Лекции по Информационно-измерительным системам. Основные определения. Области применения иис, Л. 1, глава 1, с. 6
 Скачать 2.88 Mb. Скачать 2.88 Mb.
|

- ПодключениеДля соединения ЖКИ-модуля с управляющей системой используется параллельная синхронная шина, насчитывающая 8 или 4 (выбирается программно) линий данных DB0...DB7, линию выбора операции R/W, линию выбора регистра RS и линию стробирования/синхронизации Е. Кроме линий управляющей шины имеются две линии для подачи напряжения питания 5 В - GND и VCC, и линия для подачи напряжения питания драйвера ЖКИ - V0. Указанные выше названия линий шины являются стандартными, но муществует множество различных вариантов расположения контактов у каждого конкретного конструктива ЖКИ-модуля. На самом деле, единственным реально стандартным вариантом расположения контактов является двухрядное 14-ти контактное поле, расположенное вертикально в левой части модуля, а также совпадающее в ним двухрядное 16-ти контактное поле, содержащее дополнительную пару контактов с подключенными к ней выводами питания подсветки. В любом случае, для получения достоверной информации необходимо воспользоваться соответствующей справочной литературой изготовителя модуля. 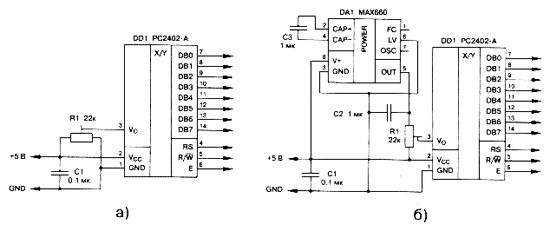 Рисунок. 1.- Подача питания на ЖКИ-модульНа начальном этапе необходимо подать питание на ЖКИ-модуль и добиться от него признаков работоспособности. Схема включения модуля, рассчитанного на стандартный диапазон температур, показана на рис.1а. Подстроечный резистор R1 позволяет плавно менять напряжение питания драйвера ЖКИ, что приводит к изменению угла поворота жидких кристаллов. Этим резистором можно отрегулировать фактическую контрастность при некотором преимущественном угле наблюдения (снизу-вверх или сверху-вниз). Включение в данную схему ЖКИ-модуля, рассчитанного на расширенный диапазон температур, не приведет к успеху, так как из-за особенностей применяемых в них ЖК-материалов, эти ЖКИ требуют повышенного напряжения питания и при питании напряжением 5 В изображение либо будет отсутствовать совсем, либо будет слабоконтрастным. Для преодоления ситуации необходимо подать на вывод V0 отрицательное напряжение (напряжение на ЖКИ определяется разностью VCC и V0), составляющее в предельном случае - 5 В. Если в схеме отсуствует источник отрицательного напряжения, то не составляет труда собрать простейший преобразователь, например, по схеме на рис. 1б. Для активизации ЖКИ-модуля подайте напряжение питания и повращайте движок резистора R1 (рис. 1). После окончания цикла внутренней инициализации модуль включается в режим развертки одной верхней строки. При изменении напряжения на выводе V0 сегменты этой строки должны менять свое состояние от прозрачного до непрозрачного, что является свидетельством правильного подключения питания модуля и работоспособности контроллера и драйверов ЖКИ. Установите движок в такое положение, при котором изображение сегментов в верхней строке едва проступает на основном фоне ЖКИ. Теперь ЖКИ-модуль готов к приему и отображению информации. После того, как вы добьетесь отображения на индикаторе какого-либо текста, то сможете более точно отрегулировать изображение в соответствии с необходимой контрастностью и требуемым углом наблюдения. Для соединения модуля с управляющей системой можно выбрать один из двух вариантов: по 8-ми или 4-х разрядной шине. В первом случае потребуется 11 сигнальных линий, во втором - только 7. Сам процесс обмена также может быть организован двояко. Можно подключить ЖКИ-модуль к системной шине (если таковая имеется) и выполнить обмен в синхронном режиме с максимальной скоростью. Этому широко распространенному в прошлые годы сопособу присущ ряд недостатков. Во-первых, большинство современных устройств выполняется с применением однокристальных микро-ЭВМ без использования дополнительной внешней памяти и, как следствие, системная шина у этих устройств просто отсутствует. Во-вторых, в современных системах повышенной сложности и производительности, у которых присутствует дополнительная память и, естественно, системная шина, скорость операций на шине находится за пределами возможностей контроллера HD44780 (2 МГц при питании 5 В и 1 МГц при 3 В). Это может потребовать введения дополнительных схем для замедления скрости работы шины при выполнении операций обмена с ЖКИ-модулем. В-третьих, подключение к системной шине в большинстве случаев потребует вводить схемы дешифрации и формирования сигналов Е и R/W, что опять приведет к дополнительным затратам. Все сказанное выше не означает, что вариант с подключением к шине приниципиально неэффективен. В какой-то конкретной системе этот способ, наоборот, может быть самым оптимальным. Кроме того, некоторые современные процессоры, например, семейство МС68НС12, имеет встроенные средства для формирования сигналов выборки (CS), с возможностью программно определить скорость обмена с каждым конкретным устройством. Другой вариант - очень простой путь - обмен с ЖКИ-модулем выполняется чисто программными средствами, через порты ввода-вывода упраляющей микро-ЭВМ. В дальнейшем мы сконцентрируем внимание именно на этом варианте, так как он позволяет рассмотреть общий случай, абстрагируясь от конкретной системы. Вариант соединения с системной шиной, напротив, требует рассмотрения конкретных устройств, поэтому в случае необходимости можно рекомендовать изучить временные диаграммы операций чтения и записи, приведенные на рис. 3 и 4, а также значения временных параметров, приведенные в табл. 5, 6 и сконструировать соответствующие управляющие схемы. На рис. 2а приведена схема подключения ЖКИ-модуля с 8-ми разрядной шиной к некоторой абстрактной микро-ЭВМ XYZ. Эта микро-ЭВМ содержит два порта: 8-ми разрядный двунаправленный РА0...РА7, к которому подключена шина DB0...DB7 ЖКИ-модуля, и 3-х разрядный РВ0...РВ2, к которому подключены линии управляющих сигналов: E, RS,R/W. На рис. 2б можно видеть схему подключения ЖКИ-модуля к этой же микро-ЭВМ в 4-х разрядном режиме. Обратите внимание, что для обмена в 4-х разрядном режиме используется старшая тетрада шины данных - DB4...DB7. 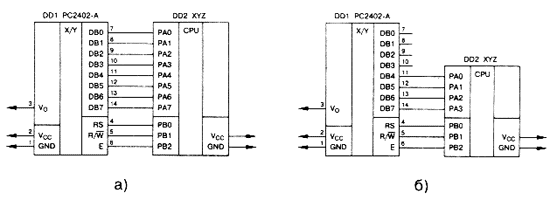 Рисунок. 2. Подключение к управляющей системеВ соответствии с временной диаграммой (рис. 3,4 ) в исходном состоянии сигнал Е = 0, сигнал R/W = 0, значение сигнала RS - произвольное, шина данных DBO...DB7 в состоянии высокого импеданса (НI). Такое состояние управляющих сигналов (E и R/W) должно поддерживаться все время в промежутках между операциями обмена с ЖКИ-модулем. Шина данных в эти моменты в принципе свободна, и может использоваться в мультиплексном режиме для каких-либо других целей, например, для сканирования матрицы клавиатуры. Естественно, необходимо позаботиться об исключении конфликтов на шине данных в момент совершения операций обмена с ЖКИ-модулем. Последовательности действий, которые необходимо выполнять управляющей системе при совершении операций записи и чтения для 8-ми и 4-х разрядной шины приведены соответственно в табл. 1...4. Таблица 1. Операции записи для 8-ми разрядной шины
Таблица 2. Операции чтения для 8-ми разрядной шины
Таблица 3. Операция записи для 4-х разрядной шины
Таблица 4. Операция чтения для 4-х разрядной шины
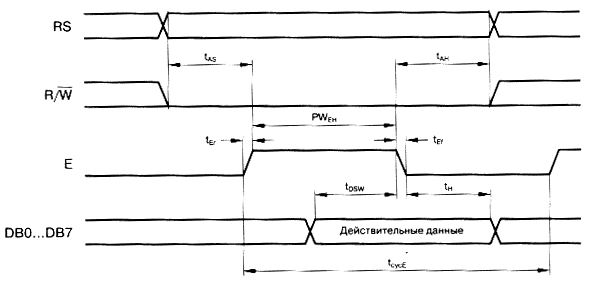 Рисунок. 3. Временная диаграмма операции записи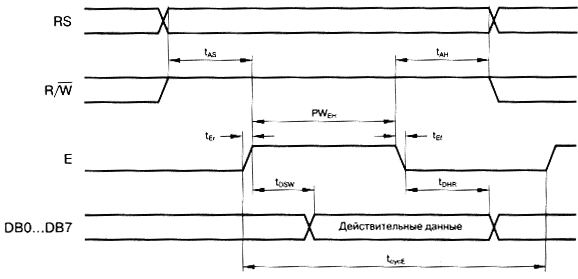 Рисунок. 4. Временная диаграмма операции чтенияШина данных. Линии DB0-DB7 могут иметь нагрузку один TTL выход .При подаче на вывод E напряжения низкого уровня линии DB0-DB7 переходят в состояние высокого импеданса.  RS  R/W R/W E    DB7 IR7 IR3 BF AC3 DB7 DB3 DB6 IR6 IR2 AC6 AC2 DB6 DB2 DB5 IR5 IR1 AC5 AC1 DB5 DB1 DB4 IR4 IR0 AC4 AC0 DB4 DB0 DB7 IR7 IR3 BF AC3 DB7 DB3 DB6 IR6 IR2 AC6 AC2 DB6 DB2 DB5 IR5 IR1 AC5 AC1 DB5 DB1 DB4 IR4 IR0 AC4 AC0 DB4 DB0 Запись инструкции IR Чтение флага BF Чтение регистра Запись инструкции IR Чтение флага BF Чтение регистраи счетчика адреса данных DR Рисунок 2. АС На рисунке 3 приведен пример временных последовательностей при проверке состояния флага занятости BF.  Рисунок 3 Приведенные в табл. 1...4 операции подразумевают, что время выполнения каждого шага составляет не менее 250 нс. При использовании современных быстродействующих микро-Эвм это условие может быть легко нарушено, поэтому необходимо тщательно контролировать минимальные значения временных интервалов, чтоюы они всегда находились в области допустимых значений, указанных в таблице 5, 6 и при необходимости вводить задержки. Таблица 5. Значения временных характеристик. Операция записи
Таблица 6. Значения временных характеристик. Операция чтения
Описанные выше операции записи/чтения байта являются базовыми для осуществления обмена с ЖКИ-модулем. Реализация этих двух операцуий - единственное, что отличает процесс обмена по 8-ми разрядной шине от обмена по 4-х разрядной шине. На основе этих двух операций, реализованных программно (когда модуль подключен к портам микро-ЭВМ), или аппаратно (когда модуль подключен к системной шине), строятся все виды операций программирования и управления. Несколько слов о подключении ЖКИ-модулей формата 40 х 4. Эти модели содержат два контроллера HD44780 и фактически представляют собой два модуля 40 х 2. Для сокращения числа соединений все сигналы обоих контроллеров соединены параллельно, исключение составляет только сигнал Е, одновременно выполняющий роль тактового сигнала и сигнала выборки микросхемы CS, поэтому обмен с каждым из контроллеров ведется попеременно. - Программирование и управлениеПеред началом рассмотрения принципов управления ЖКИ-модулем, обратимся к внутренней структуре контроллера HD44780, чтобы понять основные принципы построения ЖКИ-модулей на его основе. Эта информация позволит понять способы организации модулей различных форматов с точки зрения программной модели, а также мотивации конструкторов ЖКИ-модулей. Упрощенная структурная схема контроллера приведена на рис. 5. Можно сразу выделить основные элементы с которыми приходится взаимодействовать при программном управлении: регистр данных (DR), регистр команд (IR), видеопамять (DDRAM), ОЗУ знакогенератора (CGRAM), счетчик адреса памяти (АС), флаг занятости контроллера. 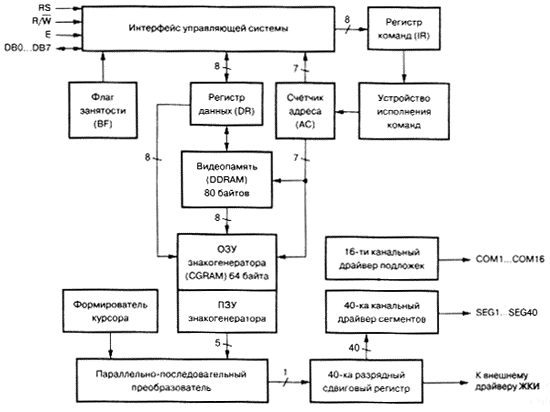 Рискнок. 5. Упрощенная структурная схема контроллера HD44780Другие элементы не являются объектом прямого взаимодействия с управляющей программой - они участвуют в процессе регенерации изображения на ЖКИ: знакогенератор, формирователь курсора, сдвиговые регистры и драйверы (напоминаем, что приведенная схема - упрощенная, и многие не важные для получения общей картины промежуточные элементы на ней опущены). Управление контроллером ведется посредством интерфейса управляющей системы. Основными объектами взаимодействия являются регистры DR и IR. Выбор адресуемого регистра производится линией RS, если RS = 0 - адресуется регистр команд (IR), если RS = 1 - регистр данных (DR). Данные через регистр DR, в зависимости от текущего режима, могут помещаться (или прочитываться) в видеопамять (DDRAM) или в ОЗУ знакогенератора (CGRAM) по текущему адресу, указываемому счетчиком адреса (АС). Информация, попадающая в регистр IR, интерпретируется устройством выполнения команд как управляющая последовательность. Прочтение регистра IR возвращает в 7-ми младших разрядах текущее значение счетчика АС, а в старшем разряде флаг занятости (BF). Видеопамять, имеющая общий объем 80 байтов, предназначена для хранения кодов символов, отображаемых на ЖКИ. Вмдеопамять организована в две строки по 40 символов в каждой. Эта привязка является жесткой и не подлежит изменению. Другими словами, независимо от того, сколько реальных строк будет иметь каждый конкретный ЖКИ-модуль, скажем, 80 х 1 или 20 х 4, адресация видеопамяти всегда производится как к двум строкам по 40 символов. Будучи устройством с динамической индикацией, контроллер циклически производит обновление информации на ЖКИ. Сам ЖКИ организован как матрица, состоящая в зависимости от режима работы из 8-ми (одна строка символов 5 х 7 точек), 11-ти (одна строка символов 5 х 10 точек) или 16-ти (две строки символов 5 х 7 точек) строк по 200 сегментов (когда строка насчитывает 40 символов) в каждой. Собственный драйвер конроллера HD44780 имеет только 40 выходов (SEG1...SEG40) и самостоятельно может поддерживать только 8-ми символьные ЖКИ. Это означает, что ЖКИ-модули форматов до 8 х 2 реализованы на одной единственной микросхеме HD44780, модули, имеющие большее количество символов, содержат дополнительные микросхемы драйверов, например, HD44100, каждая из которых дополнительно предоставляет управление еще 40-ка сегментами. Особняком стоят ЖКИ-модули формата 16 х 1. Они также реализованы с помощью одной единственной микросхемы HD44780, но одна 16-ти символьная строка в них фактически составлена из двух 8-ми символьных. И хотя это усложняет программное управление, ведь строка оказывается логически разорванной посередине, тем не менее, экономически это оправдано, ибо позволило создать ЖКИ-модуль, содержащий всего одну микросхему. Другой вариант пространственной адресации встречается в 4-х строчных модулях. Из-за проблем разводки токоведущих дорожек, первая и вторая строки этих модулей являются таковыми как обычно, третья же является продолжением первой строки, а четвертая - второй. У контроллера HD44780 существует набор внутренних флагов, определяющих режимы работы различных элементов контроллера (таблица 7). В таблице 8 приведены значения управляющих флагов непосредственно после подачи на ЖКИ-модуль напряжения питания. Переопределение значений флагов производится специальными командами, записываемыми в регистр IR, при этом комбинации старших битов определяют группу флагов или команду, а младшие содержат собственно флаги. Таблица 7. Флаги, управляющие работой контроллера HD44780
Таблица 8. Значения управляющих флагов после подачи питания
Список управляющих комбинаций битов регистра IR и выполняемые ими команды приведены в таблице 9. Так как на момент включения ЖКИ-модуль ничего не отображает (флаг D = 0), то для того, чтобы вывести какой-либо текст необходимо, как минимум, включить отображение, установив флаг D = 1. Вот пример широко распространенной последовательности для инициализации ЖКИ-модуля: $38, $OC, $06 (знак "$" перед числом указывает на шестнадцатеричное основание). $38 устанавливает режим отображения 2-х строк с матрицей 5 х 8 точек и работу с 8-ми разрядной шиной данных; $OC включает отображение на экране ЖКИ-можуля, без отображения курсоров; $06 устанавливает режим автоматического перемещения курсора слева-направо после вывода каждого символа. Таблица 9. Управляющие комбинации битов регистра IR
Контроллер HD44780 поддерживает как операции записи так и операции чтения. Чтение регистра DR приводит к загрузке содержимого DDRAM или CGRAM, в зависимости от текущего режима, при этом курсор смещается на одну позицию, как и при записи. Чтение регистра IR возвращает 8 значащих разрядов, причем в 7-ми младших содержится текущее значение счетчика АС (7 разрядов, если адресуется DDRAM, и 6 - если CGRAM), а в старшем - флаг занятости BF. Этот флаг имеет значение 1 когда контроллер занят и 0 - когда свободен. Необходимо учитывать, что большинство операций, выполняемых контроллером, занимают значительное время, около 40 мкс, а время выполнения некоторых доходит до единиц миллисекунд, поэтому цикл ожидания снятия флага BF должен обязательно присутствовать в программах драйвера ЖКИ-модуля и предшествовать совершению любой операции (естественно, кроме операции проверки флага BF). После совершения операции записи или чтения DDRAM и появления после нее признака готовности (BF = 0), прочитанное в этом же цикле (вместе с флагом BF) значение АС скорее всего не будет достоверным. Дело в том, что между появлением признака готовности и вычислением контроллером нового значения АС существует некоторый временной интервал, составляющий около 4 мкс при тактовой частоте контроллера 270 кГц. Поэтому, если необходимо получить истинное значение АС, нужно совершить повторную операцию прочтения IR спустя не менее чем 4 мкс (если контроллер работает на частоте 270 кГц время ожидания необходимо пропорционально увеличить). Вывод на экран символа производится записью его кода в регистр DR. При этом символ размещается в DDRAM по текущему адресу, указываемому АС, а значение АС увеличивается или уменьшается на 1. Чтобы произвести переустановку курсора на нужную позицию, необходимо присвоить АС соответствующее значение (см. таблицу 9). Здесь есть одна тонкость. Когда производится последовательная запись символов и в результате заполняется вся строка, курсор автоматически переходит на вторую строку, но если необходимо принудительно установить курсор, скажем, на начало второй стороки, то будет неверным присвоить АС казалось бы логичное значение $28 (40), правильным является значение $40 (64). Значения адресов DDRAM в диапазоне $28...$3fF (а равно и $68...$7F) являются неопределенными и результаты работы с ними могут быть непредсказуемыми. Необходимо учитывать, что контроллеры, устанавливаемые на ЖКИ-модули, могут иметь различные наборы символов, причем это может зависеть как от производителя контроллера, так и от модификации данной конкретной модели. Например, фирма Powertip выпускает ЖКИ-модули с четырьмя базовыми модификациями наборов символов: японской, европейской, французской и русской. Более того, существует как минимум два варианта русского набора символов: контроллер фирмы Hitachi (H2 по маркировке фирмы Powertip) и контроллер фирмы Epson (EH по маркировке Powertip). Контроллер фирмы Hitachi обладает существенным недостатком - у него весьма ограниченный набор русских символов, фактически у него имеются только прописные русские буквы, и даже среди них отсутствует символ "Ф". Напротив, контроллер фирмы Epson содержит полный набор русских символов в прописном и строчном вариантах, поэтому он весьма удобен для отечественных применений. Это свойство контроллеров фирмы Epson обеспечило им заслуженную популярность на российском рынке, поэтому в последнее время основная масса импортируемых в нашу страну ЖКИ-модулей оснащены именно этиим контроллером; в качестве примера в таблице 10 приведен набор символов этого контролера. Таблица 10. Таблица кодов символов контроллера Epson, набор "Russian" Из допустимых для размещения в DDRAM кодов символы с кодами $00...$07 (и их дубликат с кодами $08...$0F) имеют специальное назначение - это переопределяемые символы, графическое изображение которых может назначить сам потребитель, разместив соответствующую информацию в области CGRAM. Для программирования доступны 8 переопределяемых символов в режиме с матрицей 5 х 7 точек и 4 с матрицей 5 х 10 (в режиме 5 х 10 переопределяемые символы адресуются кодами DDRAM через один: $00, $02, $04, $06). Для кодирования матрицы используются горизонтально "уложенные" байты, пять младших битов которых несут информацию о рисунке (причем 1 означает, что сегмент будет включен), 4-й разряд каждого из 8-ми (или 11-ти в режиме 5 х 10) байтов матрицы определяет левую колонку символа, а 0-й - правую. Старшие три бита не используются, равно как и старшие пять байтов, составляющих полную область матрицы символа (16 байтов) в режиме 5 х 10 (обратите внимание, что матрица программируемых символов допускает использование полной высоты строки (8 строчек для режима 5 х 7 и 11 строчек для режима 5 х 10), то есть можно размещать точки в области подчеркивающего курсора). Чтобы определить собственный симол необходимо установить счетчик АС на адрес начала матрицы требуемого символа в CGRAM - $00, $08, $10 и т.д. ($00, $10, $20 для режима 5 х 10 точек) - произвести перезапись всех байтов матрицы, начиная с верхней строки. После этого, записав в DDRAM код запрограммированного символа: $00, $01, $02 ($00, $02, $04 для режима 5 х 10 точек), на экране в соответствующем месте будет отображаться переопределенный символ. Несколько слов о процессе инициализации ЖКИ-модуля. Производитель контроллера рекомендует выполнять следующую последовательность действий для инициализации. Выдержать паузу не менее 15 мс между установлением рабочего напряжения питания (> 4,5 В) и выполнением каких-либо операций с контроллером. Первой операцией выполнить команду, выбирающую разрядность шины (это должна быть команда $30 независимо от того, какой разрядности интерфейс вы собираетесь использовать в дальнейшем), причем перед выполнением этой операции не проверять значение флага BF. Далее опять выдержать паузу не менее 4,1 мс и повторить команду выбора разрядности шины, причем перед подачей команды вновь не производить проверку флага BF. Следующим шагом необходимо вновь выдержать паузу, на этот раз 100 мкс, и в третий раз повторить команду установления разрядности шины, вновь без проверки BF. Эти три операции являются инициализирующими и призваны вывести контроллер в исходный режим работы (то есть перевести в режим работы с 8-ми разрядной шиной) из любого состояния. Следом за ними нормальным порядком (без выдерживания пауз, но с проверкой флага BF) выполняется инициализация режимов работы с выдачей инициализирующей последовательности, аналогичной указанной в таблице 7 (содержащей в том числе команду выбора необходимой разрядности шины). Необходимо помнить, что когда Вы объявляете режим работы с 4-х разрядной шиной, то есть выдаете команду $20, то делаете это обычно из 8-ми разрядного режима, который устанавливается автоматически после подачи напряжения питания, а значит вы не сможете адекватно объявить необходимое значение флагов N и F, располагающихся в младшей тетраде команды установки разрядности шины. Поэтому команду необходимо повторить в уже установившемся 4-х разрядном режиме путем последовательной передачи двух тетрад, то есть для 4-х разрядного режима образом. В заключение хотелось бы поделиться несколькими соображениями из практического опыта применения ЖКИ-модулей в процессе разработки и отладки реальных устройств. Не смотря на наличие "экономичного" 4-х разрядного режима, 7 необходимых для связи линий могут оказаться чрезмерным требованием для приборов, которые в современных условиях нередко строятся с применением микро-ЭВМ в 16ююю28-ми выводных корпусах и имеющих ограниченный ресусрс свободных портов. Оказалось, что часто, если конечно речь не идет о жесткой экономии каждой копейки, наиболее удобным способом использования ЖКИ-модуля становится создание отдельного контроллера на базе конкретной микро-ЭВМ с каким-либо последовательным интерфейсом, осуществляющего посредничество между управляющей системой и ЖКИ-модулем. Для тех кто ценит свое время и не имеет желания разрабатывать такой контроллер самостоятельно, фирма КТЦ-МК предлагает готовое решение - микросхему СЕ110 [3], созданную на базе микро-ЭВМ в 28-ми выводном корпусе SDIP или SOIC. Микросхема СЕ110 выполняет роль контроллера ЖКИ-модуля и клавиатуры (до 64-х клавиш) и предлагает в качестве интерфейса связи с управляющей системой двухпроводную шину I2C. На базе микросхемы СЕ110 производится демонстрационно-отладочная плата DB-CE110 [4], предназначенная для отладки устройств, использующих в своем составе микросхему СЕ110. Кроме того, эта плата с успехом выполняет роль простого терминала с ЖКИ-модулем 16 х 2 и 16-ти кнопочной клавиатурой, незаменимого при отладке устройств, не имеющих штатных средств ввода/визуализации, благодаря всего двум линиям легко реализуемой программно шины I2C. Для отладки же устройств, уже имеющих в своем составе I2C-устройства (микросхемы EEPROM, часов, датчиков температуры и т.п.), что отнюдь не является редкость, необходимость в каких-либо дополнительных ресурсах отпадает вовсе. - Питание На рисунке 6 приведены схемы подключения питание к двум типам LCD-модулей : нормального и расширенного температурных диапазонов. Нормальный температурный диапазон 0...+50С  Расширенный температурный диапазон -20...+50С  - Электрические характеристики Таблица 11.
SCADA системы [Л.12, часть 1] Сравнительный анализ пакетов Genesis, Trace Mode и Genie. [Л.12, часть 1] /software1_1996_1.pdf/ (Рассматривается необходимость применения пакетов SCADA/MMI в АСУ ТП, раскрываются скруктура SCADA$ cистем и методы программирования в них. Что должна уметь система SCADA? [Л.12, часть 1] /tools1_1998_3.pdf/.) TRACE MODE (описание возможностей SCADA$ системы) [Л.12, часть 1] /tools3_1998_3.pdf/. GENIE 3.0 (описание возможностей SCADA$ системы) [Л.12, часть 1] /tools4_1998_3.pdf/. GENESIS32 (описание возможностей SCADA$ системы)[Л.12, часть 1] /tools5_1998_3.pdf/. Промышленные компьютеры. Особенности. [Л.12, часть 1] /hardware2_1997_1.pdf/. Возможные причины отказов элементной базы КМОП в устройствах ИИС. [Л.12, часть 1] /note2_1996_1.pdf/. ЛитератураИзмерительные информационные системы: Учебник для вузов. Цапенко М.П. Москва: “Энергоатомиздат”, 1985. Сопряжение датчиков и устройств ввода данных с PC, под ред. У.Томпкинса и Дж.Уэбстера, Москва :“МИР”, 1992 Микропроцессорные устройства обработки информации: Учебное пособие для вузов. Лосев В.В. Мн.: Высшая школа., 1990. Вычислительные комплексы, системы и сети: Учебник для вузов. Ларионов А.М., Майоров С.А. Л.: “Энергоатомиздат”, 1987. Основы измерений. Электронные методы и приборы в измерительной технике. К.Б. Клаассен, Москва “ПОСТМАРКЕТ”, 2000. Основы теории и расчета информационно-измерительных систем. Новоселов О.Н., Фомин А.Ф. М.: Машиностроение, 1991. Основы электроники и микроэлектроники. Б.С. Гершунский, Киев “Выща школа”, 1989. Радиоэлектроника. Ю.Ф. Колонтаевский, Москва “Высшая школа”, 1988. Полупроводниковые оптоэлектронные приборы. Справочник. В.И. Иванов, А.И. Аксёнов, Москва “ЭНЕРГОАТОМИЗДАТ”, 1988. Популярные цифровые микросхемы. “МРБ” Справочник., В.Л. Шило, Москва “РАДИО И СВЯЗЬ”, 1987. Микросхемы ЦАП и АЦП: функционирование, параметры, применение. Справочник. Б.Г. Федорков, В.А.Телец, Москва “ЭНЕРГОАТОМИЗДАТ”, 1990. Каталог продукции ПРОСОФТ V8.1 (электронный вариант, часть 1 и 2, 2 x 700 MB). Interface_book.htm (электронный вариант). “Работа с последовательными портами в Windows”, Р.Кусяпкулов, “Радио”, 2000г., N1, с.23 SSJKS4_inf.pdf (технические характеристики и описание контроллера SSJKS4). WINTEK_LCD.inf (справочная информация по ЖКИ-индикаторам и дисплеям фирмы WINTEK). 100 схем с индикаторами. Ю.А. Быстров, Москва “Радио и связь”, 1990 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||