Мтп. Определение положения осей системы координат станков различных групп
 Скачать 53.36 Kb. Скачать 53.36 Kb.
|

|
Практическое занятие №1 Тема: Определение положения осей системы координат станков различных групп Цель: Закрепление знания по основным способам задачи систем координат, а так же основным и вспомогательным движениям для различных станков с ЧПУ на практике. Время: 2 часа Оборудование: Калькулятор инженерный. Ручка, карандаш простой, линейка. Порядок выполнения работы: 1. Изучите материал по теме практической работы 2. Выполните пункт 2. данной работы 3. Ответьте на контрольные вопросы. Краткие теоретические и учебно-методические материалы по теме практической работы Разберем основные и вспомогательные движения, а так же оси координат на наших учебных станках. Станок может выполнять следующие операции: - сверление (сверло); - фрезерование (Фреза); - развертывание (развертка); - растачивание (при использовании повотортного стола); - распиливание дисковой фрезой; Системы координат и направления движения исполнительных органов станков с ЧПУ. Обработка заготовки на станке с ЧПУ выполняется по командам управляющей программы, которые в числовой форме задают величины отдельных перемещений исполнительных органов. Поэтому функционирование станка с ЧПУ, как и любого другого станка, в принципе невозможно без использования определенной системы координат, с помощью которой устанавливаются пространственные координаты любой точки в пределах рабочей зоны станка. Для станков с ЧПУ принята единая система координат, рекомендуемая Международной организацией по стандартизации (ISO), - прямоугольная система координат, часто называемая также декартовой. Декартова система координат в пространстве содержит три оси X, Y, Z, расположенные взаимно перпендикулярно и имеющие общую точку пересечения (начало координат), а также одинаковый геометрический масштаб (рис. 1).  В частном случае декартова система координат может иметь не три, а две координатные оси, находящиеся в одной плоскости. В этом случае говорят о декартовой системе координат на плоскости. В станках с ЧПУ координатные оси всегда ориентированы параллельно направляющим станка. В зависимости от типа станка расположение осей координат в пространстве может быть различным, но существуют следующие общие правила. Ось Z всегда совмещена с осью вращения шпинделя. Ее положительное направление всегда совпадает с направлением перемещения от устройства для крепления заготовки к режущему инструменту. Если в системе координат станка имеется хотя бы одна ось, расположенная горизонтально и не совпадающая с осью вращения шпинделя, то это будет обязательно ось X. Если ось Z расположена горизонтально, то положительным направлением оси X считается направление перемещения вправо, если встать лицом к левому - относительно передней плоскости - торцу станка. (Передняя плоскость станка - сторона, с которой располагаются пульт и основные органы управления станком.) Если ось Z расположена вертикально, то положительным направлением оси X считается направление перемещения вправо, если встать лицом к передней плоскости станка. Положительное направление оси Y определяется по одному из следующих правил: Смотря вдоль оси Z в положительном направлении, мысленно повернуть ось X на 90° по часовой стрелке вокруг оси Z. Правило правой руки: если мысленно поместить ладонь правой руки в начало координат таким образом, чтобы ось Z выходила из ладони перпендикулярно ей, а отогнутый под углом 90° к ладони большой палец показывал положительное направление оси X, то указательный палец будет показывать положительное направление оси Y. Тогда система координат токарного станка с ЧПУ с горизонтальным расположением шпинделя будет иметь только две оси, расположенные согласно рис. 2. 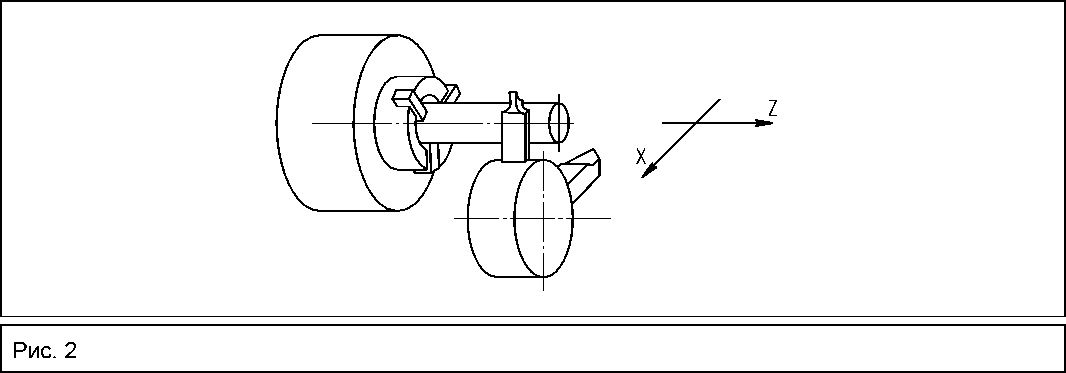 Система координат токарного станка с ЧПУ с вертикальным расположением шпинделя показана на рис. 3. 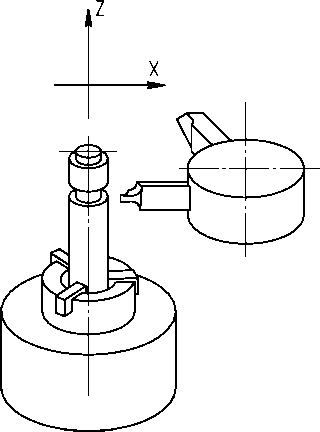 Рис. 3 Горизонтально-фрезерный станок имеет, как правило, три оси координат, их расположение показано на рис. 4. 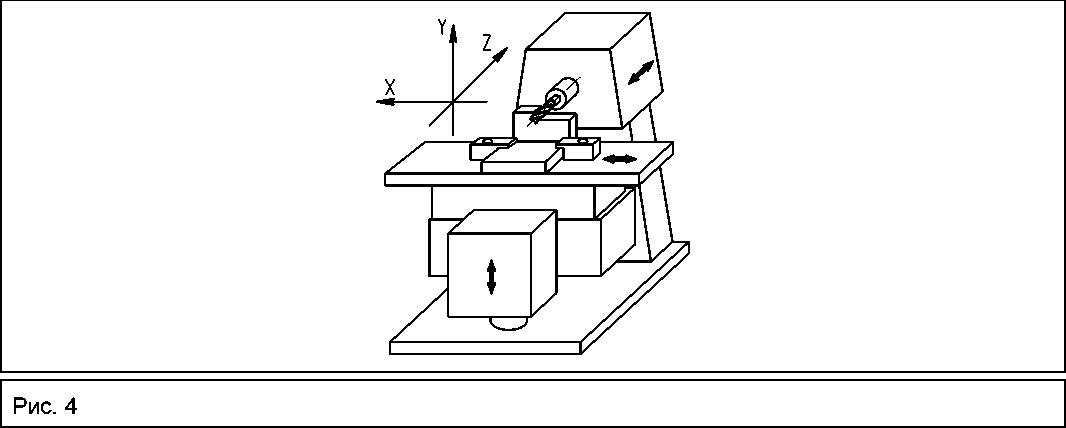 Вертикально-фрезерный станок, как правило, также имеет три оси координат, их расположение показано на рис. 5. 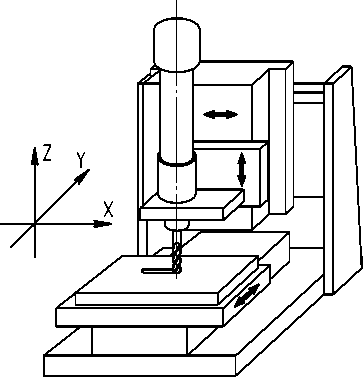 Рис. 5 В современной механообработке часто возникает необходимость в изготовлении столь сложных поверхностей, что это невозможно осуществить путем трехкоординатной обработки. В таких ситуациях применяют четырех- и пятикоординатную обработку. По управляющей программе для получения подобных поверхностей исполнительные органы станка помимо линейных перемещений могут также совершать вращательное движение (круговые перемещения). При этом за положительное направление (от «минуса» к «плюсу») поворотной координатной оси принимается направление по часовой стрелке, если смотреть на ось вращения в положительном направлении соответствующей ей линейной оси. В качестве примера на рис . 6 представлен многоцелевой четырехкоординатный станок с ЧПУ. В системе координат данного станка помимо трех декартовых осей координат имеется дополнительная ось вращения относительно оси Y, которое может выполнять часть рабочего стола. 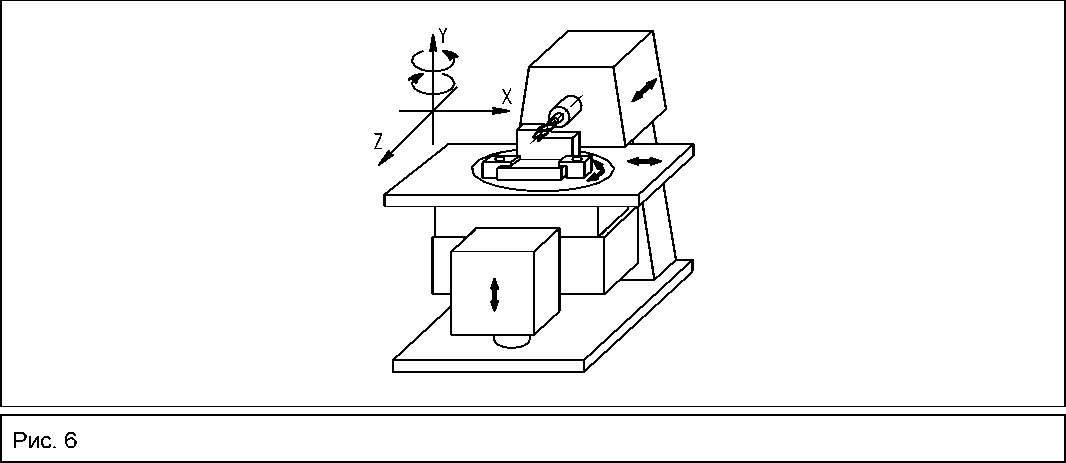 Практические задания:   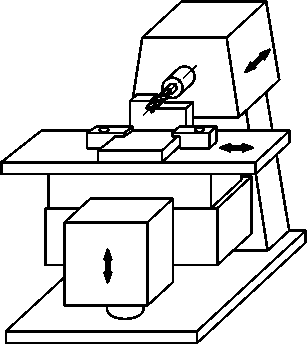 Изобразите на рисунках систему координат соответствующих станков с ЧПУ. Изобразите на рисунках систему координат соответствующих станков с ЧПУ.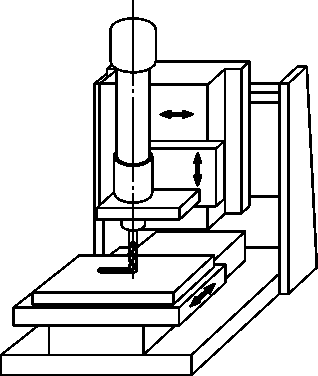 Отметьте правильные, на ваш взгляд, варианты утверждений, связанных с определением направлений координатных осей вертикально-фрезерного станка.
Контрольные вопросы. 1. Что такое основное и вспомогательное движение станка? приведите примеры. 2. Основные системы координат, применяемые на станках с ЧПУ 3. Опишите методику определения осей координат металлорежущего станка. 4. Правило правой руки. | |||||||||||||||||||||||||||||