Лекции Гидравлические и пневматические машины. Общая характеристика привода Структурная схема гидропривода
 Скачать 1.55 Mb. Скачать 1.55 Mb.
|

|
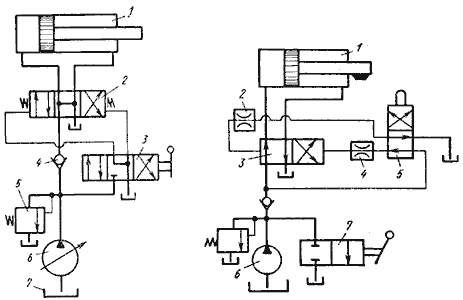
10.2. Гидросистемы с двухступенчатым усилением В автоматических системах распространены двухступенчатые распределители, в которых задающее устройство воздействует на распределитель не напрямую, а через промежуточный вспомогательный распределитель (пилот), благодаря чему можно существенно снизить мощность сигнала.
Схема гидросистемы с силовым цилиндром 1, снабженная подобным двухступенчатым распределителем, состоящим из основного 2 и вспомогательного 3 четырехходовых золотников, представлена на рис.10.4. Система снабжена регулируемым насосом 6, а также предохранительным 5 и обратным 4 клапанами. Основной трехпозиционный четырехходовой распределитель 2 с отрицательным перекрытием каналов (см. также рис.5.7) в среднем положении управляется давлением рабочей жидкости с помощью вспомогательного трехпозиционного четырехходового распределителя 3 с ручным или иным управлением. В среднем положении этого вспомогательного распределителя, представленном на рис.10.4, рабочие полости цилиндров сервопривода основного распределителя 2 соединены между собой с баком 7. В результате этот распределитель устанавливается под действием пружин в среднее положение, при котором все его каналы соединяются с баком, что соответствует разгрузке (переводу в режим холостого хода) насоса. Схема аналогичной системы представлена на рис.10.5. Система снабжена нерегулируемым насосом 6 с ручной разгрузкой (переводом насоса на холостой ход), осуществляемой с помощью двухступенчатого двухходового распределителя (переключателя) 7. Реверсирование движения поршня силового цилиндра 1 осуществляется с помощью упоров, установленных на его штоке, воздействующих на четырехходовой двухпозиционный распределитель 5, обеспечивающий переключение (реверсирование) основного четырехходового двухпозиционного распределителя 3 скорость переключения распределителя 3 ограничена дросселями 2 и 4. 10.3. Гидросистемы непрерывного (колебательного) движения В ряде случаев (в металлорежущих станках и пр.) требуется обеспечить непрерывные колебательные прямолинейные или поворотные движения исполнительного гидродвигателя. Схема такой гидросистемы с гидродвигателем поворотного действия (моментным гидроцилиндром) 4 приведена на рис.10.6. Управление системой осуществляется автоматически действующим двухпозиционным распределителем 2 и разгрузочными клапанами последовательного включения 6 и 11 с управлением с помощью давления жидкости, перепускаемой предохранительными клапанами 5 и 7 в конце каждого хода поворотного поршня цилиндра. 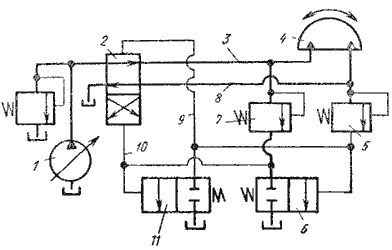 Рис.10.6. Гидросистема, обеспечивающая поворотно-колебательные движения В положении аппаратов системы, представленном на рис.10.6, жидкость от регулируемого насоса 1 поступает через двухпозиционный гидравлически управляемый распределитель 2 и напорную магистраль 3 в цилиндр 4 и удаляется из последнего в бак через магистраль 8. В конце каждого хода поршня поворотного цилиндра 4 клапан 7 в результате повышения давления перепускает жидкость в линию 10 управления распределителем 2 и клапаном 11, перемещая их рабочие элементы. При этом клапан 11 соединяет линию управления 9, связанную с верхней полостью распределителя 2, с баком, в результате чего распределитель 2 переключается, соединяя насос с магистралью 8, ведущей в противоположную полость цилиндра 4. При этом происходит реверс последнего, причем в конце хода цилиндра вступают в действие в той же последовательности предохранительный 5 и разгрузочный 6 клапаны, обеспечивающие повторение реверса поршня цилиндра. Рассмотренная схема применима также и для поворотных колебательных движений цилиндра прямолинейного движения. 10.4. Электрогидравлические системы с регулируемым насосом К гидросистемам с двухступенчатым электро-гидравлическим управлением относится система с регулируемым реверсивным насосом, реверс которого осуществляется сервоприводом, управляемым электрогидравлическим распределителем. Подобная схема гидросистемы с реверсивным регулируемым насосом 2 и гидравлически управлением производительностью по положению поршня 9 сервопривода представлена на рис.10.7. 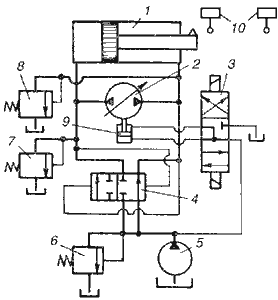 Рис.10.7. Гидросистема с регулируемым реверсивным насосом Система снабжена вспомогательным насосом 5, питающим систему регулирования (управления) подачи основного рабочего насоса, а также осуществляющим его подпитку. Сигнал на реверсирование подачи насоса 2 поступает от вспомогательного четырехходового трехпозиционного распределителя 3 с электромагнитным управлением, получающего электросигнал от концевых переключателей 10. При реверсировании насоса 2 одновременно переключается двухпозиционный четырехходовой распределитель 4 с гидравлическим управлением на питание вспомогательным насосом 5 соответствующей всасывающей полости насоса 2. Насос 2 снабжен предохранительными клапанами 7 и 8, отрегулированными на требуемые давления при прямом и обратном ходах поршня цилиндра 1, а насос 5 - предохранительным клапаном 6, отрегулированным на давление, необходимое для обеспечения требований системы управления и подпитки. 10.5. Гидросистемы с двумя спаренными насосами В ряде машин, в частности в металлорежущих станках, распространены схемы с двумя спаренными насосами. Один из них (нерегулируемый) работает на низком давлении с большей подачей, и обеспечивает требующийся ускоренный холостой ход. А второй (регулируемый) работает на высоком давлении с небольшой подачей и служит для выполнения рабочего хода.
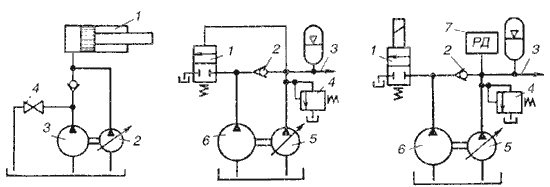
Упрощенная схема такой системы приведена на рис.10.8. Ускоренное перемещение поршня обеспечивается суммарной подачей двух насосов высокого 2 и низкого 3 давлений. По окончании ускоренного перемещения насос 3 вручную или автоматически по сигналу давления отключается при помощи открытия перекрывного крана 4, после чего питание цилиндра 1 обеспечивается одним насосом 2, который является регулируемым. На рис.10.9, а показана принципиальная схема подобной гидросистемы питания потребителей двумя спаренными насосами 5 и 6 с автоматическим переключением. До тех пор, пока давление в линии 3 потребителей не достигнет заданного значения, на которое отрегулирована возвратная пружина двухходового распределителя (переключателя) 1, каналы последнего будут перекрыты, и в линию 3 поступает жидкость от обоих насосов. При заданном же давлении, определяемом характеристикой пружины переключателя 1, насос низкого давления 6 автоматически переключится на бак, насос же 5 с помощью обратного клапана 2 отсоединится от переключателя 1 и будет продолжать питание гидросистемы. Давление, развиваемое в этом случае насосом 5, ограничено предохранительным клапаном 4. Принципиальная схема подобной же гидросистемы представлена на рис.10.9, б. Эта схема отключается от рассмотренной выше тем, что отключение насоса 6 низкого давления осуществляется электрогидравлическим реле давления 7, подающим при заданном давлении сигнал на электромагнитный переключатель 1. 10.6. Питание одним насосом двух и несколько гидродвигателей Многие гидросистемы имеют несколько гидродвигателей, питаемые от одного насоса. При такой схеме возможны два варианта подключения гидродвигателей. Гидросистема с параллельным включением гидропривода показана на рис.10.10. Гидросистема имеет одну общую насосную станцию 1 и три гидроцилиндра 2, 3 и 4. Каждый из гидроцилиндров имеет собственное независимое устройство управления - гидрораспределители 6, 7 и 8. В точке 5 гидролиния имеет разветвление, в котором общая подача насосной станции 1 делится на три части Q1, Q2 и Q3 . Каждый из гидроцилиндров может включаться в работу в любой момент времени, независимо от других потребителей, и совершать как холостой, так и рабочий ход. 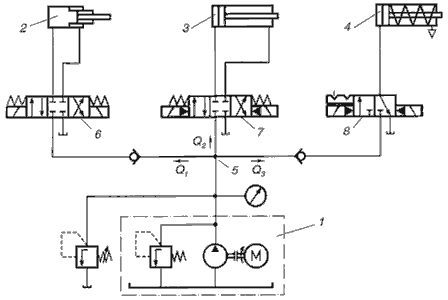 Рис.10.10. Гидросистема параллельным включением гидропривода Гидросистема с последовательным включением гидропривода представлена на ри.10.11. Гидросистема имеет два гидроцилиндра 1 и 2, которые питаются от общей насосной станции 3. В отличие от гидросистемы с параллельным включением, гидроцилиндр 2 может осуществлять рабочий ход только при неработающем первом гидроцилиндре, поскольку при включении гидроцилиндра 1, напорная линия цилиндра 2 становится сливной, в которой давление падает. При этом цилиндр 2 может осуществлять только холостой ход. Гидросистемы с параллельным включением гидропривода получили наибольшее распространение. Однако, показанная на рис.10.10 гидросхема имеет один существенный недостаток. 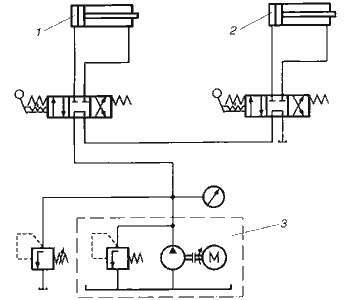 Рис.10.11. Гидросистема последовательным включением гидропривода 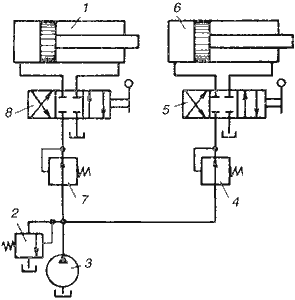 Рис.10.12. Гидросистема с двумя гидроцилиндрами, питаемыми одним наосом через редукционные клапаны Дело в том, что при включении всех трех гидроцилиндров скорость перемещения их выходных звеньев будет минимальна. Если отключить один из них, например первый (2), то скорость у второго и третьего возрастет, так как общая подача будет делиться только на Q2 и Q3. Чтобы этого избежать, в гидросистему необходимо включать редукционные клапаны. На рис.10.12 представлена схема гидросистемы с одним насосом 3 и двумя силовыми цилиндрами 1 и 6, один из которых (цилиндр 6) рассчитан на работу при внешней нагрузке (давлении), значительно меньшей нагрузки второго цилиндра 1. Для снижения давления в системе питания цилиндра 6 до требуемой величины применен редукционный клапан 4, установленный на входе в распределитель 5. Для цилиндра 1 также предусмотрен редукционный клапан 7, отрегулированный на рабочее давление в этом цилиндре. Редукционный клапан 7 также устанавливается на входе в распределитель 8, управляющий цилиндром 1. Насос 3 снабжен переливным клапаном 2, который сбрасывает излишек рабочей жидкости в бак. Пневматический привод 11.1. Общие сведения о применении газов в технике Любой объект, в котором используется газообразное вещество, можно отнести к газовым системам. Поскольку наиболее доступным газом является воздух, состоящий из смеси множества газов, то его широкое применение для выполнения различных процессов обусловлено самой природой. В переводе с греческого pneumatikos - воздушный, чем и объясняется этимологическое происхождение названия пневматические системы. В технической литературе часто используется более краткий термин - пневматика. Пневматические устройства начали применять еще в глубокой древности (ветряные двигатели, музыкальные инструменты, кузнечные меха и пр.), но самое широкое распространение они получили вследствие создания надежных источников пневматической энергии - нагнетателей, способных придавать газам необходимый запас потенциальной и (или) кинетической энергии. Пневматический привод, состоящий из комплекса устройств для приведения в действие машин и механизмов, является далеко не единственным направлением использования воздуха (в общем случае газа) в технике и жизнедеятельности человека. В подтверждение этого положения кратко рассмотрим основные виды пневматических систем, отличающихся как по назначению, так и по способу использования газообразного вещества. По наличию и причине движения газа все системы можно разделить на три группы. К первой группе отнесем системы с естественной конвекцией (циркуляцией) газа (чаще всего воздуха), где движение и его направление обусловлено градиентами температуры и плотности природного характера, например, атмосферная оболочка планеты, вентиляционные системы помещений, горных выработок, газоходов и т.п. Ко второй группе отнесем системы с замкнутыми камерами, не сообщающимися с атмосферой, в которых может изменяться состояние газа вследствие изменения температуры, объема камеры, наддува или отсасывания газа. К ним относятся различные аккумулирующие емкости (пневмобаллоны), пневматические тормозные устройства (пневмобуферы), всевозможные эластичные надувные устройства, пневмогидравлические системы топливных баков летательных аппаратов и многие другие. Примером устройств с использованием вакуума в замкнутой камере могут быть пневмозахваты (пневмоприсоски), которые наиболее эффективны для перемещения штучных листовых изделий (бумага, металл, пластмасса и т.п.) в условиях автоматизированного и роботизированного производства. К третьей группе следует отнести такие системы, где используется энергия предварительно сжатого газа для выполнения различных работ. В таких системах газ перемещается по магистралям с относительно большой скоростью и обладает значительным запасом энергии. Они могут быть циркуляционными (замкнутыми) и бесциркуляционными. В циркуляционных системах отработавший газ возвращается по магистралям к нагнетателю для повторного использования (как в гидроприводе). Применение систем весьма специфично, например, когда недопустимы утечки газа в окружающее пространство или невозможно применение воздуха из-за его окислительных свойств. Примеры таких систем можно найти в криогенной технике, где в качестве энергоносителя используются агрессивные, токсичные газы или летучие жидкости (аммиак, пропан, сероводород, гелий, фреоны и др.). В бесциркуляционных системах газ может быть использован потребителем как химический реагент (например, в сварочном производстве, в химической промышленности) или как источник пневматической энергии. В последнем случае в качестве энергоносителя обычно служит воздух. Выделяют три основных направления применения сжатого воздуха. К первому направлению относятся технологические процессы, где воздух выполняет непосредственно операции обдувки, осушки, распыления, охлаждения, вентиляции, очистки и т.п. Очень широкое распространение получили системы пневмотранспортирования по трубопроводам, особенно в легкой, пищевой, горнодобывающей отраслях промышленности. Штучные и кусковые материалы транспортируются в специальных сосудах (капсулах), а пылевидные в смеси с воздухом перемещаются на относительно большие расстояния аналогично текучим веществам. Второе направление - использование сжатого воздуха в пневматических системах управления (ПСУ) для автоматического управления технологическими процессами (системы пневмоавтоматики). Это направление получило интенсивное развитие с 60-х годов благодаря созданию универсальной системы элементов промышленной пневмоавтоматики (УСЭППА). Широкая номенклатура УСЭППА (пневматические датчики, переключатели, преобразователи, реле, логические элементы, усилители, струйные устройства, командоаппараты и т.д.) позволяет реализовать на ее базе релейные, аналоговые и аналого-релейные схемы, которые по своим параметрам близки к электротехническим системам. Благодаря высокой надежности они широко используются для циклового программного управления различными машинами, роботами в крупносерийном производстве, в системах управления движением мобильных объектов. Третьим направлением применения пневмоэнергии, наиболее масштабным по мощности, является пневматический привод, который в научном плане является одним из разделов обшей механики машин. У истоков теории пневматических систем стоял И.И. Артоболевский. Он был руководителем Института машиноведения (ИМАШ) в Ленинграде, где под его руководством в 40 - 60-х годах систематизировались и обобщались накопленные сведения по теории и проектированию пневмосистем. Одной из первых работ по теории пневмосистем была статья А.П. Германа "Применение сжатого воздуха в горном деле", опубликованная в 1933 г., где впервые движение рабочего органа пневмоустройства решается совместно с термодинамическим уравнением состояния параметров воздуха. Значительный вклад в теорию и практику пневмоприводов внесли ученые Б.Н. Бежанов, К.С. Борисенко, И.А. Бухарин, А.И. Вощинин, Е.В. Герц, Г.В. Крейнии, А.И. Кудрявцев, В.А. Марутов, В.И. Мостков, Ю.А. Цейтлин и другие. 11.2. Особенности пневматического привода, достоинства и недостатки Область и масштабы применения пневматического привода обусловлены его достоинствами и недостатками, вытекающими из особенностей свойств воздуха. В отличие от жидкостей, применяемых в гидроприводах, воздух, как и все газы, обладает высокой сжимаемостью и малой плотностью в исходном атмосферном состоянии (около 1,25 кг/м 3), значительно меньшей вязкостью и большей текучестью, причем его вязкость существенно возрастает при повышении температуры и давления. Отсутствие смазочных свойств воздуха и наличие некоторого количества водяного пара, который при интенсивных термодинамических процессах в изменяющихся объемах рабочих камер пневмомашин может конденсироваться на их рабочих поверхностях, препятствует использованию воздуха без придания ему дополнительных смазочных свойств и влагопонижения. В связи с этим в пневмоприводах имеется потребность кондиционирования воздуха, т.е. придания ему свойств, обеспечивающих работоспособность и продляющих срок службы элементов привода. С учетом вышеописанных отличительных особенностей воздуха рассмотрим достоинства пневмопривода в сравнении с его конкурентами - гидро- и электроприводом. 1. Простота конструкции и технического обслуживания. Изготовление деталей пневмомашин и пневмоаппаратов не требует такой высокой точности изготовления и герметизации соединений, как в гидроприводе, т.к. возможные утечки воздуха не столь существенно снижают эффективность работы и КПД системы. Внешние утечки воздуха экологически безвредны и относительно легко устраняются. Затраты на монтаж и обслуживание пневмопривода несколько меньше из-за отсутствия возвратных пневмолиний и применения в ряде случаев более гибких и дешевых пластмассовых или резиновых (резинотканевых) труб. В этом отношении пневмопривод не уступает электроприводу. Кроме того, пневмопривод не требует специальных материалов для изготовления деталей, таких как медь, алюминий и т.п., хотя в ряде случаев они используются исключительно для снижения веса или трения в подвижных элементах. 2. Пожаро- и взрывобезопасность. Благодаря этому достоинству пневмопривод не имеет конкурентов для механизации работ в условиях, опасных по воспламенению и взрыву газа и пыли, например в шахтах с обильным выделением метана, в некоторых химических производствах, на мукомольных предприятиях, т.е. там, где недопустимо искрообразование. Применение гидропривода в этих условиях возможно только при наличии централизованного источника питания с передачей гидроэнергии на относительно большое расстояние, что в большинстве случаев экономически нецелесообразно. 3. Надежность работы в широком диапазоне температур, в условиях пыльной и влажной окружающей среды. В таких условиях гидро- и электропривод требуют значительно больших затрат на эксплуатацию, т.к. при температурных перепадах нарушается герметичность гидросистем из-за изменения зазоров и изолирующих свойств электротехнических материалов, что в совокупности с пыльной, влажной и нередко агрессивной окружающей средой приводит к частым отказам. По этой причине пневмопривод является единственным надежным источником энергии для механизации работ в литейном и сварочном производстве, в кузнечно-прессовых цехах, в некоторых производствах по добыче и переработке сырья и др. Благодаря высокой надежности пневмопривод часто используется в тормозных системах мобильных и стационарных машин. 4. Значительно больший срок службы, чем гидро- и электропривода. Срок службы оценивают двумя показателями надежности: гамма-процентной наработкой на отказ и гамма-процентным ресурсом. Для пневматических устройств циклического действия ресурс составляет от 5 до 20 млн. циклов в зависимости от назначения и конструкции, а для устройств нециклического действия около 10-20 тыс. часов. Это в 2 - 4 раза больше, чем у гидропривода, и в 10-20 раз больше, чем у электропривода. 5. Высокое быстродействие. Здесь имеется в виду не скорость передачи сигнала (управляющего воздействия), а реализуемые скорости рабочих движений, обеспечиваемых высокими скоростями движения воздуха. Поступательное движение штока пневмоцилиндра возможно до 15 м/с и более, а частота вращения выходного вала некоторых пневмомоторов (пневмотурбин) до 100 000 об/мин. Это достоинство в полной мере реализуется в приводах циклического действия, особенно для высокопроизводительного оборудования, например в манипуляторах, прессах, машинах точечной сварки, в тормозных и фиксирующих устройствах, причем увеличение количества одновременно срабатывающих пневмоцилиндров (например в многоместных приспособлениях для зажима деталей) практически не снижает время срабатывания. Большая скорость вращательного движения используется в приводах сепараторов, центрифуг, шлифовальных машин, бормашин и др. Реализация больших скоростей в гидроприводе и электроприводе ограничивается их большей инерционностью (масса жидкости и инерция роторов) и отсутствием демпфирующего эффекта, которым обладает воздух. 6. Возможность передачи пневмоэнергии на относительно большие расстояния по магистральным трубопроводам и снабжение сжатым воздухом многих потребителей. В этом отношении пневмопривод уступает электроприводу, но значительно превосходит гидропривод, благодаря меньшим потерям напора в протяженных магистральных линиях. Электрическая энергия может передаваться по линиям электропередач на многие сотни и тысячи километров без ощутимых потерь, а расстояние передачи пневмоэнергии экономически целесообразно до нескольких десятков километров, что реализуется в пневмосистемах крупных горных и промышленных предприятий с централизованным питанием от компрессорной станции. Известен опыт создания городской компрессорной станции в 1888 г. одним из промышленников в Париже. Она снабжала заводы и фабрики по магистралям протяженностью 48 км при давлении 0,6 МПа и имела мощность до 18500 кВт. С появлением надежных электропередач ее эксплуатация стала невыгодной. Максимальная протяженность гидросистем составляет около 250-300 м в механизированных комплексах шахт для добычи угля, причем в них используется обычно менее вязкая водно-масляная эмульсия. 7. Отсутствие необходимости в защитных устройствах от перегрузки давлением у потребителей. Требуемый предел давления воздуха устанавливается общим предохранительным клапаном, находящимся на источниках пневмоэнергии. Пневмодвигатели могут быть полностью заторможены без опасности повреждения и находиться в этом состоянии длительное время. 8. Безопасность для обслуживающего персонала при соблюдении общих правил, исключающих механический травматизм. В гидро- и электроприводах возможно поражение электрическим током или жидкостью при нарушении изоляции или разгерметизации трубопроводов. 9. Улучшение проветривания рабочего пространства за счет отработанного воздуха. Это свойство особенно полезно в горных выработках и помещениях химических и металлообрабатывающих производств. 10. Нечувствительность к радиационному и электромагнитному излучению. В таких условиях электрогидравлические системы практически непригодны. Это достоинство широко используется в системах управления космической, военной техникой, в атомных реакторах и т.п. Несмотря на вышеописанные достоинства, применяемость пневмопривода ограничивается в основном экономическими соображениями из-за больших потерь энергии в компрессорах и пневмодвигателях, а также других недостатков, описанных ниже. 1. Высокая стоимость пневмоэнергии. Если гидро- и электропривод имеют КПД, соответственно, около 70 % и 90 %, то КПД пневмопривода обычно 5-15 % и очень редко до 30 %. Во многих случаях КПД может быть 1 % и менее. По этой причине пневмопривод не применяется в машинах с длительным режимом работы и большой мощности, кроме условий, исключающих применение электроэнергии (например, горнодобывающие машины в шахтах, опасных по газу). 2. Относительно большой вес и габариты пневмомашин из-за низкого рабочего давления. Если удельный вес гидромашин, приходящийся на единицу мощности, в 5-10 раз меньше веса электромашин, то пневмомашины имеют примерно такой же вес и габариты, как последние. 3. Трудность обеспечения стабильной скорости движения выходного звена при переменной внешней нагрузке и его фиксации в промежуточном положении. Вместе с тем мягкие механические характеристики пневмопривода в некоторых случаях являются и его достоинством. 4. Высокий уровень шума, достигающий 95-130 дБ при отсутствии средств для его снижения. Наиболее шумными являются поршневые компрессоры и пневмодвигатели, особенно пневмомолоты и другие механизмы ударно- циклического действия. Наиболее шумные гидроприводы (к ним относятся приводы с шестеренными машинами) создают шум на уровне 85-104 дБ, а обычно уровень шума значительно ниже, примерно как у электромашин, что позволяет работать без специальных средств шумопонижения. 5. Малая скорость передачи сигнала (управляющего импульса), что приводит к запаздыванию выполнения операций. Скорость прохождения сигнала равна скорости звука и, в зависимости от давления воздуха, составляет примерно от 150 до 360 м/с. В гидроприводе и электроприводе, соответственно, около 1000 и 300 000 м/с. Перечисленные недостатки могут быть устранены применением комбинированных пневмоэлектрических или пневмогидравлических приводов. | ||||||||