стрктурый. ИДЗ №2_Григорьева. Определение скоростей и ускорений точек многозвенного механизма
 Скачать 1.77 Mb. Скачать 1.77 Mb.
|

|
Министерство образования и науки Российской Федерации Федеральное государственное автономное образовательное учреждение высшего образования «Национальный исследовательский Томский политехнический Университет»  Центр цифровых образовательных технологий 14.03.02 «Ядерные физика и технологии» _______________________________________ Определение скоростей и ускорений точек многозвенного механизма Индивидуальное домашнее задание №2 Вариант - 10104 по дисциплине: Механика
Томск – 2020 Определение скоростей и ускорений точек многозвенного механизма Вычертить механизм с учетом масштабного коэффициента, по заданным параметрам, приведенным со схемой механизма. Для вычерченного механизма определить: 1. Названия звеньев, количество кинематических пар и групп Ассура. 2. Линейные скорости всех точек механизма и угловые скорости звеньев методом планов. 3. Линейные ускорения точек механизма и угловые ускорения звеньев методом планов. 4. Ускорение точки М располагающейся на звене АВ Дано:   Схема механизма  Структурная схема
 Структурный состав
Общая формула строения механизма: [01]-[2-3]-[4-5]-[6-7] Рычажный механизм. Определение линейных скоростей всех точек механизма и угловых скоростей звеньев методом планов:      v  План скоростей:     Найдем скорость точки А:  , ,После выбираем наиболее подходящий масштабный коэффициент:  , ,На плане скоростей ставим произвольно точку (это будет полюс плана скоростей), строим отрезок ра=80 мм параллельно звену О1А. Найдём скорость точки В: Для этого запишем систему уравнений:  , ,Далее на плане скоростей строим вспомогательные прямые, перпендикулярные звеньям АВ и О2В; соединяем перпендикуляр (АВ) с концом вектора рva, а другую вспомогательную прямую с началом вектора. Тогда пересечение этих прямых и есть точка «в». Находим скорость точки В: Длину вектора  измеряем на плане скоростей измеряем на плане скоростей  , ,Определяем положение точки М на плане скоростей: Из условия известно, что АМ: МВ=3:2. Тогда можно записать следующее соотоношение:  , ,Тогда по полученным данным можно найти скорость точки М:  , ,Далее рассчитаем скорость звена АВ:  , ,Найдем скорость точки С: Для этого составим систему уравнений:  , ,Для построения на плане скоростей проводим вспомогательные прямые из полюса, перпендикулярные звеньям АВ и СО3, тогда точка пересечения и будет точкой «с» на плане. Для нахождения скорости измеряем длину вектора рс.  , ,Найдем скорость звена ВС:  , ,Воспользовавшись методом подобия или посмотрев на условие (O3D=O3C), увидим, что скорость точки С равна скорости точки D:  Найдем скорость точки К: Для этого составим систему уравнений:  , ,После построения на плане скоростей, необходимо измерить длину вектора рк и рkd. И тогда уже можно найти скорость точки К и звена KD.   Найдем угловые скорости звеньев:  План ускорений рычажного механизма: 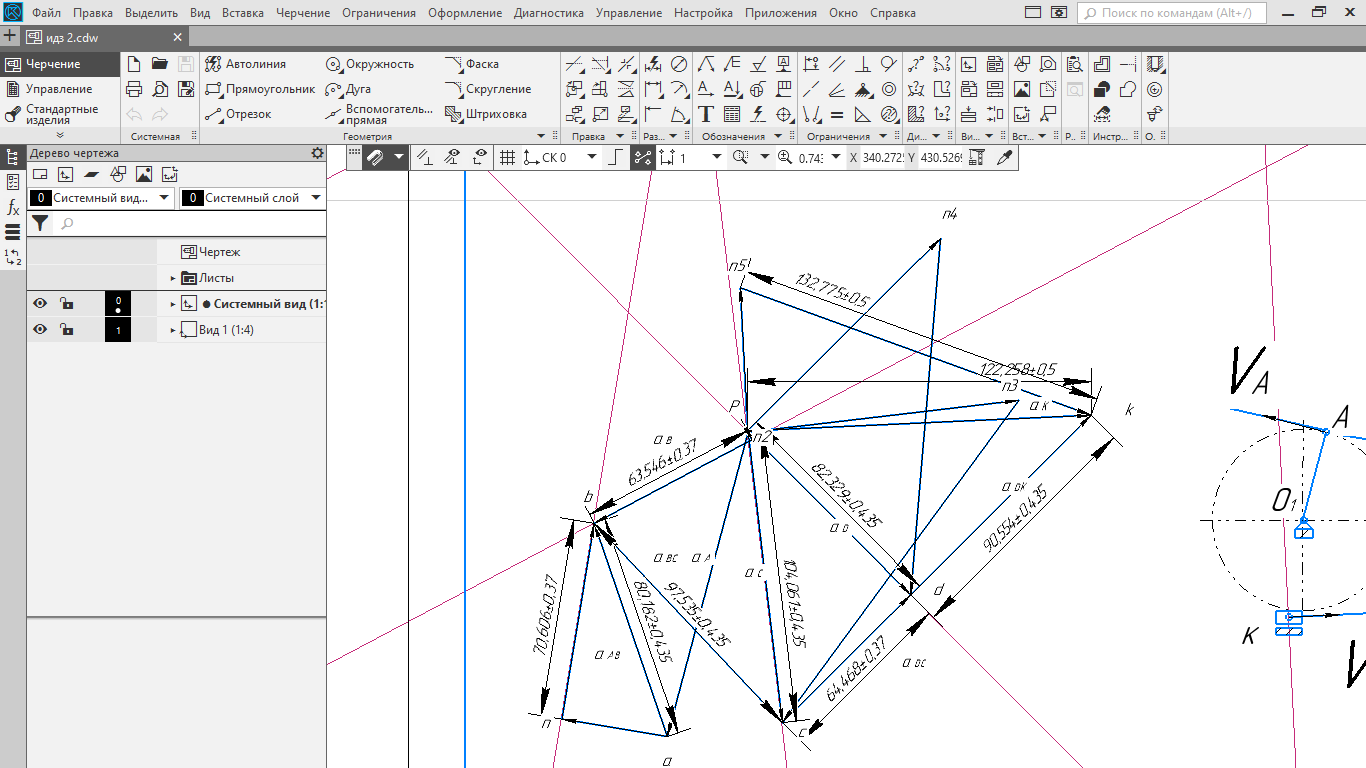 Найдем ускорение точки А:  Определим масштабный коэффициент для построения плана ускорений:  , ,Для построения: выбираем произвольную точку и обозначаем полюсом. Далее от этой точки откладываем отрезок длиной 112 мм, параллельный звену O1A. Найдём ускорение точки В: Для этого составим систему уравнений:  , ,Нормальное ускорение звена АВ и О2В можно найти по следующему выражению:  , ,После нахождения нормальны ускорений можно найти длины векторов an1 и рan2:  , ,На плане ускорений отмеряем вычисленные размеры так, чтобы:  Далее нужно сопоставить тангенсальные составляющие ускорений. Для этого к полученным отрезкам строим перпендикуляры, тогда точка пересечения и будет точкой «в». После измеряем необходимые длины векторов для нахождения ускорений:  Далее находим угловые ускорения звеньев:  , ,Найдём ускорение точки С, D: Для нахождения нужных параметров из полюса строим вспомогательные прямы, перпендикулярные звеньям O3C и O3D. После нахождения всех неизвестных параметром на плане ускорений записываем нужные уравнения для нахождения ускорений:  Найдём ускорение точки K:  Производим все необходимые построения и находим нужные длины и расстояния. Вычисляем нужные параметры:  Находим угловое ускорение:   | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||