чему в Интернете стало возможно общение в реальном времени. Реализация гиперссылок была разработана в 1989 году Тимом Бернерсем-Ли. Проект стал известен под названием «Всемирная паутина». Тим Бернерс-Ли с командой разработал и внедрил идентификаторы URI (URL,который можно наблюдать в адресной строке браузера это частный случай URI), протокол HTTP и язык HTML.В начале 1990-х Тим Бернерс-Ли публикует техническую документацию по протоколам и стандартам Всемирной паутины. Начинается быстрый рост количества интернет-ресурсов. В 1994 году появляется компания Yahoo, в 1997 году - Google и в 2001 году - Википедия. Интернет Вещей. Первым термин Интернет Вещей предложил Кевин Эштон во время презентации в компании Procter and Gamble в 1999 году. Кевин Эштон называл этот термин, как Internet for Things. Основатель термина был уверен, что концепция Интернет Вещей – это возможность наделить компьютеры дополнительной информацией, собранной при помощи датчиков и RFID-меток [2]. В 2007 году появляется онлайн сервис “Пачбей”, который служил для сбора данных и их визуализации. Это решение позволило соединить данные от множества датчиков по всему миру в один сервис, при помощи которого стало возможно собирать и обрабатывать данные с удаленных устройств и предоставлять новые сервисы. Следующим знаковым периодом стал 2008-2009 год, когда компания Cisco сделала заявление, что число устройств, подключенных к Интернет, превысило численность населения Земли. В 2010 и 2011 годах появились знаковые научные проекты IoT-A и iCore. IoT-A предложил модель архитектуры Интернета Вещей с описанием всех функциональных блоков архитектуры. Проект iCore предложил ряд концепций и алгоритмов для разработки интеллектуального Интернета Вещей с рядом самонастраивающихся функций, которые по максимуму могли обеспечить запросы пользователя. Интернет вещей повлек за собой развитие, так называемых «туманных вычислений», смысл которых в переносе вычислений от единых ЦОДов (центров обработки данных) к большому количеству распределенных устройств, взаимодействующих друг с другом [4]. В рамках курса будет необходимо понимание следующих терминов: Компьютерная или вычислительная сеть — любая система, позволяющая обмениваться данными между вычислительными устройствами. По архитектуре сети делятся на две больших категории сети с иерархией (клиент-сервер) и одноранговые (пиринговые) сети. Сети могут функционировать поверх существующих сетей. Протокол связи — это система правил, позволяющая двум и более субъектам передавать информацию. Протокол определяет правила, син таксис, семантику и синхронизацию коммуникации, а также определяет возможные способы устранения ошибок или обозначает их отсутствие. Сервер — аппаратное или программное обеспечение, которое обеспечивает функциональные возможности для других программ или устройств, так называемых “клиентов”. Один сервер может обслуживать несколько клиентов, а один клиент может использовать несколько серверов. Web-сервер — серверное программное обеспечение, которое принимает и обрабатывает запросы от клиентов, чаще всего клиентами выступают веб-браузеры. В ответ на запрос клиента web-сервер выдает данные, например, HTML-страницу, изображение, медиапоток. IP-адрес — уникальный сетевой адрес узла в компьютерной сети, в 4-й версии IP-адрес представляет собой 32-битное число. Распространена форма записи IP-адреса (IPv4) в виде четырёх десятичных чисел значени- ем от 0 до 255, разделенных точками, например, 192.178.1.3 (11000000.1011 0010.00000001.00000011). MAC-адрес — уникальный идентификатор, присваиваемый оборудованию в компьютерных сетях Ethernet. При проектировании стандарта Ethernet было предусмотрено, что каждая сетевая карта (равно как и встроенный сетевой интерфейс) должна иметь уникальный номер, состоящий из 6-ти байт, установленный в ней при изготовлении. Уникальность MAC-адресов достигается тем, что каждый производитель получает в координирующем комитете диапазон из адресов и, по мере исчерпания выделенных адресов, может запросить новый диапазон. Поэтому по трём старшим байтам MAC-адреса можно определить производителя оборудования. Доменные имена — символьное имя интернет-ресурса (например, yandex.ru). Доменные имена бывают: первого уровня, например, домены стран (.ru, .ua) или тематические домены (.edu, .org) второго уровня, например, sitename.com, yandex.ru, и так далее. При помощи DNS (распределенной системы для получения информации о доменах) можно получить из доменного имени ip-адрес сервера. Таким образом, имя ресурса и его расположение в сети (ip-адрес) разделены, и можно изменять домен, не меняя сервера и наоборот. Применение Интернета Вещей. Основные понятия, рассматриваемые на занятии: • Интеллектуальные устройства. • Интеллектуальный дом. • Интеллектуальный город. Применение ноно Интернета Вещей. • Миниатюрные нано -устройства. • Нано компоненты. • Нано сети. Веб вещей WoТ Составной частью Интернета вещей является Веб вещей (WEB of Things, WoT), который обеспечивает взаимодействие различных интеллектуальных объектов («вещей») с использованием стандартов и механизмов Интернет, таких как унифицированный (единообразный) идентификатор ресурса URI (Uniform Resource Identifier), протокол передачи гипертекста HTTP (HyperText Transfer Protocol), стиль построения архитектуры распределенного приложения REST (Representational State Transfer) и др. Фактически WoT предусматривает реализацию концепции IoT на прикладном уровне с использованием уже существующих архитектурных решений, ориентированных на разработку web-приложений. Основные свойства WoT: 1. Использует протокол HTTP в качестве приложения, а не в качестве транспортного механизма передачи данных, как он применяется для традиционных WWW-услуг. 2. Обеспечивает синхронную работу интеллектуальных (смарт) объектов через прикладной программный интерфейс REST (также известный как RESTful API) и в целом соответствует ресурсно-ориентированной архитектуре ROA (Resource-Oriented Architecture). 3. Предоставляет асинхронный режим работы интеллектуальных объектов с использованием в значительной степени стандартных Web-технологий, таких как Atom, содержащей формат для описания ресурсов на веб-сайтах и протокол для их публикации, или Web-механизмов передачи данных, таких как модель работы веб-приложения Comet, при которой постоянное HTTP-соединение позволяет веб-серверу отправлять данные браузеру без дополнительного запроса со стороны браузера. Эти характеристики WoT обеспечивают простое взаимодействие интеллектуальных объектов через Интернет, кроме того они реализуют единообразный интерфейс для доступа и поддержки функциональности смарт-объектов. С концепцией WoT перекликается идея Семантической паутины (Semantic Web) – это направление развития Всемирной паутины WWW, целью которого является представление информации в виде, пригодном для машинной обработки. Термин «семантическая паутина» был впервые введѐн Тимом Бернерсом-Ли (изобретателем Всемирной паутины) в мае 2001 года. Концепция семантической паутины была принята и продвигается Консорциумом Всемирной паутины W3C (World Wide Web Consortium). Интернет нано - вещей Нано - технологии привели к разработке миниатюрных устройств, размеры которых варьируются от одного до нескольких сотен нано - метров. На этом уровне нано -машины состоят из нано - компонентов и представляют себя отдельные функциональные блоки, способные выполнять простые измерительные, регулирующие или управляющие операции. Координация и обмен информацией между нано - устройствами позволяют образовывать так называемые нано - сети. В случае соединения нано - устройств с существующими сетями и Интернетом возникает новая сетевая парадигма, называемая Интернетом нано - вещей. Для взаимодействия нано - устройств с существующими сетями и Интернетом требуется разработка новых сетевых архитектур. Нано -узлы - миниатюрные и простейшие нано - устройства. Позволяют выполнять простейшие расчеты, имеют ограниченную память и ограниченную дальность передачи сигналов. Примерами нано - узлов могут быть биологические нано – сенсоры на человеческом теле или внутри него или нано -устройства, встроенные в повседневные окружающие нас вещи – книги, часы, ключи и т.д. Нано - шлюзы– данные нано - устройства имеют относительно высокую производительность по сравнению с нано -узлами и выполняют функцию сбора информации от нано -узлов. Кроме того, нано -шлюзы могут контролировать поведение нано -узлов путем выполнения простых команд (вкл./выкл., режим сна, передать данные и т.д.). Нано -микро интерфейсы– устройства, собирающие информацию от нано -шлюзов, и передающие еѐ во внешние сети. Данные устройства включают в себя как нанотехнологии коммуникаций, так и традиционные технологии для передачи информации в существующие сети. Шлюз – данное устройство осуществляет контроль всей нано -сети через сеть Интернет. Например, в случае сети с сенсорами на теле человека данную функцию может выполнять мобильный телефон, транслирующий информацию о нужных показателях в медицинское учреждение. Способы взаимодействия с интернет - вещами Используют 3 способа взаимодействия с интернет - вещами: 1) прямой доступ; 2) доступ через шлюз; 3) доступ через сервер. Подведение итогов темы и ответы на вопросы студентов (5минут). Контрольные вопросы? 1. Функцией выхода в интернет оснащают? 2. Концепция передачи данных через радиосигнал появилась? 3. Протокол IRC был создан для? 5. Кто разработал пакетную коммутацию? 6. 192.178.1.9 - это…? 7. Какого уровня доменное имя “TTU.site.ru”? 8. Что такое нано – устройства? 9. Что такое нано – шлюзы? 10. Что такое нано – узлы? Тема 3. Аппаратно- техническая платформа Arduino Тип и форма: Ознакомления с новым материалом (лекция, практические занятия). Основные понятия, рассматриваемые на занятии: Arduino. Аппаратная часть. Программная часть. Arduino является аппаратно - программным средством для быстрого создания и реализации функциональности будущего проекта малыми усилиями в области электроники, автоматики, автоматизации процессов и робототехниики. Программно - аппаратный комплекс – это набор технических и программных средств используемых комплексно для выполнения одной или нескольких задач. Аппаратно-программный комплекс – техническое решение концепции алгоритма работы сложной системы, управление которой осуществляется, как правило, исполнением кода из определённого базового набора команд (системы команд). Состоит, соответственно, из двух основных частей: Аппаратная часть (англ. hardware) – устройство сбора и обработки информации, например компьютер, плата видеозахвата, биометрический детектор, калибратор т. д. Программная часть (англ. software) – специализированное программное обеспечение (как правило, написанное компанией-производителем аппаратной части), обрабатывающее и интерпретирующее данные, собранные аппаратной частью. Например: встроенное программное обеспечение, операционная система. Это платформа построена на печатной плате с интегрированной средой для написания программного обеспечения. В основе аппаратной части лежит микроконтроллер семейства ATmega и минимально необходимая для работы обвязка (рисунок 2). Arduino может принимать цифровые и аналоговые сигналы с различных устройств и имеет возможность управления различными исполнительными модулями. 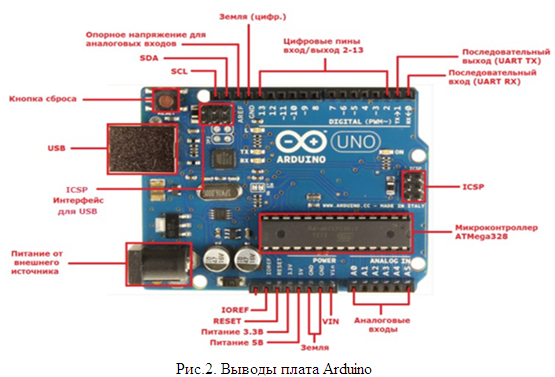 Как подключить Arduino к компьютеру? Arduino Uno и Nano подключаются к компьютеру по USB. При этом нет аппаратной поддержки USB порта, здесь применено схемное решение преобразования уровней, обычно называемое USB-to-Serial или USB-UART (rs-232). При этом в микроконтроллер прошит специальный Arduino загрузчик, который позволяет прошиваться по этим шинам. На рис.3. представлена изображение платы Аrduino с расшифровкой функции каждого вывода. 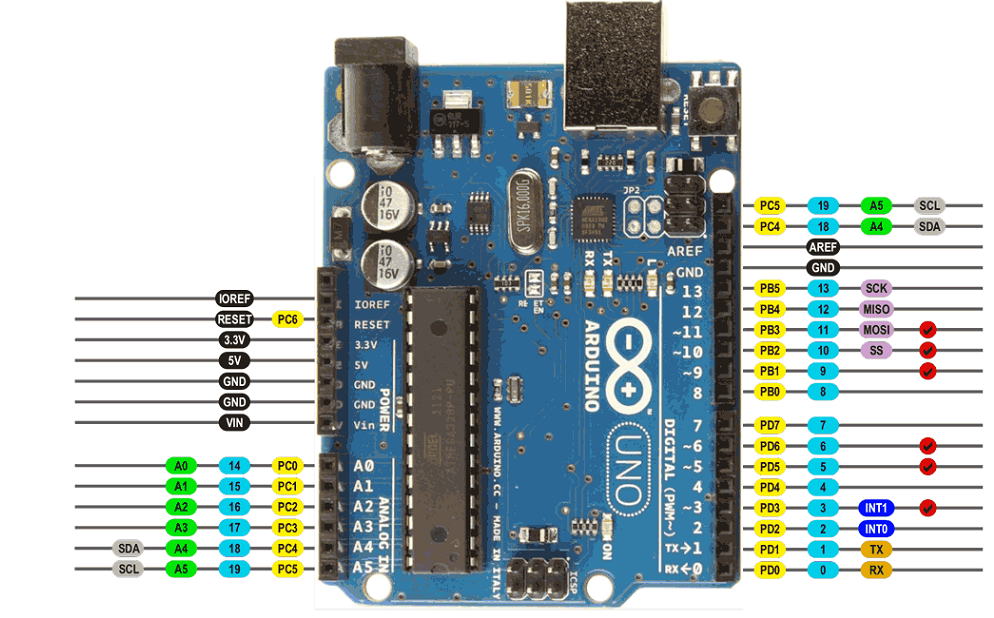 Рис.3. Изображение платы Arduino и расшифровка функций каждого вывода, Arduino UNO pinout Контрольные вопросы: 1. Что такое Arduino? 2. Программно - аппаратный комплекс ? 3. Что такое аппаратная часть ? 4. Что такое программная часть ? Все соединения можно сделать с помощью таких клемм (Dupont), они бывают как с двух сторон с гнездами, так и со штекерами, так и с одной стороны гнездо, а с другой штекер(см.рис.4).  Рис4. Клеммы соединения (Dupont) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||