ПНИК на основе марковских процессов. Гагаринские_чтения_2023_Тритенко,_Петропавловский,_Кравчук. Моделирование программы обеспечения безопасности пилотажнонавигационного и информационноизмерительного комплекса летательного аппарата
 Скачать 243.2 Kb. Скачать 243.2 Kb.
|

|
МОДЕЛИРОВАНИЕ ПРОГРАММЫ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПИЛОТАЖНО-НАВИГАЦИОННОГО И ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНОГО КОМПЛЕКСА ЛЕТАТЕЛЬНОГО АППАРАТА Рассмотрен графо-аналитический метод оптимизации периодичности контроля различного уровня и представлены результаты моделирования программы обеспечения безопасности пилотажно-навигационного и информационно-измерительного комплекса летательного аппарата с применением математического аппарата полумарковских процессов. Ключевые слова: безопасность, информационно-измерительный комплекс, летательный аппарат, полумарковский процесс, пилотажно-навигационный комплекс, эксплуатация. В настоящее время проблема создания оптимальной программы обеспечения безопасности эксплуатации пилотажно-навигационных и информационно-измерительных комплексов (далее ПНИК) летательных аппаратов стоит достаточно остро. Это вызвано тем, что ПНИК, эксплуатируемые личным составом стареют, а также снимаются с хранения и возвращаются в эксплуатацию в рамках специальной военной операции, и, следовательно, часть ПНИК находится за пределами гарантийных сроков эксплуатации. Задача синтеза оптимальной программы обеспечения безопасности эксплуатации пилотажно-навигационных и информационно-измерительных комплексов (ПОБЭ ПНИК) может быть решена только на основе аналитической модели, так как необозримо большое число подлежащих перебору вариантов делает невозможным проведение достаточно полного факторного эксперимента на базе имитационного моделирования. Из аналитических методов наиболее простым и удобным, с точки зрения возможностей анализа и синтеза ПОБЭ, не нарушающим адекватности моделей случайных процессов, при некоторых необходимых допущениях, является математический аппарат теории марковских процессов [1,2]. Целесообразность использования математического аппарата теории марковских процессов при исследовании управляемых случайных процессов обусловлена, прежде всего, их большими возможностями для учета всех существующих связей, анализа и синтеза сложного процесса, каким и является программа обеспечения безопасности пилотажно-навигационного и информационно-измерительного комплекса, по частям, а также определенной простотой и общностью моделей, то есть возможностью их развития без проведения всех исследований заново. В самом общем случае функционирование сложной системы можно представить в виде полумарковского процесса (ПМП), который представляет собой непосредственное обобщение хорошо изученных в теории вероятности цепей Маркова. К настоящему времени разработан ряд как аналитических, так и статических методов, позволяющих рассчитывать показатели безопасности отдельных элементов и сложных систем в целом, а также оценить влияние на них различных параметров ПОБЭ [3,5]. Основными признаками, предопределяющими возможность применения математического аппарата ПМП (необходимые условия) для моделирования ПНИК являются следующие характерные особенности: а) возможность представления реального процесса в виде многошагового графа состояний и переходов, в котором каждой его вершине соответствует некоторое техническое состояние системы, связанное с определенными параметрами ее качества или проводимыми эксплуатационными мероприятиями, а переходу – появление какого-либо события, приводящего в это состояние; б) поведение моделируемой системы в будущем зависит только от состояния, в котором она находится в настоящий момент и не зависит от ее предыстории; в) система может находиться только в одном из возможных состояний (множества допустимых состояний), при этом сами переходы из состояния в состояние совершаются мгновенно. Существует несколько способов задания полумарковского процесса: 1. ПМП задается матричной функцией  , элементами которой являются вероятности перехода процесса из состояния , элементами которой являются вероятности перехода процесса из состояния  в состояние в состояние  за время за время  . .2. ПМП задается матрицей  условных функций распределения и матрицей переходных вероятностей условных функций распределения и матрицей переходных вероятностей  3. ПМП задается матрицей  независимых случайных величин, характеризующих время пребывания процесса в различных состояниях до перехода в различных состояниях до перехода в другие состояния с функцией распределения независимых случайных величин, характеризующих время пребывания процесса в различных состояниях до перехода в различных состояниях до перехода в другие состояния с функцией распределения  [1]. [1].При моделировании процессов эксплуатации пилотажно-навигационных и информационно-измерительных комплексов будем рассматривать их некоторый обобщенный элемент (образец ВВТ, изделие, объект и т.п.), функционирующий по определенной программе на заданном временном интервале [0,  ]. Будем полагать, что на ПНИК через определенные промежутки времени, величина которых может колебаться от нескольких недель до нескольких месяцев, проводится контроль технического состояния (ТС). Контроль проводится по специальной программе с целью идентификации возможных состояний ПНИК и принятия решения о ее дальнейшей эксплуатации. Через промежутки времени, кратные промежуткам проведения контроля, проводится более глубокое техническое обслуживание, которое включает в себя не только контроль, но и дополнительные мероприятия, выполнение которых повышает безопасность эксплуатации ПНИК. Предпосылки к происшествию обнаруженные в процессе контроля или технического обслуживания анализируются и устраняются. При возникновении происшествий (аварий) проводятся мероприятия по локализации последствий происшествия, минимизации ущерба и восстановления готовности ПНИК к применению по назначению (ГПН) [4]. ]. Будем полагать, что на ПНИК через определенные промежутки времени, величина которых может колебаться от нескольких недель до нескольких месяцев, проводится контроль технического состояния (ТС). Контроль проводится по специальной программе с целью идентификации возможных состояний ПНИК и принятия решения о ее дальнейшей эксплуатации. Через промежутки времени, кратные промежуткам проведения контроля, проводится более глубокое техническое обслуживание, которое включает в себя не только контроль, но и дополнительные мероприятия, выполнение которых повышает безопасность эксплуатации ПНИК. Предпосылки к происшествию обнаруженные в процессе контроля или технического обслуживания анализируются и устраняются. При возникновении происшествий (аварий) проводятся мероприятия по локализации последствий происшествия, минимизации ущерба и восстановления готовности ПНИК к применению по назначению (ГПН) [4].Первым этапом решения задачи оптимизации периодичности контроля пилотажно-навигационной и информационно-измерительного комплекса на основе полумарковских процессов принятия решений является построение графа состояний и переходов ПНИК при реализации ПОБЭ (Рис.1.). При этом при построении следует учитывать следующие состояния (Табл.1.), а также возможные переходы из состояния в состояние и их физический смысл (Табл.2). 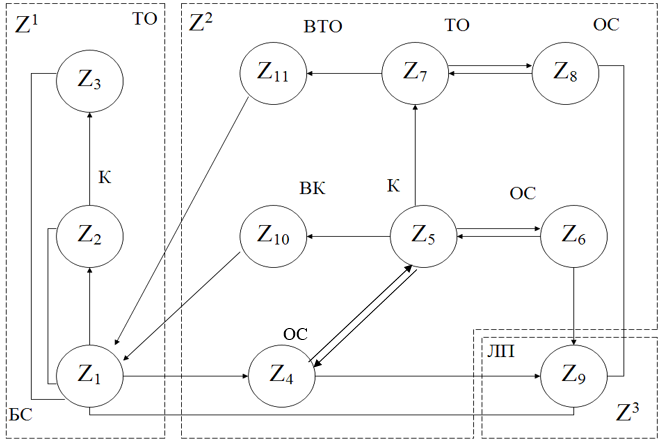 Рис. 1. Граф состояний и переходов ПНИК при реализации ПОБЭ Таблица 1.
Таблица 2.
Таким образом, в результате словесного описания процесса функционирования пилотажно-навигационного и информационно-измерительного комплексов летательного аппарата, построена его графическая модель, учитывающая установленную программу эксплуатации, определены возможные ее состояния и переходы в результате управляющих воздействий и влияния внешней среды, что позволяет разработать аналитическую модель ПОБЭ ПНИК. Модель функционирования сложной технической системы, которой является ПНИК ЛА, реализующей ПОБЭ может быть представлена в виде графа (Рис. 1). При составлении модели функционирования СТС примем следующие допущения: 1. Моделируемая система в любой момент времени  может находиться только в одном из i-х состояний представленного множества может находиться только в одном из i-х состояний представленного множества  . .2. В интервале времени  предполагается возникновение не более одного опасного отказа. Появление двух и более опасных отказов является маловероятным событием, что справедливо для высоконадежных систем. предполагается возникновение не более одного опасного отказа. Появление двух и более опасных отказов является маловероятным событием, что справедливо для высоконадежных систем.3. Периодичность контроля и технического обслуживания регулярна и, соответственно, равна -  . .4. Продолжительность контроля и технического обслуживания без устранения предпосылок к происшествиям, соответственно, равна -  . .5. Техническое обслуживание СТС, как более высокий по уровню иерархии технологический эксплуатационный процесс (ТЭП), включает в себя и операции контроля технического состояния, т.е.  , где А – множество операций ТЭП. , где А – множество операций ТЭП.6. Продолжительность ТЭП связанных с устранением предпосылок к происшествиям (восстановлением безопасного состояния) имеет распределение Эрланга с параметром  . . 7. В процессе контроля и технического обслуживания состояние СТС контролируется не в полном объеме, при этом возможны ошибки первого и второго рода. контроля или технического обслуживания устраняются немедленно и в полном объеме. 9. В процессе контроля и всех видов технического обслуживания сложная система находится в безопасном состоянии. 10. Время перехода из опасного состояния в состояние происшествия подчинено экспоненциальному закону распределения с параметром  , где , где  - случайный интервал времени от момента возникновения ПП к моменту развития происшествия по вине данной предпосылки. - случайный интервал времени от момента возникновения ПП к моменту развития происшествия по вине данной предпосылки. 11. В данной модели функционирования СТС учитываются только события, связанные с появлением опасных отказов. Если существует необходимость в учете других видов предпосылок к происшествию, то данная модель должна быть преобразована соответствующим образом. Формализация модели позволила получить следующие зависимости и значения: а) для стационарных вероятностей вложенной марковской цепи -  ; б) средние времена пребывания в состоянии - ; б) средние времена пребывания в состоянии -  ; в) переходные вероятности - ; в) переходные вероятности -  ; г) безусловные математические ожидания нахождения в состоянии - ; г) безусловные математические ожидания нахождения в состоянии -  ; д) средние времена до первого попадания СТС из состояния Zi в Zj - ; д) средние времена до первого попадания СТС из состояния Zi в Zj -  [3]. [3].С помощью этих зависимостей и значений запишем некоторые аналитические выражения для расчета характеристик (показателей) моделируемой ПОБЭ для образца РВО, являющегося СТС. 1. Показатель готовности образца РВО, отражающий основную цель ПОБЭ – обеспечение готовности к безопасному применению по назначению.  , (1) , (1)где  - периодичность проведения контроля; - периодичность проведения контроля; - интенсивность возникновения предпосылок к происшествию. - интенсивность возникновения предпосылок к происшествию.По своему физическому смыслу представленный показатель готовности КГ можно интерпретировать по-разному: во-первых, это доля времени по отношению к циклу эксплуатации, в течении которого образец РВО находится в готовности к безопасному применению по назначению; во-вторых, это вероятность нахождения образца РВО в случайный момент времени в готовности к безопасному применению по назначению; в-третьих, это вероятность того, что в случайный момент времени техническое состояние образец РВО является безопасным и образец готов к применению по назначению. 2. Вероятность нахождения образца РВО в случайный момент времени в состоянии устранения (ликвидации, локализации) последствий происшествия  , (2) , (2)где  - параметр распределения Эрланга, характеризующий трудоемкость работ по локализации и (или) ликвидации последствий происшествия. - параметр распределения Эрланга, характеризующий трудоемкость работ по локализации и (или) ликвидации последствий происшествия.То есть Р9 – доля времени от планируемого периода эксплуатации, в течение которого система будет находиться в состоянии устранения последствий происшествий (аварий, катастроф). 3. Вероятность нахождения образца РВО в опасном состоянии (состоянии с предпосылкой к происшествию):   (3)   где    Для определения стационарных вероятностей состояний ВМЦ может быть использована система из n уравнений, которые записываются в соответствии с формулой полной вероятности Для определения стационарных вероятностей состояний ВМЦ может быть использована система из n уравнений, которые записываются в соответствии с формулой полной вероятности в виде  . (4) . (4)Следовательно, для графа состояний СТС (рис. 1), система уравнений имеет вид  (5)  В наибольшей степени влияние на эффективность функционирования оказывают следующие параметры: - периодичность проведения контроля; - периодичность проведения технического обслуживания; - интенсивность возникновения предпосылок к происшествию; - периодичность проведения технического обслуживания; - интенсивность возникновения предпосылок к происшествию; - вероятность обнаружения предпосылок к происшествию в процессе контроля (относительная полнота контроля). - вероятность обнаружения предпосылок к происшествию в процессе контроля (относительная полнота контроля).При моделировании были приняты следующие исходные данные: периодичность проведения технического обслуживания - 1 год (8760 часов);время, необходимое для проведения контроля на техническом обслуживании – 2, 7 – 4 суток (96 часов);время, необходимое для устранения предпосылки к происшествию, выявленное в ходе технического обслуживания – 11- 5 суток (120 часов);время, необходимое для осуществление контроля – 5 – 1 сутки (24 часа);время, необходимое для устранения предпосылки к происшествию, выявленной при проведении контроля – 10 – 3 суток (72 часа);время, необходимое для локализации и (или) ликвидации последствий происшествия – 9 – 10 суток (240 часов);полнота и достоверность выявления предпосылки к происшествию в процессе технического обслуживания -  - 0,95; - 0,95;интенсивность возникновения предпосылки к происшествию бралась  , ,  , , ; ;полнота и достоверность выявления предпосылки к происшествию в процессе контроля: для рисунков а) - 0,15, для рисунков б) - - 0,90.На рис. 2 а,б; 3 а,б; 4 а,б представлены графики для Р1, Рос, Р9. а)   Р1 τмк     б)  Р1 τмк  Рис. 2. График зависимости Р1 от τмк а)  Рос τмк  б) Рос τмк  Рис. 3. График зависимости Рос от τмк а) б) τмк Р9  Рис. 4. График зависимости Р9 от τмк Анализ графиков показывает, что изменение вероятностей нахождения в одном из состояний зависит: 1) от интенсивности возникновения предпосылки к происшествию – чем она меньше, тем выше вероятность нахождения системы в безопасном и готовом к применению по назначению состоянии; 2) от полноты и достоверности выявления предпосылки к происшествию в процессе контроля – чем она выше, тем реже нам необходимо проводить контроль (диагностирование) [4]. Для каждой из интенсивностей возникновения предпосылки к происшествию были найдены свои оптимальные τ*мк: 1) - τ1*мк= 72 часа;2) - τ2*мк= 240 часов;3) - τ3*мк= 960 часов.Подставив данные значения в модель были получены графики зависимости вероятности нахождения системы в безопасном и готовом к применению по назначению состоянии от τмто. Из анализа данных графиков видно, что после достижения определенного значения периодичности проведения технического обслуживания Р1 не повышается, а наоборот падает. Максимальные значения соответствуют устоявшейся практике войск – для мы имеем значение  . Увеличение периодичности τмто может быть также достигнуто за счет увеличения относительной глубины периодического контроля , когда большая часть предпосылок к происшествию выявляется при более частом и глубоком контроле. . Увеличение периодичности τмто может быть также достигнуто за счет увеличения относительной глубины периодического контроля , когда большая часть предпосылок к происшествию выявляется при более частом и глубоком контроле.На рис. 6 проведен график зависимости нахождения образца РВО в безопасном и готовом к применению по назначению состоянии при τ*мк для значений ω, указанных выше. Причем τмто бралось равным 1,2,3 годам, а достоверность при проведении контроля изменялась в пределах 0,4 - 0,9. Полученные графики показывают, что при данной высокой эффективности контроля необходимость контроля в ходе технического обслуживания существует только для особо ответственных систем. а) Р1 τмто  б) Р1 τмто  в) Р1 τмто  Рис.5. График изменения Р1 от τмто 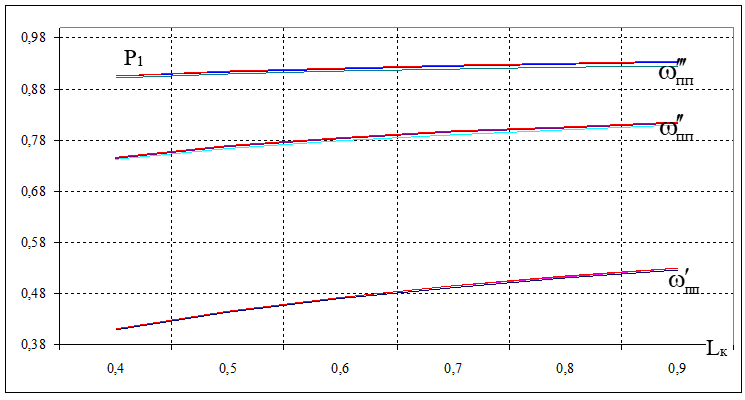 Рис.6. График зависимости Р1 от L и τмто Полученные графики показывают, что при данной высокой эффективности контроля необходимость контроля в ходе технического обслуживания существует только для особо ответственных систем. Это связанно с тем, что эффективность по отношению к контролю мала, а продолжительность относительно времени нахождения в безопасном и готовом к применению по назначению состоянии – велика. Проведенное моделирование показывает, что модель функционирования сложной технической системы, на примере образца пилотажно-навигационного и информационно-измерительного комплексов летательного аппарата, способна оказать помощь в вопросах проведения контроля. Литература 1. Блаженков, В.В. Введение в прикладную теорию полумарковских моделей эксплуатации сложных систем: Учебное пособие. – М.: МО СССР, 1979. – 70 с. 2. Волков, Л.И. Безопасность и надежность систем. – М.: Изд-во СИП РИА, 2003.-268 с. 3. Майструк, А.В. Прогнозирование надежности и безопасности сложных технических систем при композиции законов распределения параметров структурных элементов / А. В. Майструк // Электронный сетевой политематический журнал "Научные труды КубГТУ". – 2019. – № 3. – С. 643-656. – EDN XLSWHA. 4. Граф-модель оптимизации периодичности контроля сложных технических систем менеджментом предприятия на этапе реализации проекта / А. В. Майструк, Е. Ю. Лушпа, Ю. Е. Разумова // Технология, экономика и организация производства технических систем: Межвузовский сборник научных трудов / под ред. О. В. Таратынова, Е.А. Резчикова. – Москва: Московский государственный индустриальный университет, 2012. – С. 146-153. – EDN TYHBXP. 5. Майн Х., Осаки С. Марковские процессы принятия решений. – М: Наука, 1977. – 176 с. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||