Лекции Гидравлические и пневматические машины. Общая характеристика привода Структурная схема гидропривода
 Скачать 1.55 Mb. Скачать 1.55 Mb.
|

|
11.3. Течение воздуха Инженерные расчеты пневмосистем сводятся к определению скоростей и расходов воздуха при наполнении и опорожнении резервуаров (рабочих камер двигателей), а также с его течением по трубопроводам через местные сопротивления. Вследствие сжимаемости воздуха эти расчеты значительно сложнее, чем расчеты гидравлических систем, и в полной мере выполняются только для особо ответственных случаев. Полное описание процессов течения воздуха можно найти в специальных курсах газодинамики. Основные закономерности течения воздуха (газа) такие же, как и для жидкостей, т.е. имеют место ламинарный и турбулентный режимы течения, установившийся и неустановившийся характер течения, равномерное и неравномерное течение из-за переменного сечения трубопровода и все остальные кинематические и динамические характеристики потоков. Вследствие низкой вязкости воздуха и относительно больших скоростей режим течения в большинстве случаев турбулентный. Для промышленных пневмоприводов достаточно знать закономерности установившегося характера течения воздуха. В зависимости от интенсивности теплообмена с окружающей средой расчеты параметров воздуха выполняются с учетом вида термодинамического процесса, который может быть от изотермического (с полным теплообменом и выполнением условия Т = const) до адиабатического (без теплообмена). При больших скоростях исполнительных механизмов и течении газа через сопротивления процесс сжатия считается адиабатическим с показателем адиабаты k = 1,4. В практических расчетах показатель адиабаты заменяют на показатель политропы (обычно принимают n = 1,3…1,35), что позволяет учесть потери, обусловленные трением воздуха, и возможный теплообмен. В реальных условиях неизбежно происходит некоторый теплообмен между воздухом и деталями системы и имеет место так называемое политропное изменение состояния воздуха. Весь диапазон реальных процессов описывается уравнениями этого состояния pVn = const где n - показатель политропы, изменяющийся в пределах от n = 1 (изотермический процесс) до n = 1,4 (адиабатический процесс). В основу расчетов течения воздуха положено известное уравнение Бернулли движения идеального газа Слагаемые уравнения выражаются в единицах давления, поэтому их часто называют "давлениями": z - весовое давление; p - статическое давление; - скоростное или динамическое давление. На практике часто весовым давлением пренебрегают и уравнение Бернулли принимает следующий вид Сумму статического и динамического давлений называют полным давлением P0. Таким образом, получим При расчете газовых систем необходимо иметь в виду два принципиальных отличия от расчета гидросистем. Первое отличие заключается в том, что определяется не объемный расход воздуха, а массовый. Это позволяет унифицировать и сравнивать параметры различных элементов пневмосистем по стандартному воздуху (ρ = 1,25 кг/ м3, υ = 14,9 м2/с при p = 101,3 кПа и t = 20°C). В этом случае уравнение расходов записывается в виде Qм1 = Qм2 или υ1V1S1 = υ2V2S2 Второе отличие заключается в том, что при сверхзвуковых скоростях течения воздуха изменяется характер зависимости расхода от перепада давлений на сопротивлении. В связи с этим существуют понятия подкритического и надкритического режимов течения воздуха. Смысл этих терминов поясняется ниже. Рассмотри истечение газа из резервуара через небольшое отверстие при поддержании в резервуаре постоянного давления (рис.11.1). Будем считать, что размеры резервуара настолько велики по сравнению с размерами выходного отверстия, что можно полностью пренебрегать скоростью движения газа внутри резервуара, и, следовательно, давление, температура и плотность газа внутри резервуара будут иметь значения p0, ρ0 и T0. 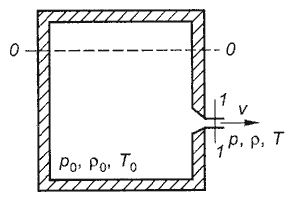 Рис.11.1. Истечение газа из отверстия в тонкой стенке Скорость истечения газа можно определять по формуле для истечения несжимаемой жидкости, т.е. Массовый расход газа, вытекающего через отверстие, определяем по формуле 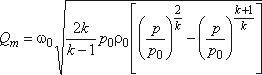 где ω0 - площадь сечения отверстия. Отношение p/p0 называется степенью расширения газа. Анализ формулы (11.7) показывает, что выражение, стоящее под корнем в квадратных скобках, обращается в ноль при p/p0 = 1 и p/ p0 = 0. Это означает, что при некотором значении отношения давлений массовый расход достигает максимума Qmax. График зависимости массового расхода газа от отношения давлений p/p0 показан на рис.11.2. 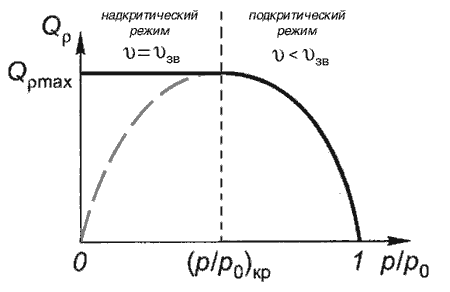 Рис.11.2. Зависимость массового расхода газа от отношения давлений Отношение давлений p/p0, при котором массовый расход достигает максимального значения, называется критическим. Можно показать, что критическое отношение давлений равно Как видно из графика, показанного на рис.11.2, при уменьшении p/p0 по сравнению с критическим расход должен уменьшаться (пунктирная линия) и при p/p0 = 0 значение расхода должно быть равно нулю (Qm = 0). Однако в действительности это не происходит. В действительности при заданных параметрах p0, ρ0 и T0 расход и скорость истечения будут расти с уменьшением давления вне резервуара p до тех пор, пока это давление меньше критического. При достижении давлением p критического значения расход становится максимальным, а скорость истечения достигает критического значения, равного местной скорости звука. Критическая скорость определяется известной формулой После того, как на выходе из отверстия скорость достигла скорости звука, дальнейшее уменьшение противодавления p не может привести к увеличению скорости истечения, так как, согласно теории распространения малых возмущений, внутренний объем резервуара станет недоступен для внешних возмущений: он будет "заперт" потоком со звуковой скоростью. Все внешние малые возмущения не могут проникнуть в резервуар, так как им будет препятствовать поток, имеющий ту же скорость, что и скорость распространения возмущений. При этом расход не будет меняться, оставаясь максимальным, а кривая расхода примет вид горизонтальной линии. Таким образом, существует две зоны (области) течения: подкритический режим, при котором надкритический режим, при котором В надкритической зоне имеет место максимальная скорость и расход, соответствующие критическому расширению газа. Исходя из этого при определении расходов воздуха предварительно определяют по перепаду давления режим истечения (зону), а затем расход. Потери на трение воздуха учитывают коэффициентом расхода μ, который с достаточной точностью можно вычислить по формулам для несжимаемой жидкости (μ = 0,1...0,6). Окончательно скорость и максимальный массовый расход в подкритической зоне, с учетом сжатия струи определятся по формулам 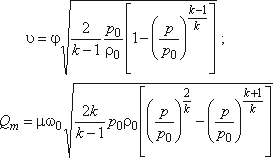 11.4. Подготовка сжатого воздуха В промышленности используются различные конструкции машин для подачи воздуха под общим названием воздуходувки. При создании избыточного давления до 0,015 МПа они называются вентиляторами, а при давлении свыше 0,115 МПа - компрессорами. Вентиляторы относятся к лопастным машинам динамического действия и кроме своего основного назначения - проветривания - применяются в пневмотранспортных системах и низконапорных системах пневмоавтоматики. В пневмоприводах источником энергии служат компрессоры с рабочим давлением в диапазоне 0,4…1,0 МПа. Они могут быть объемного (чаще поршневые) или динамического (лопастные) действия. Теория работы компрессоров изучается в специальных дисциплинах. По виду источника и способу доставки пневмоэнергии различают магистральный, компрессорный и аккумуляторный пневмопривод. Магистральный пневмопривод характеризуется разветвленной сетью стационарных пневмолиний, соединяющих компрессорную станцию с цеховыми, участковыми потребителями в пределах одного или нескольких предприятий. Компрессорная станция оборудуется несколькими компрессорными линиями, обеспечивающими гарантированное снабжение потребителей сжатого воздуха с учетом возможной неравномерной работы последних. Это достигается установкой промежуточных накопителей пневмоэнергии (ресиверов) как на самой станции, так и на участках. Пневмолинии обычно резервируются, чем обеспечивается удобство их обслуживания и ремонта. Типовой комплект устройств, входящих в систему подготовки воздуха, показан на принципиальной схеме компрессорной станции (рис.11.3). 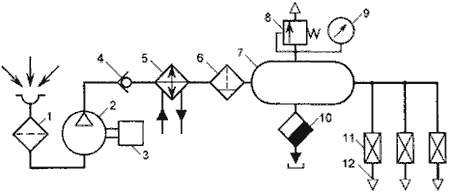 Рис.11.3. Принципиальная схема компрессорной станции Компрессор 2 с приводным двигателем 3 всасывает воздух из атмосферы через заборный фильтр 1 и нагнетает в ресивер 7 через обратный клапан 4, охладитель 5 и фильтр-влагоотделитель 6. В результате охлаждения воздуха водяным охладителем 5 происходит конденсация 70-80 % содержащейся в воздухе влаги, улавливаемой фильтром- влагоотделителем и со 100-процентной относительной влажностью воздух поступает в ресивер 7, который аккумулирует пневмоэнергию и сглаживает пульсацию давления. В нем происходит дальнейшее охлаждение воздуха и конденсация некоторого количества влаги, которая по мере накопления удаляется вместе с механическими примесями через вентиль 10. Ресивер обязательно оборудуется одним или несколькими предохранительными клапанами 8 и манометром 9. Из ресивера воздух отводится к пневмолиниям 12 через краны 11. Обратный клапан 4 исключает возможность резкого падения давления в пневмосети при отключении компрессора. Компрессорный пневмопривод отличается от вышеописанного магистрального своей мобильностью и ограниченностью числа одновременно работающих потребителей. Передвижные компрессоры наиболее широко используются при выполнении различных видов строительных и ремонтных работ. По комплекту устройств, входящих в систему подготовки воздуха, он практически не отличается от вышеописанной компрессорной станции (водяной охладитель заменяется на воздушный). Подача воздуха к потребителям осуществляется через резинотканевые рукава. Аккумуляторный пневмопривод ввиду ограниченного запаса сжатого воздуха в промышленности применяется редко, но широко используется в автономных системах управления механизмов с заданным временем действия. На рис.11.4 показаны несколько примеров аккумуляторного питания пневмосистем. Для бесперебойной подачи жидкости в гидросистему или топлива в двигатели внутреннего сгорания аппаратов с переменной ориентацией в пространстве применяется наддув бака с жидкостью (рис.11.4, а) от пневмобаллона 1. Вытеснение жидкости из бака 5, разделенного мембраной на две части, обеспечивается постоянным давлением воздуха, зависящим от настройки редукционного клапана 3 при включении электровентиля 2. Предельное давление ограничивается клапаном 4. Система ориентации летательного аппарата (рис.11.4, б) состоит из управляющих реактивных пневмодвигателей 4, питающихся от шарового пневмобаллона 1 через редукционный клапан 2 и электровентили 3. 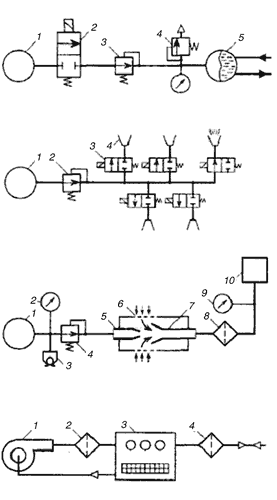 Рис.11.4. Принципиальные схемы аккумуляторного питания пневмосистем (а, б, в) и замкнутой пневмосистемы (г) Для питания систем промышленной пневмоавтоматики часто используется не только средний (нормальный) диапазон давления воздуха (0,118…0,175 МПа), а и низкий диапазон (0,0012…0,005 МПа). Это позволяет уменьшить расход сжатого воздуха, увеличить проходное сечение элементов и, следовательно, снизить вероятность засорения дросселирующих устройств, а в некоторых случаях получить ламинарный режим течения воздуха с линейной зависимостью Q = f(Δp), что весьма важно в устройствах пневмоавтоматики. При наличии источника высокого давления можно обеспечить питание пневмосистемы низкого давления с большим расходом воздуха при помощи эжектора (рис.11.4, в). От пневмобаллона высокого давления 1, оборудованного редукционным клапаном 4, манометром 2 и зарядным клапаном 3 воздух поступает на питающее сопло 5 эжектора. При этом внутри корпуса эжектора создается пониженное давление, и из окружающей среды через фильтр 6 подсасывается воздух, который поступает в приемное сопло 7 большего диаметра. После эжектора воздух вторично очищается от пыли фильтром 8 и поступает к устройствам 10 пневмоавтоматики. Манометром 9 контролируется рабочее давление, величина которого может корректироваться редуктором 4. Все вышеописанные пневмосистемы относятся к разомкнутым (бесциркуляционным). На рис.11.4, г показана замкнутая схема питания системы пневмоавтоматики, используемая в условиях пыльной атмосферы. Подача воздуха к блоку пневмоавтоматики 3 осуществляется вентилятором 1 через фильтр 2, причем всасывающий канал вентилятора соединен с внутренней полостью герметичного кожуха блока 3, которая одновременно через фильтр тонкой очистки 4 сообщается с атмосферой. Часто в качестве вентилятора используются бытовые электропылесосы, способные создавать давление до 0,002 МПа. Воздух, поступающий к потребителям, должен быть очищен от механических загрязнений и содержать минимум влаги. Для этого служат фильтры-влагоотделители, у которых в качестве фильтрующего элемента обычно используется ткань, картон, войлок, металлокерамика и другие пористые материалы с тонкостью фильтрации от 5 до 60 мкм. Для более глубокой осушки воздуха его пропускают через адсорбенты, поглощающие влагу. Чаще всего для этого используется силикагель. В обычных пневмоприводах достаточную осушку обеспечивают ресиверы и фильтры- влагоотделители, но вместе с тем воздуху необходимо придавать смазочные свойства, для чего служат маслораспылители фитильного или эжекторного типа. 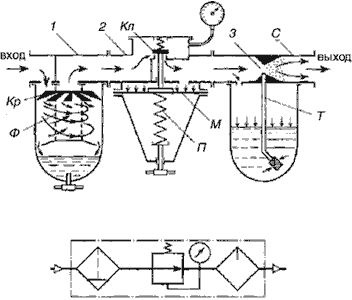 Рис.11.5. Типовой узел подготовки воздуха: а - принципиальная схема; б - условное обозначение На рис.11.5 показан типовой узел подготовки воздуха, состоящий из фильтра-влагоотделителя 1, редукционного клапана 2 и маслораспылителя 3. Поступающий на вход фильтра воздух получает вращательное движение за счет неподвижной крыльчатки Kр. Центробежной силой частицы влаги и механических примесей отбрасываются к стенке прозрачного корпуса и оседают в его нижнюю часть, откуда по мере необходимости удаляются через сливной кран. Вторичная очистка воздуха происходит в пористом фильтре Ф, после которого он поступает на вход редуктора, где происходит дросселирование через зазор клапана Кл, величина которого зависит от выходного давления над мембраной М. Увеличение усилия сжатия пружины П обеспечивает увеличение зазора клапана Кл и, следовательно, выходного давления. Корпус маслораспылителя 3 делается прозрачным и заполняется через пробку смазочным маслом. Создаваемое на поверхности масла давление вытесняет его через трубку T вверх к соплу С, где масло эжектируется и распыляется потоком воздуха. В маслораспылителях фитильного типа вместо трубки Т установлен фитиль, по которому масло поступает в распылительное сопло за счет капиллярного эффекта. 11.5. Исполнительные пневматические устройства Исполнительными устройствами пневмоприводов называются различные механизмы, обеспечивающие преобразование избыточного давления воздуха или вакуума в рабочее усилие. Если при этом рабочий орган совершает движение относительно пневмоустройства, то он называется пневмодвигателем, а если движения нет или оно происходит совместно с пневмоустройством, то оно называется пневмоприжимом или пневмозахватом. Пневмодвигатели могут быть, как и гидродвигатели, вращательного или поступательного действия и называются, соответственно, пневмомоторами и пневмоцилиндрами. Конструктивное исполнение этих устройств во многом похоже на их гидравлические аналоги. Наибольшее применение получили шестеренные, пластинчатые и радиально-поршневые пневмомоторы объемного действия. На рис.11.6, а показана схема радиально- поршневого мотора с передачей крутящего момента на вал через кривошипно-шатунный механизм. В корпусе 1 симметрично расположены цилиндры 2 с поршнями 3. Усилие от поршней передается на коленчатый вал 5 через шатуны 4, прикрепленные шарнирно к поршням и кривошипу коленчатого вала. Сжатый воздух подводится к рабочим камерам по каналам 8, которые поочередно сообщаются с впускным Вп и выхлопным Вх каналами распределительного золотника 6, вращающегося синхронно с валом мотора. Золотник вращается в корпусе распределительного устройства 7, к которому подведены магистрали впуска и выхлопа воздуха. Радиально-поршневые пневмомоторы являются относительно тихоходными машинами с частотой вращения вала до 1000…1500 об/мин. Более быстроходны шестеренные и пластинчатые моторы (2000…4000 об/мин), но самыми быстроходными (до 20000 об/мин и более) могут быть турбинные пневмомоторы, в которых используется кинетическая энергия потока сжатого воздуха. В частности, такие моторы используются для вращения рабочих колес вентиляторов на горных предприятиях. 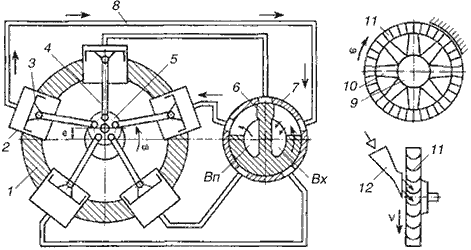 Рис.11.6. Схемы пневмомоторов объемного (а) и динамического (б) действия На рис.11.6, б показана схема пневмопривода колеса вентилятора, состоящего из ступицы 9 с лопаток 10, к которым жестко прикреплен вращающийся обод с лопатками пневмомотора 11. Поток сжатого воздуха, вытекающий из сопла 12 по касательной к изогнутым лопаткам 11, отдает свою энергию и заставляет вращаться колесо вентилятора с большой скоростью. Описанное устройство можно назвать пневмопреобразователем, преобразующим поток воздуха высокого давления в поток низкого давления с гораздо большим расходом. Пневмопривод отличается большим разнообразием оригинальных исполнительных устройств с эластичными элементами в форме мембран, оболочек, гибких нитей, рукавов и т.н. Они широко используются в зажимных, фиксирующих, переключающих и тормозных механизмах современных автоматизированных производств. К ним относятся мембранные и сильфонные пневмоцилиндры с относительно малой величиной рабочего хода штока. Плоская резиновая мембрана позволяет получить перемещение штока на 0,1...0,5 от ее эффективного диаметра. При выполнении мембраны в форме гофрированного чулка рабочий ход увеличивается до нескольких диаметров мембраны. Такие пневмоцилиндры называются сильфонными. Они могут быть с внешним и внутренним подводом воздуха. В первом случае длина гофрированной трубки под действием давления уменьшается, во втором увеличивается за счет деформации гофров. В качестве эластичного элемента применяется резина, резинотканевые и синтетические материалы, а также тонколистовая сталь, бронза, латунь. Увеличение скорости выполнения операций во многих случаях достигается применением пневмозахватов, схемы которых показаны на рис.11.7. Для перемещения листовых изделий используются пневмоприсоски, относящиеся к вакуумным захватам безнасосного и насосного типа. В захватах безнасосного типа (рис.11.7, а) вакуум в рабочей камере К создается при деформации самих элементов захвата, выполненных в виде гибкой тарелки, прилегающей своей кромкой к детали и подвижным поршнем, к которому прикладывается внешнее усилие. Величина вакуума при подъеме детали пропорциональна ее весу и обычно бывает не более 55 кПа. Для обеспечения лучшего притяжения, особенно для недостаточно гладкой поверхности детали, применяют захваты насосного типа, у которых воздух из рабочей камеры отсасывается насосом до глубины вакуума 70…95 кПа. Часто применяют простые устройства эжекторного типа (рис.11.7, б), в которых кинетическая энергия струи жидкости, пара или воздуха используется для отсасывания воздуха из рабочей камеры К, находящейся между присоской П и деталью. Сжатый воздух, поступающий на вход А, проходит с большой скоростью через сопло Б эжектора и создает пониженное давление в камере В и канале Г, сообщающимся с рабочей камерой К. 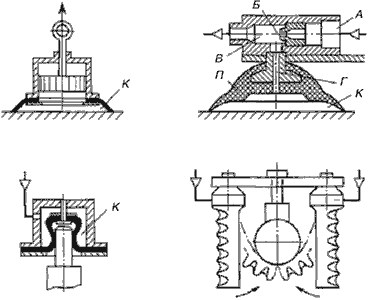 Рис.11.7. Схемы пневмозахватов Для зажима деталей цилиндрической формы применяют пневмозахваты, выполненные по схемам в и г (рис.11.7). При подводе воздуха в рабочую камеру К упругий цилиндрический колпачок охватывает шейку вала и создает усилие, достаточное для его зажима. На схеме г показан двухсторонний пневмозахват, рабочими элементами которого служат сильфоны с односторонним гофром. При создании избыточного давления внутри сильфона гофрированная сторона растягивается на большую длину, чем гладкая, что вызывает перемещение незакрепленной (консольной) стороны трубки в направлении охватываемой детали. Такими устройствами можно фиксировать детали не только круглой формы, но и с любыми фасонными поверхностями. В ряде случаев возникает потребность в перемещении рабочих органов на большие расстояния до 10…20 м и более по прямолинейной или искривленной траектории. Применение обычных штоковых пневмоцилиндров ограничено рабочим ходом до 2 м. Конструкции бесштоковых пневмоцилиндров, удовлетворяющих этим требованиям, показаны на рис.11.8. 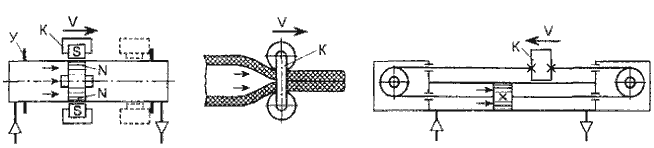 Рис.11.8. Схемы бесштоковых пневмодвигателей поступательного движения Отсутствие жесткого штока позволяет практически в два раза уменьшить длину цилиндра в выдвинутом положении. На схеме а показан длинноходовой пневмоцилиндр с передачей усилия через сильный постоянный магнит. Абсолютно герметичная гильза цилиндра выполнена из немагнитного материала, а ее внутренняя полость разделяется поршнем на две камеры, к которым подводится сжатый воздух. В поршне и каретке К, соединенной с рабочим органом, встроены противоположные полюса магнита S и N, взаимодействие которых обеспечивает передачу движущего усилия на каретку, скользящую по направляющим на внешней поверхности гильзы. Ход каретки ограничивается конечными упорами У. Практически неограниченную длину хода имеют пневмоцилиндры с эластичной гильзой (рис.11.8, б), охватываемой двумя роликами, соединенными кареткой К. Такие пневмоцилиндры очень эффективны для перемещения штучных грузов по сложной траектории и в приводах с небольшими рабочими усилиями. Пневмоцилиндр с гибким штоком показан на схеме рис.11.8, в. В такой конструкции тяговое усилие передается на каретку К от поршня через гибкий элемент (обычно стальной трос, облицованный эластичной пластмассой), охватывающий обводной и натяжной ролики, расположенные на крышках цилиндра. |