Мурманский государственный технический университет
 Скачать 45.08 Kb. Скачать 45.08 Kb.
|

МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное бюджетное образовательное учреждение высшего образования"Мурманский государственный технический университет" Кафедраавтоматикии вычислительнойтехники Составление принципиальных и функциональных схемсистем автоматического регулирования Методическиеуказанияквыполнениюконтрольнойработы подисциплине«Основытеорииуправления»длянаправленияподготовки Информатикаивычислительнаятехника(уровеньбакалавриата) Мурманск 2019 Составители: Селяков Илья Юрьевич, доцент кафедры автоматики и вычислительной техники МГТУ; Столянов Александр Вячеславович, старший преподаватель той же кафедры. Методические указания рассмотрены и одобрены кафедрой автоматики и вычислительной техники 2019 г., протокол № Рецензент – Кайченов Александр Вячеславович, канд. техн. наук, доцент кафедры автоматики и вычислительной техники Мурманского государственного технического университета Электронноеизданиеподготовленовавторскойредакции. Мурманский государственный технический университет 183010, Мурманск, ул. Спортивная д. 13 тел. (8152) 403500 Уч.-изд. л. Заказ © Мурманский государственный технический университет, 2019 г. Содержание
Теоретические сведения Алгоритм функционирования – совокупность предписаний, направленных на качественное выполнение технического процесса в каком – либо устройстве или системе. В общем случае алгоритм функционирования является составным и реализует задачи управления, контроля, диагностирования, защиты. Алгоритм управления – это совокупность предписаний, определяющих характер воздействия на процесс с целью выполнения им заданного алгоритма функционирования. Управление – это процесс осуществления воздействий, соответствующих алгоритму управления. Автоматическое управление – это управление, осуществляемое без непосредственного участия человека (за исключением простейших операций включения). Автоматическое регулирование – разновидность автоматического управления. Оно обеспечивает поддержание постоянства некоторой регулируемой величины, характеризующей, технологический процесс, или же изменение еѐ по заданному закону, осуществляемое посредством изменения состояния регулируемого объекта. Автоматическая система управления (регулирования) АСУ (АСР, САР) система, реализующая автоматическое управление (регулирование). С целью формализации знаний АСР представляется в виде схем: принципиальных; функциональных; структурных. Функциональную схему системы автоматического регулирования, как правило, можно представить следующим образом (рисунок 1).   X(t) X(t)t) F(t)  Y(t) Y(t)  Рисунок 1 – Функциональная схема АСР Каждому элементу принципиальной схемы соответствует блок, имеющий вход и выход. Вход и выход представлены обобщѐнными физическими величинами. Основные обозначения на функциональной схеме: ЗУ – задающее устройство; ОУ – объект управления, устройство или их совокупность, осуществляющая технический процесс в соответствии с алгоритмом функционирования, технологический процесс или их набор, подчинѐнный одной цели управления (судно, паровой котѐл, дизель, вспомогательные механизмы и так далее); РО – регулирующий орган, при изменении положения или состояния которого показатели технологического процесса будут изменяться в заданных пределах (обмотки возбуждения электродвигателей и генераторов, руль судна, рейка топливных насосов дизеля, вентили, клапаны, заслонки систем трубопроводов). ИМ – исполнительный механизм - приводит к изменению положения регулирующего органа ОУ. РЕГ – регулятор - комплекс устройств, присоединяемых к регулируемому объекту и обеспечивающих или автоматическое поддержание заданного значения его регулируемой величины, или автоматическое изменение ее по определенному закону. ЧЭ – чувствительный элемент, датчик - предназначаются для того, чтобы реагировать на отклонение регулируемого параметра в объекте регулирования от заданного значения, преобразовывать геометрические, физические или химические измеренные величины в электрические, пневматические или гидравлические и передавать их последующим органам регулирования и управления в удобной форме. Любое управление состоит из трѐх частей: сбор информации об ОУ посредством датчиков, установленных на нѐм; обработка собранной информации по заданному алгоритму управления в РЕГ; выдача управляющего воздействия на ОУ посредством исполнительных механизмов и регулирующих органов. К элементам АСР прикладываются различные воздействия – внутренние и внешние. К внутренним относят управление U(t), внешние же поступают из вне и делятся на задающие и возмущающие. Задающие воздействие прикладывается к АСР и определяет цель еѐ работы (заданная частота вращения для двигателей, заданная температура для холодильных установок и так далее). Обычно обозначается G(t). Возмущающее воздействие, как правило, препятствует достижению заданной цели в АСР. Например, расход пара для котла, момент сопротивления на валу дизеля. Обозначается F(t). Выходной параметр ОУ, определяющий цель АСР, называется регулируемым и обозначается Y(t). Одна из основополагающих формул автоматики: G(t) – Y(t) = E(t), (1) где: E(t) - ошибка регулирования или рассогласование – разность между задающим воздействием и регулируемым параметром. На элемент сравнения (рисунок 2) поступает два сигнала – заданное значение и выходной сигнал ОУ. Последний называется сигналом обратной связи (ОС). 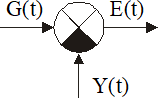 Рисунок 2 – Элемент сравнения САР В зависимости от знака (рисунок 3), ОС могут быть положительными или отрицательными.  Рисунок 3 – Обратные связи АСР Структурная схема отличается от функциональной схемы тем, что внутри блоков содержатся передаточные функции, характеризующие динамические свойства соответствующего элемента. Классификациясистемавтоматическогоуправления По характеру цели регулирования. Стабилизирующие, когда значение выходного параметра Y(t) поддерживается постоянным. В этих системах не изменяется с течением времени и задающее воздействие X(t). Действие внешних возмущений (помех) на систему благодаря постоянному задающему воздействию (стабилизации) резко уменьшается или полностью устраняется. Примерами таких систем являются стабилизаторы напряжения, температуры, скорости, углового перемещения. С программным регулированием, когда изменение выходного параметра Y(t) осуществляется по определенному закону в соответствии с изменением задающего воздействия X(t). Примерами таких систем могут быть станки с программным управлением и т. д. G(t) является некоторой, иногда достаточно сложной, жѐстко заданной последовательностью величин. АСР программного типа наиболее распространены в системах ДАУ (например, пуск-останов по программе). Следящие системы, когда изменение выходного параметра Y(t) происходит по заранее неизвестному закону изменения задающего воздействия X(t). Во время работы системы регулируемая величина Y(t) должна изменяться в полном соответствии с задающим воздействием, т. е. она следит за ним. К таким системам относятся системы автоматического сопровождения цели (например, телескоп следит за движением небесного тела), системы синхронного следящего электропривода (вал электродвигателя следит за положением задающего вала), системы автоподстройки частоты (в радиоприемнике осуществляется слежение за частотой входного сигнала). По наличию ОС: разомкнутые; замкнутые. Разомкнутая CAP предназначена для автоматического выполнения операций, которые задаются внешними источниками воздействий на входе этой системы, при этом процесс управления не зависит от конечного результата. Замкнутая система автоматического регулирования предназначена для автоматического выполнения операций с зависимостью процесса управления от конечного результата. В этой системе предусмотрена цепь, соединяющая (замыкающая) выход системы с устройством, где происходит сравнение вы- ходного откорректированного сигнала системы — действительного значения управляемой величины с заданной. Благодаря этому сравнению в системе автоматически вырабатывается управляющее воздействие, изменяющее (поддерживающее) значение контролируемого параметра. По принципу построения. По отклонению, регулируемый параметр Y(t) сравнивается с заданным значением G(t). На основании разности этих величин E(t)=Y(t)-G(t) вырабатывается регулирующее воздействие U(t). Величина U(t), называемая отклонением или ошибкой системы регулирования, не должна превышать определенного значения. Отличительной чертой таких систем является их универсальность. Это качество проявляется в том, что любое отклонение регулируемого параметра от его заданного значения вызывает появление регулирующего воздействия независимо от числа, вида и места приложения возмущений. Одним регулирующим воздействием часто достигается удовлетворительная компенсация нескольких возмущений. Это особенно важно, когда объект регулирования подвержен воздействию многочисленных возмущений, влияние которых на регулируемый параметр невозможно предусмотреть. Однако, при управлении сложными инерционными объектами со значительным временем запаздывания, когда регулирующее воздействие не может вызвать мгновенного изменения регулируемого параметра, возникающее отклонение может иметь недопустимо большое значение. Достоинства: простота реализации закона управления (изменяется только регулируемый параметр); не критичность системы к изменению параметров еѐ элементов (коэффициенты усиления элементов). Недостатки: недостаточное быстродействие. По возмущению, сущность принципа регулирования по возмущению состоит в том, что из различных возмущений, действующих в системе, выбирается одно, главное, на которое и реагирует АСР. В этом случае компенсируется влияние на регулируемый параметр только основного возмущающего воздействия и регулирующее воздействие вырабатывается в системе в зависимости от результатов измерения основного возмущения, действующего на объект. Этот принцип часто называют регулирование по нагрузке, так как при поддержании, например, постоянного напряжения генератора регулирующее воздействие зависит от изменения нагрузки. Достоинство этого принципа регулирования заключается в том, что влияние возмущающего воздействия может быть устранено до того, как произойдет отклонение регулируемого параметра, так как регулятор действует на объект без запаздывания по отношению к возникшему возмущению. Комбинированное регулирование. Каждый из рассмотренных принципов регулирования – по отклонению и по возмущению – имеет свои недостатки и достоинства. Поэтому для создания автоматических систем высокой точности обычно используют принцип комбинированного регулирования, сочетающий в себе оба принципа регулирования. В комбинированной системе воздействие по нагрузке обеспечивает немедленное возникновение регулирующего воздействия в соответствии с изменением нагрузки, а воздействие по отклонению используется для устранения погрешностей, возникающих в результате неточности регулирования по нагрузке. По виду используемой энергии: электрические, гидравлические, пневматические. Некоторые системы используют комбинации этих видов энергии. По характеру обработки информации и выдачи управляющих воздействий: а) непрерывные (аналоговые), характеризуются наличием аналоговых сигналов на входе и выходе регулятора, а сам регулятор построен на аналоговых элементах. б) дискретные – системы, в которых хотя бы одна из координат подвергается квантованию (по времени, по уровню, по времени и по уровню). Перечень заданийВарианты контрольной работы «Составление принципиальных и функциональных схем систем автоматического регулирования»: САР давления в паровом трубопроводе Рис. В.10. САР уровня жидкости. Рис. В.11. САР давления пара. Рис.6.9. САР давления воздуха. Рис.6.13. САР температуры топлива. Рис.6.15. САР давления в уравнительном коллекторе. Рис.9.2. САР уровня в конденсаторе. Рис.13.2. САР частоты вращения ГТУ. Рис.23.9. Терморегулятор РТНД. Рис.27.8. САР частоты вращения. Рис.52.2. РисункинаходятсявкнигеНелепинаР.А.―Автоматизациясудовых энергетических установок‖. Для заданного преподавателем варианта контрольной работы необходимо выполнить следующие задания и представить результат в печатном виде: Составить принципиальную схему системы автоматического регулирования, назначение которой определено вариантом. Описать принцип действия схемы. Составить развернутую функциональную схему системы с обозначением всех элементов, внутренних и внешних воздействий. Дать полную классификацию системы. Защита производится собеседованием по списку вопросов для контроля знаний и материалам контрольной работы. Список вопросов для контроля знанийДайте определение следующим понятиям: алгоритм функционирования, алгоритм управления, управление. Дайте определение следующим понятиям: автоматическое управление, автоматическое регулирование, АСР.
выдачи управляющих воздействий. Список рекомендуемой литературыПервозванский, А. А. Курс теории автоматического управления: учеб. пособие для вузов / А. А. Первозванский. - Изд. 2-е, стер. - Санкт- Петербург [и др.]: Лань, 2010. - 615 с.: ил. Бесекерский, В. А. Теория систем автоматического управления / В. А. Бесекерский, Е. П. Попов. - 4-е изд., перераб. и доп. - Санкт-Петербург: Профессия, 2003. - 752 с. Маслов, А.А. Исследование систем автоматического регулирования на базе технических и программных средств автоматизации «ОВЕН»: Уч. пособие; Маслов А.А., Кайченов А.В.; Мурманск, МГТУ; 2013. – 42 с. Комаров, Г.А. Автоматизированные системы судовых энергетических установок : учеб. пособие. Ч. 1 / Г. А. Комаров, А. А. Маслов; Ком. Рос. Федерации по рыболовству ; МГАРФ. - Мурманск : МГАРФ, 1996. - 136 с. Автоматизация судовых энергетических установок: Справ. пособие / под ред. Р.А. Нелепина. – Л.: Судостроение, 1975. – 536 с.  Приложение А – Пример оформления контрольной работы Приложение А – Пример оформления контрольной работы МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «МУРМАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» КафедраАиВТ Контрольная работа по дисциплине: «Основы автоматики и теории управления техническими системами» Тема: «Составление принципиальных и функциональных схем систем автоматического регулирования» Вариант 2 Выполнил: обучающийся 3 курса, группы ЭСЭОс19о Фамилия И.О. Проверил: старший преподаватель кафедры А и ВТ Столянов А. В. Мурманск 2021
 

| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||